简单来说,SLAM是指机器人依靠自身传感器在未知环境中获得感知信息,递增地创建周围环境的地图,同时利用创建的地图实现自主定位。
2016-02-16 11:38:36 20515
20515 10G以太网光口与高速串行接口的使用越来越普遍,本文拟通过一个简单的回环实验,来说明在常见的接口调试中需要注意的事项。各种Xilinx FPGA接口学习的秘诀:Example Design。欢迎探讨
2020-11-18 17:43:485295 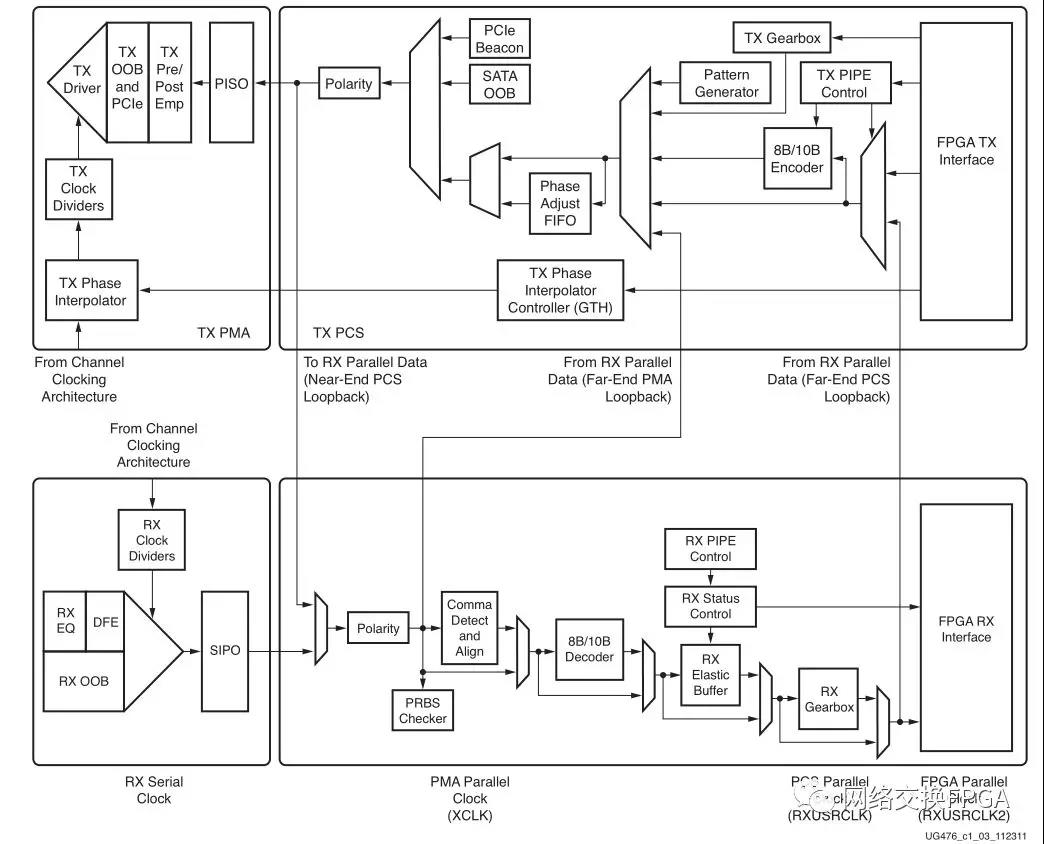
在高速系统中FPGA时序约束不止包括内部时钟约束,还应包括完整的IO时序约束和时序例外约束才能实现PCB板级的时序收敛。因此,FPGA时序约束中IO口时序约束也是一个重点。只有约束正确才能在高速情况下保证FPGA和外部器件通信正确。
2022-09-27 09:56:091384 本文的优势不仅包括讨论A-SLAM的内部组成部分,还包括其应用领域、局限性和未来前景,以及对过去十年A-SLAM进行全面的统计调查。
2023-03-17 10:44:57504 根据ASIC逻辑设计,优化的约束是速度和面积。在物理设计中,我们需要对面积、速度和功率进行优化设计。根据所需的技术节点和策略进行更好的功耗规划,总是有助于获得芯片的布局。
2023-07-11 09:31:43353 
挑战性的任务。本文提出了一种新的基于正态分布变换(NDT)的实时三维SLAM方法,该方法利用姿态图优化和回环检测来进一步提高mapping的一致性。我们创新地提取巷道中的地板和墙壁作为平面节点来构建地标约束,此外还通过无损检测应用激光雷达里程
2023-08-16 10:14:491048 
上周的组会上,我给研一的萌新们讲解什么是SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上周的组会汇报总结一下。 这次汇报的题目我定为“视觉SLAM:一直在
2023-08-21 10:02:071574 
I/O约束(I/O Constraints)包括I/O标准(I/OStandard)约束和I/O位置(I/O location)约束。
2023-11-18 16:42:28507 
在进行布局约束前,通常会对现有设计进行设计实现(Implementation)编译。在完成第一次设计实现编译后,工程设计通常会不断更新迭代,此时对于设计中一些固定不变的逻辑,设计者希望它们的编译结果
2024-01-02 14:13:53434 
LSD-SLAM 即 Large-Scale Direct SLAM,兼容单目相机和双目相机。LSD-SLAM是一种基于光流跟踪的直接法SLAM,但是实现了半稠密建图,建图规模大,可以在线实时运行。
2024-02-26 09:41:50272 
SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。 其实,SLAM≠机器人自主定位导航 ,不解决行动问题。 SLAM如其名一样,主要解决的是机器人的地图构建
