 德赢Vwin官网
App
德赢Vwin官网
App


0 引言
无人机作为vwin 飞机类来袭目标,可为防空武器系统的火控雷达校飞、射击等任务提供空中靶标,是武器系统研制、鉴定过程中必不可少的装备。作为无人机的核心组成部分之一,飞控系统通过控制无人机的姿态,从而完成无人机各种模态下的飞行任务。某无人机飞控系统现有的测试方法包括分立部件测试和部件装机后的整机综合测试。两种方法均属于常规的静态测试,组织实施复杂、测试效率较低、任务准备周期长,而且对于无人机实际飞行过程的动态性能无法验证,对测试中出现的故障难以定位,对于飞行中的环境干扰因素(主要是风干扰)和传感器失效后无人机的飞行情况也无法模拟,从而无法有针对性的进行飞行控制策略修正。综上问题,研制一套无人机飞控系统半物理仿真平台的任务显得尤为迫切。
1 平台总体功能及设计方案
1.1 平台总体功能
该平台以现有某型无人机飞控系统为测试对象,主要完成以下功能:
(1)与无人机飞控计算机和电动舵机、油门电机等实物结合,完成飞控系统的仿真测试;
(2)具备风干扰、力矩干扰条件下的飞行性能模拟,并以二维曲线方式实时显示无人机的飞行航迹、舵偏角、舵偏角速率等变化情况;
(3)能够进行无人机飞控系统部分传感器的故障设置,进行故障情况下的飞行模态仿真。
1.2 平台总体设计方案
半物理仿真平台由硬件设备和应用软件两部分组成。硬件设备包括新建的飞行系统模拟分系统、传感器与机载测控模拟分系统、遥控/遥测模拟分系统、指挥显示分系统、无人机外形显示分系统,以及现有的飞控计算机、飞控计算机接口箱、电动舵机、油门电机等实物。应用软件包括新建各分系统的应用程序。半物理仿真平台的原理组成框图如图1所示。
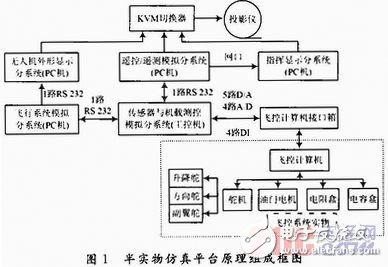
半物理仿真平台的工作原理概况如下:传感器与机载测控模拟分系统通过接口箱与飞控计算机交换无人机的舵偏角、角速率、油门开度、遥控指令、外部干扰等信息,并向飞行系统模拟分系统传输采样转换后的飞控计算机执行结果,向遥控/遥测模拟分系统传输遥测信息(包括传感器与机载测控模拟设备的仿真数据、故障状态、遥控指令回令等)。飞控计算机将接收到信息进行解算处理后,控制电动舵机、油门电机执行相应动作,并将执行结果返回至传感器与机载测控模拟分系统。飞行系统模拟分系统将解算后的飞机状态参数送到无人机外形显示分系统,解算后以三维动画的形式显示无人机的姿态、油门开度、高度变化等信息。指挥显示分系统将收到的无人机位置、高度、速度信息在数字地图上显示,适时发出指挥口令,由操作手干扰无人机的飞行。无人机的三维外形、测控数据、指挥显示界面通过KVM切换器分时在投影幕上显示。
2 平台硬件设计方案
2.1 平台硬件选型原则
(1)应用软件运行平台选择原则
由于该平台属于固定式测试设备,因此在各分系统应用软件运行平台的硬件应尽量采用机架式工控机或台式计算机,主板插槽的数量和类型应相对充裕,以便于现有硬件板卡的安装和平台的后续功能拓展。
(2)数据采集卡的选型原则:一是保证通道数;二是保证采样频率;三是保证数据分辨率。
2.2 平台硬件选择方案
(1)传感器与机载测控模拟分系统
该分系统包括了大量的信号采集、交换及处理任务,硬件采用工控机架构。配置数据采集卡、多串口卡以及自研的信号调理卡,完成数据采集与信息交换。
具体硬件型号和基本参数为:
工控机选用西门子547B:64位CPU处理器,4个PCI插槽,1个PCI-Ex16图形扩展接口。
多串口卡选用MOXA CP 118U:4路RS 232/422/485 PCI串口,串口通信速率为921.6 Kb/s;板载1 5 kVESD突波保护。
D/A卡选用NI PCI-6733:8路D/A,数据更新速率1 MS/s(16b),8路数宁I/O。