2018-08-24 16:56:24
常有必要的 。 回环检测失败 如何提升机器人回环检测能力? 那么,怎么才能让机器人的回环检测能力得到一个质的提升呢?首先要有一个算法上的优化。 1. 基于图优化的SLAM算法 基于图优化
2019-03-06 15:38:04
上升,SLAM导航迎来了广阔的市场。将SLAM运用在AGV物流小车上,可以不用预先铺设任何轨道,方便工厂生产线的升级改造和导航路线的变更,实时避障,环境适应能力强,同时能够更好地实现多AGV小车的协调
2018-12-06 10:25:32
作为辅助。 AR AR通过电脑技术,将虚拟的信息应用到真实世界,真实的环境和虚拟的物体实时地叠加到了同一个画面或空间同时存在。这一画面的实现,离不开SLAM技术的实时定位。虽然在AR行业有很多可代替技术,但是,SLAM技术是最理想的定位导航技术。
2020-12-01 14:26:37
研究生期间进行了基于2D激光雷达的SLAM的研究,当时主要做了二维激光雷达的数据处理。小弟不才,没有入得了SLAM的坑,却一直谜之向往,如今得以机会,决定正式迈出第一步,彻底进入SLAM的坑!心中
2021-08-30 06:13:31
本帖最后由 小芳 于 2012-2-27 15:41 编辑
想问下系统时钟约束是什么情况啊?是不是在这里设置下?
2012-02-27 15:41:31
我使用AD9361器件,在数字输入接口自回环,发现自增数回环正常,正弦波回环错误。不明白问题原因!
2023-12-04 06:22:21
移动机器人自主能力和环境适应能力,实现在未知环境中进行自主定位和导航。SLAM运用在AGV物流小车上,可以不用预先铺设任何轨道,方便工厂生产线的升级改造和导航路线的变更,实时避障,环境适应能力强,更好
2018-11-09 15:59:01
AT32F系列 CAN回环模式使用演示AT32F系列CAN回环模式的使用方法。
2023-10-27 06:05:31
不懂回环模式是什么
2024-02-20 07:19:55
最近想做一个回环实验,通过FPGA板实现,但是不知道该怎么做。求得为大神给小弟指点迷津。{:soso_e163:}
2012-07-11 12:05:31
是一项浩大的工程,这标志着设计者能够完全控制设计的物理实现。这是一个理想目标,是不可能在有限的时间内完成的。通常的做法是设计者对设计的局部进行寄存器布局约束并通过实际运行布局布线工具来获得时序收敛
2016-06-02 15:54:04
通过对设计施加精准的控制来获得可靠的时序收敛结果。对设计中的每一个寄存器手工进行布局位置约束并保证时序收敛是一项浩大的工程,这标志着设计者能够完全控制设计的物理实现。这是一个理想目标,是不可能
2017-12-27 09:15:17
Intelligent Vehicles Applications1. 介绍2. HOOFR-SLAM2.1 系统框架2.2 HOOFR特征提取2.3 映射线程2.3.1 特征匹配1. 介绍提出一种HOOFR-...
2021-12-21 06:35:49
STM32如何快速实现USB虚拟串口+回环测试+USB转TTL的功能?
2021-12-08 06:20:52
本文主要介绍说明XQ6657Z35-EVM评估板Cameralink回环实现例程的功能、使用步骤以及各个例程的运行效果。(基于TI KeyStone架构C6000系列TMS320C6657双核
2023-02-24 10:00:56
申请理由:本人是江南大学机械工程机电检测与控制研究中心在读研究生,正在做变约束连杆机械手控制系统的设计研究,为提高系统的智能程度,也为了更好的学习ARM编程技能,希望可以使用该产品。项目描述:主要
2015-12-02 16:06:26
题目:基于SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
基于视觉的slam自动驾驶,这是我们测试的视频《基于slam算法的智能机器人》调研分析报告项目背景分析机器人曾经是科幻电影中的形象,可目前已经渐渐走入我们的生活。机器人技术以包含机械、电子、自动控制
2021-08-09 09:37:34
如何实现基于RK3399开发板的cartographer激光SLAM建图模块的设计?
2022-03-07 07:05:11
安全气囊在辅助约束系统(SRS)中发挥着至关重要的作用。目前,乘用车安装安全气囊已经成为一种标准。大家都知道在汽车发生碰撞时,安全气囊和安全带可降低乘员头部和上身撞击车内部件的几率。它们还可通过使
2018-12-10 10:01:08
本文提出的通过微处理器加FPGA结合串行菊花链实现可重构的方式,实现了动态可重构FPGA结构设计的一种应用。
2021-05-10 06:22:19
大家好,我想学习SLAM技术有资深的老师愿意教我吗?qq:496397940
2018-11-09 13:42:27
服务机器人想要自由行走,实现自主定位导航是关键,自主定位导航包括定位、建图与路径规划。SLAM作为机器人定位导航的核心技术,正不断获得行业内的重视,但SLAM只是完成定位与地图创建这两件事,它并不
2018-10-10 16:29:21
什么是回环检测?在讲解回环检测前,我们先来了解下回环的概念。在视觉SLAM问题中,位姿的估计往往是一个递推的过程,即由上一帧位姿解算当前帧位姿,因此其中的误差便这样一帧一帧的传递下去,也就是我们
2018-10-23 17:47:22
SLAM主要解决机器人的实时定位与自动建图问题,那么,在实际应用时,SLAM究竟是如何实现的呢?在实现过程中有哪些难点?这是一个完整的SLAM和导航系统的主要架构图:其中,SLAM核心过程包括3个
2017-06-30 15:05:26
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
2020-05-20 08:19:40
在机器人运动控制系统架构中,可分为最底层、中间通信层和决策层三大层面,最底层包含了机器人本身的电机驱动和控制部分,中间通信层是底层部分和决策层的通信通路,而决策层则是实现机器人的定位建图及导航。在
2021-07-05 06:41:57
什么是激光SLAM?视觉VSLAM又是什么?激光SLAM和视觉VSLAM有哪些不同之处?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
[get_cellsswitch_v2_i/srio_clk_inst/srio_mmcm_inst]2. 块布局约束通过增加非关键块的逻辑密度来节省布局布线资源、提高性能。通过更好的放置来减少所选逻辑的路由延迟
2018-09-26 15:32:20
【总结】视觉SLAM笔记整理
2020-07-17 14:05:20
抖动,必要时调整 ▲ SLAM 3.0 ——采用图优化的SLAM方式 SLAM 3.0 相比较于前两代,采用图优化方式进行构图,能实现百万平米级别的地图构建能力,同时拥有主动式回环闭合纠正能力,能
2019-01-21 10:57:46
在PIC32MX1/2家族的IO规范中(表30-8),VIL_MAX和VIH_MIN根据IO是否“具有PMP”而不同。“IO与PMP”是否意味着PIN是可MPMP的,或者PIN是否与PMP功能一起使用?