A/D卡选用NI PCIe-6259:4路D/A,数据更新速率为1 Ms/s(16 b),32路A/D通道数;A/D采样速率为2.8 MS/s(16 b),48路数字I/O。
DIO卡选用NI PCIe-6503:24路数字I/O。
(2)飞行系统模拟分系统、遥控/遥测模拟分系统
这两个分系统主要是进行无人机和测控数据的传输和解算,其硬件组成比较简单,选用带有多种类型主板插槽的普通商用台式计算机即可,配置MOXA CP118U多串口卡。
(3)指挥显示分系统、无人机外形显示分系统
这两个分系统主要是进行指挥、显示应用软件的运行,选用带有多种类型主板插槽的普通商用台式计算机即可。
2.3 自制信号调理卡设计
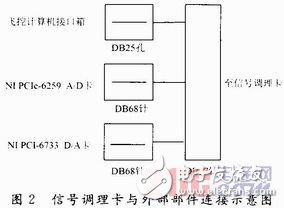
传感器与机载测控模拟分系统与遥控/遥测模拟分系统、飞行系统模拟分系统、飞控计算机接口箱等部分进行数据交换时,通过D/A,A/D,DIO板卡完成信号转换时,会受到机箱内复杂电磁环境的影响,导致输出信号带有很强的噪声,需要对其进行滤波处理。另外,由于飞控计算机接口箱输入输出电压均为+27 V,而D/A,A/D,DIO板卡工作电压均为+5 V,因此还需要设计信号调理卡完成信号滤波和工作电压的转换。信号调理卡与外部部件连接示意图如图2所示。
3 平台应用软件设计方案
平台应用软件包括飞行系统模拟分系统、无人机外形显示分系统、传感器与机载测控模拟分系统、遥控/遥测模拟分系统、指挥显示分系统等五个应用软件。
3.1 飞行系统模拟分系统
主要是通过解算无人机动力学模型,得到无人机的姿态、发动机等信息,实现无人机飞行仿真。仿真过程同时考虑风干扰、力矩干扰的装订。
(1)应用软件开发环境的选择
由于需要进行无人机动力学模型的解算,考虑到VC++6.0拥有众多的函数计算类库,其数据计算能力比较突出,因此选用VC++6.0作为应用软件开发环境。
(2)无人机动力学模型建立
无人机动力学模型的建立是飞行系统模拟的基础,根据参考文献,建立无人机动力学模型。
(3)风干扰和力矩干扰的加载
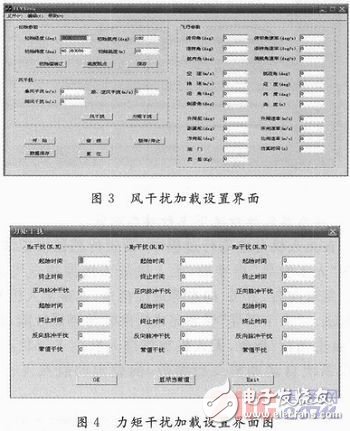
风干扰模拟主要是将风速、风向分解投影到各机体轴上,再结合空气动力学方程组里的三向速度方程,解算出三向速度,代入动力学模型中解算后得到加入风干扰后的飞机姿态参数。力矩干扰的加载方法采取直接设置动力学模型中相应参数的方式。设置内容包干扰力矩、正向和反向脉冲干扰、起始时间、终止时间以及常值力矩的大小等。
(4)应用软件的实现
应用软件完成后,为防止在其他分系统软件编程过程中产生的误修改,无人机模型采用动态链接库的方式向提供(UAVSimu.DLL),通过干扰设置界面完成外加力矩的设置,如图3,图4所示。
3.2 传感器与机载测控模拟分系统
可以模拟GPS接收机、磁航向、大气数据计算机等传感器特性,通过数字或模拟信号的形式输出到各相关分系统,供实际平台仿真使用。可设置的故障类型包括:
GPS接收机失效、航向跳变、大数据计算机高度跳变。
(1)应用软件开发环境的选择
由于该应用软件在设计过程时需要进行大量的软件界面开发,而Borland公司的C++Builder集成开发环境的最大优点在于其软件界面开发过程中的直接拖入方式,极大地方便了工程开发。因此选用C++Builder进行应用软件开发。
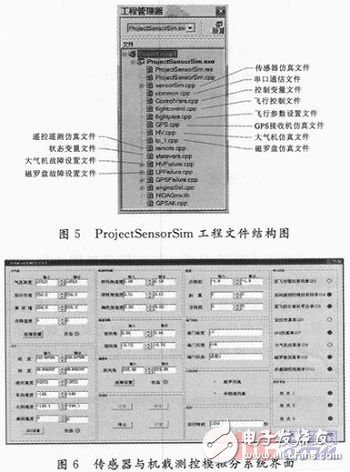
(2)软件总体设计构建
建立一个“ProjectSensorSim”的工程文件,包括如图5所示的工程文件,运行该工程文件后,生成分系统软件界面,如图6所示。
3.3 遥控/遥测模拟分系统