2019-08-02 10:50:03
物理约束文件ADC可做哪些约束?
2023-08-11 08:37:29
实现单目视觉同时定位与建图(SLAM)仿真系统,描述其设计过程。该系统工作性能良好,其SLAM算法可扩展性强,可以精确逼近真实单目视觉SLAM过程。以方便SLAM算法的研究为目标,提
2009-04-15 08:50:37 82
82 本文针对当前权限控制框架在权限控制和数据保护方面存在的问题,提出一种新的权限控制解决方案——基于RBAC 的限制约束扩展。文章重点描述了限制约束功能的原理与实现
2010-01-15 16:08:026
600VIL4216 700VIL4217 800VIL4218电路原理电路图
2009-07-01 10:58:59386 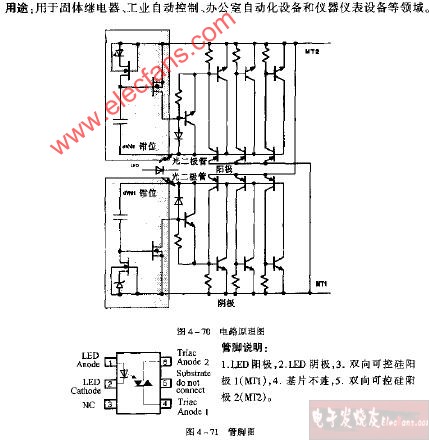
600VIL4216 700VIL4217 800VIL4218管脚电路图
2009-07-01 10:59:36394 
xilinx 约束实现
2017-03-01 13:12:4715 十天学会LM4F232——串口回环
2017-10-27 15:16:476 XDC中的I/O约束虽然形式简单,但整体思路和约束方法却与UCF大相径庭。加之FPGA的应用特性决定了其在接口上有多种构建和实现方式,所以从UCF到XDC的转换过程中,最具挑战的可以说便是本文将要
2017-11-17 19:01:006666 
作为赛灵思用户论坛的定期访客(见 ),我注意到新用户往往对时序收敛以及如何使用时序约束来达到时序收敛感到困惑。为帮助 FPGA设计新手实现时序收敛,让我们来深入了解时序约束以及如何利用时序约束实现
2017-11-24 19:37:554903 
程序简介 -工程名称:CAN回环测试 -实验平台: 秉火STM32 F429 开发板 -MDK版本:5.16 -ST固件库版本:1.5.1 【 !】功能简介: 使用CAN回环模式进行通讯实验。 学习
2017-12-13 15:35:1430 、帧间配准、位姿变换估计以及闭环检测对SLAM系统的影响,建立了关键帧闭环匹配算法和SLAM实时性与鲁棒性之间的关系,提出了一种基于ORB关键帧匹配算法的SLAM方法。运用改进ORB算法加快了图像特征点提取与描述符建立速度;结合相机模型与深度信息,
2018-03-26 10:57:326 高仙的SLAM2.0技术体系核心,是基于多传感器融合+深度学习的架构,即语义SLAM。高仙SLAM2.0技术方案以语义分析、机器学习为基础,结合云端实时信息处理以及专为多传感器融合而开发的专业算法体系,真正实现了SLAM在建图和导航两个环节的完整应用。
2018-05-15 16:48:308535 介绍FPGA约束原理,理解约束的目的为设计服务,是为了保证设计满足时序要求,指导FPGA工具进行综合和实现,约束是Vivado等工具努力实现的目标。所以首先要设计合理,才可能满足约束,约束反过来检查
2018-06-25 09:14:006374 SLAM要实现定位和制图,第一步就是采集数据,而采集数据的关键就是传感器,可以说没有传感器就没有SLAM。而SLAM上的传感器种类多样,目前主流的我们可以将其分为两大类:激光雷达和摄像头。
2018-07-17 16:59:0232392 大概从几个方面来讲一下SLAM的实现和应用:第一个是从传感器的角度,第二个是从算法实现的角度,第三个是从搭载硬件传感器平台上来说这些问题。
2018-09-15 10:26:4012330 物理优化是Vivado实现流程中更快时序收敛的重要组成部分。
了解如何在Vivado中应用此功能以交换运行时以获得更好的设计性能。
2018-11-23 06:06:003728 本文是调研视觉SLAM中的实现方法的总结,包括三方面内容:姿态计算、闭环检测、BA优化。
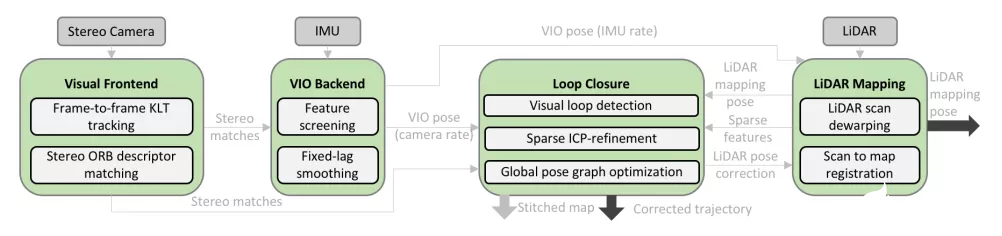
2019-05-18 11:49:014037 近年来SLAM系统与其他传感器的融合成为了一大热点。
2019-05-24 09:45:0612481 显著地减小累积误差。回环检测实质上是一种检测观测数据相似性的算法。对于视觉SLAM,多数系统采用目前较为成熟的词袋模型(Bag-of-Words, BoW)。词袋模型把图像中的视觉特征(SIFT
2019-08-09 17:31:201430 显著地减小累积误差。回环检测实质上是一种检测观测数据相似性的算法。对于视觉SLAM,多数系统采用目前较为成熟的词袋模型(Bag-of-Words, BoW)。词袋模型把图像中的视觉特征(SIFT
2019-09-11 22:01:351759 垫标准+和垫专业使用的强大和易于使用的约束管理系统创建、评审和验证PCB设计约束。
2019-11-04 07:02:001445 我需求将FPGA处理的视频数据通过USB发送给电脑,先实现一个小目标,做一个简单的数据回环。
2019-10-27 10:35:271260 如今科技发展日新月异,诸如机器人、AR/VR等前沿科技产品已走入了大众生活当中。但是想在这些领域让用户有更好的体验,就需要很多底层技术的支持,SLAM就是其中之一。如果说机器人离开了SLAM
2020-04-17 09:21:4153848 SLAM作为机器人自主定位导航的重要突破口正不断引起业内重视,它是实现机器人自主行走的关键技术,可帮助机器人实现即时定位与地图构建,在实际应用中,SLAM技术究竟又是如何实现的呢?一起来探个究竟
2021-10-14 14:35:091405 SLAM作为机器人自主定位导航的重要突破口正不断引起业内重视,它是实现机器人自主行走的关键技术,可帮助机器人实现即时定位与地图构建,在实际应用中,SLAM技术究竟又是如何实现的呢?一起来探个究竟。
2020-12-26 09:23:19569 在SLAM系统中增加更多的相机可以提高鲁棒性和准确性,但会使视觉前端的设计变得非常复杂。因此,文献中的大多数系统是为特定的相机配置定制的。在这项工作中,我们的目标是一个适用于任意多相机设置的自适应