该分系统用于模拟地面测控站基本功能,用于完成遥控指令的发送、遥测数据的接收。软件采用模块化设计,包括二维曲线绘制、航路装订、保存与删除、航迹绘制、串口处理、遥测数据接收、遥测信息处理、遥控指令处理等模块。
3.4 无人机外形显示分系统
外形显示分系统采用VC++2010软件,基于OpenGL进行开发。软件模块包括:通信接口模块、三维演示模块、仪表显示模块等。
3.5 软件开发过程中的两个关键问题
(1)降低系统间通信时间延迟技术
由于采用分布式、模块化结构,各分系统之间通过串口通信,难免会产生通信时延问题,在软件设计过程中采取了如下措施进行解决:
①减小飞行系统模拟软件的仿真步长,增加了飞行参数的连续性;
②提高飞行系统模拟、传感器与机载测控模拟与飞控计算机模拟三个分系统之间的姿态信息传输的串口波特率;
③优化传感器与机载测控模拟分系统与其他分系统之间串口数据通信的帧结构;确保姿态信息以最短的时间到达飞控计算机。
(2)工控设备数据实时性处理技术
由于传感器与机载测控模拟分系统采用工控机架构,需要同时与飞行系统模拟等多个分系统等进行数据通信,所有的任务均要求在毫秒级完成。在软件设计中,采用在Windows环境下应用Multimedia Timer(多媒体定时器)结合多线程来实现。应用多媒体定时器是计算机从硬件上支持的精确定时器,其定时误差一般可达到十微秒级,完全可以满足实时性要求。
4 平台功能测试验证
4. 1 飞控系统仿真测试功能验证
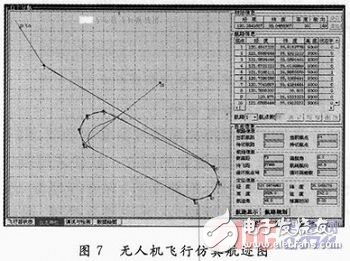
按图1连接平台各个组成部分,运行各应用软件,进行全系统基本功能测试。测试结果如图7所示。无人机能够按照预先装订的航路完成飞行仿真;遥控/遥测模拟软件能实时显示无人机的姿态信息、传感器模拟信息等,以二维曲线和状态指示灯的方式直观显示;以三维动画的方式逼真显示无人机飞行过程中的姿态、高度变化情况。
4.2 干扰条件下飞行性能模拟功能测试
(1)风干扰模式下的仿真
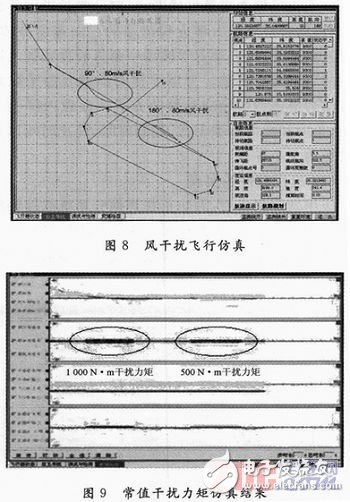
在飞行系统模拟分系统中,通过“风干扰”功能按钮,分别设置风干扰为正北向90°,80 m/s和正北向180°,80 m/s,观察无人机飞行仿真航迹变化情况,如图8所示。可以看到,无人机受到风干扰后,航迹短时发生了明显变化,之后飞控系统能够及时纠正航路偏差,使无人机按照预定航路飞行。
(2)干扰力矩作用下的仿真
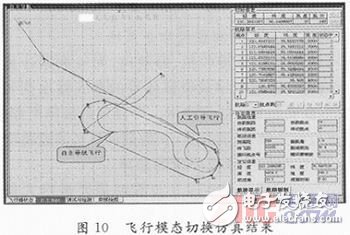
在飞行系统模拟分系统中,分别设置外部干扰为1000 N·m和500 N·m的常值干扰力矩,观察无人机在此干扰情况下的仿真情况,如图9所示。由图可以看出,不同力矩作用下的无人机各舵偏角和舵偏角速率大小。在施加干扰力/力矩情况下,无人机姿态发生了明显变化,随之飞控系统通过不断调整舵偏角和舵偏角速率来消除外加干扰的影响,保证无人机能够按照预定的姿态正常飞行。
4.3 传感器故障情况下飞行模态测试
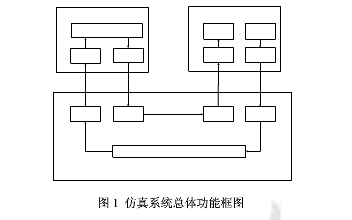
在无人机自主飞行过程中,设置传感器模拟故障,发送“人工引导”指令后,无人机进入遥控指令飞行模态。发送向右、直飞、向左等遥控指令,观察无人机的飞行航迹。“人工引导”模态完成后解除传感器故障,再发送“自主飞行”指令,无人机重新进入自主飞行状态,由飞控系统自动调整飞行参数,向设定的航点飞行,如图10所示。
5 结语
本文介绍了无人机飞控系统半物理仿真平台的基本功能、总体技术方案、硬件选型方案和软件设计方案。最后,对平台的基本功能进行了测试验证。该平台不仅可以用于飞控系统的仿真测试,还可以进行无人机飞行规律研究、飞行性能评估、操控人员模拟训练等。










 工商网监
工商网监
评论