2021-01-07 11:51:061792 ,使重釆样后的粒子保持多样性。结合似然域模型与意外对象观测概率,使激光测量模型更好地反映真实环境。实验结果表明,改进的重釆样方法定位效果较好,相对原激光SLAM算法,改进的激光SLAM算法在动态环境中的建图和定位精度更高。
2021-04-01 10:48:316 传感器读取数据后,视觉里程计估计两个时刻的相对运动(Ego-motion),后端处理视觉里程计估计结果的累积误差,建图则根据前端与后端得到的运动轨迹来建立地图,回环检测考虑了同一场景不同时刻的图像,提供了空间上约束来消除累积误差。
2021-04-14 13:36:215670 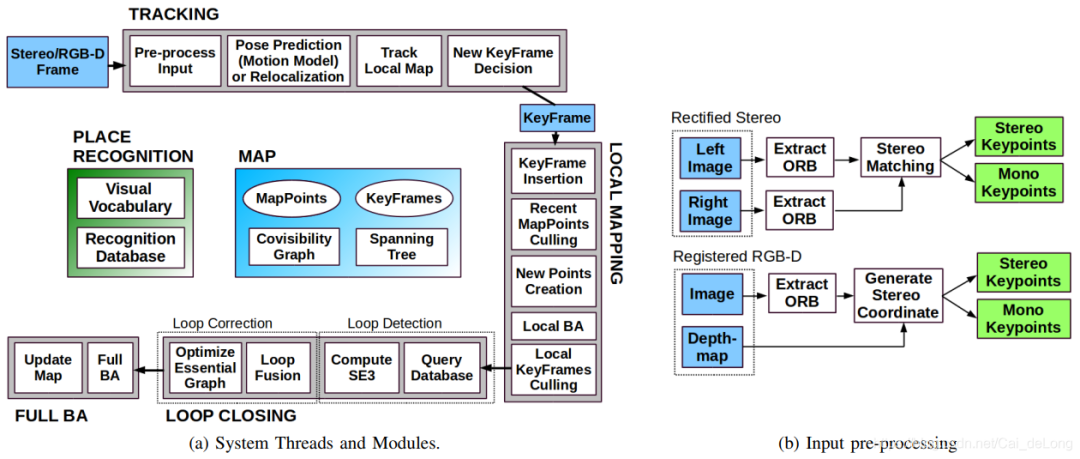
课题组已将该研究成果应用于智能驾驶即时定位与建图(SLAM)任务中,提出了基于三维激光数据的层级式SLAM方法,实现了无GNSS环境下智能无人系统的高精度自主定位定姿,在智能驾驶国际著名公开数据集KITTI上排名全球第7(纯激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
可进入的每个角落。SLAM最早由Smith、Self和Cheeseman于1988年提出。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。 词语
2021-08-26 16:07:316792 linux spi应用层驱动以及回环测试代码
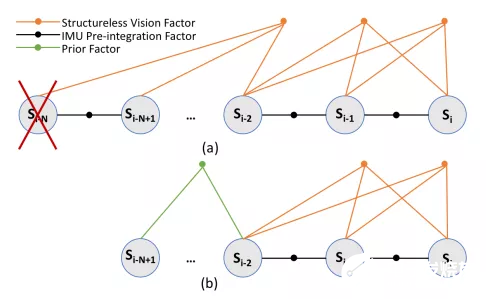
2021-10-22 15:47:362 本文为作者在从事Slam相关工作中对这几年遇到以及改进过相关VIO算法内容总结。 1.背景介绍 一个完整的 SLAM(simultaneous localization and mapping
2021-11-03 09:45:172078 
./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 (1) LT-SLAM, 在LT-SLAM模块中,Kim团队利用multi-session SLAM,基于激光雷达的global localizer实现回环检测,以此内部联合优化多个
2022-10-09 15:01:391292 目前视觉SLAM回环检测主要方式有传统的词袋模型以及基于概率和词袋模型的一些改进算法,但是传统方式依然存在过多的人工干预,对于场景中动态对象的处理不是十分理想,并且计算量较大,响应比较慢。而深度学习技术的出现及发展在回环检测问题的解决上提供了新的方向。
2022-11-09 12:38:211364 视觉SLAM是一种基于视觉传感器的 SLAM 系统,与激光传感器相比,视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。
2022-11-29 21:38:37627 (Visual SLAM,VSLAM)是将图像作为主要环境感知信息源的SLAM系统,VSLAM以计算相机位姿为主要目标,通过多视几何方法构建3D地图[4]
2022-12-02 15:00:281149 手持SLAM设备最大的特点肯定要放到手持这个动作上面,由于SLAM算法的优越性,手持可以做到走到哪里测到哪里。
2022-12-27 10:43:413282 Lego-LOAM是基于轨迹位姿方法的回环检测,使用KDtree寻找当前位姿的历史最近位姿,之后把历史位姿作为候选,用ICP算法修正位姿。
2023-01-11 09:12:591630 示例中采用的是“硬约束”,因为定义在类中的约束与随机时指定的内嵌约束“矛盾”,所以导致约束解析器解析随机失败,即“硬约束”要求所有相关的约束条件不能互相矛盾,否则将会随机失败。
2023-03-15 16:56:582541 视觉里程计最近几年越来越受到学术界以及工业界的认可,以ORB和VINS为代表的视觉SLAM已经可以满足绝大多数场景,而OV2SLAM在其他VSLAM中脱颖而出,其实时性以及具体的回环性能在测试中都得到了认可。
2023-03-21 17:16:31768 与ORB-SLAM2相比,ORB-SLAM3在处理大视差和长时间未观测到的场景时效果更好。它还提供了更准确的帧间运动估计和更快的处理速度。
2023-06-19 09:28:121967 
根据ASIC逻辑设计,优化的约束是速度和面积。在物理设计中,我们需要对面积、速度和功率进行优化设计。根据所需的技术节点和策略进行更好的功耗规划,总是有助于获得芯片的布局。
2023-07-09 11:28:33334 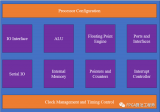
激光雷达是最古老,研究也最多的SLAM传感器。它们提供机器人本体与周围环境障碍物间的距离信息。常见的激光雷达,例如SICK、Velodyne还有我们国产的rplidar等,都可以拿来做SLAM。激光雷达能以很高精度测出机器人周围障碍点的角度和距离,从而很方便地实现SLAM、避障等功能。
2023-08-16 10:31:081895 
传统的同步定位与制图(SLAM)系统使用环境的静态点作为实时定位和制图的特征。当可用的点特征很少时,系统很难实现。一个可行的解决方案是引入线特征。在包含丰富线段的复杂场景中,线段的描述差别不大,这可
2023-09-01 17:16:29314 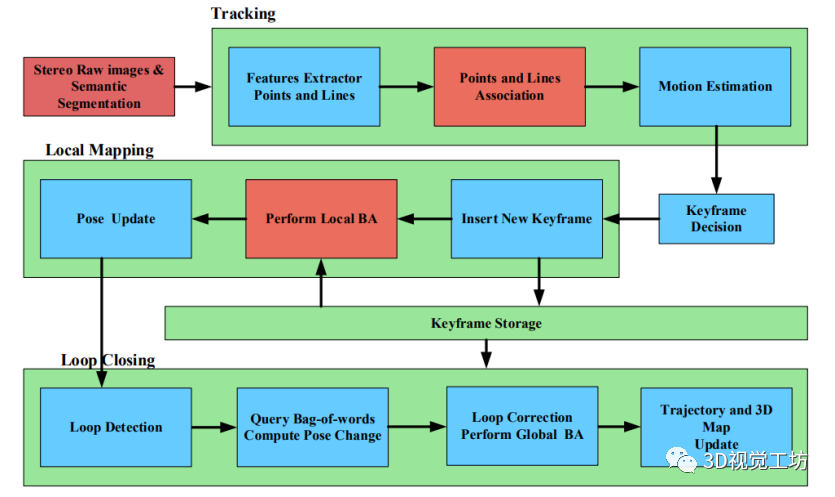
近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM,但也是目前研究的一大热点,今天我们就来详细聊聊视觉SLAM的那些事儿。
2023-09-05 09:31:111381 
GO-SLAM主要还是基于NeRF进行稠密重建,可以发现相较于NICE-SLAM这些SOTA方案,GO-SLAM重建场景的全局一致性更好,这主要是因为它引入了回环和全局BA来优化累计误差。
2023-09-11 10:03:29685 
相似结构一直是SLAM和SfM中很难处理却又不得不处理的问题,如果机器人遇到了非常相似但实际不同的结构,很容易因为匹配数量足够多而引发假阳性回环和重建失败。传统方法更多的还是利用匹配数量的阈值或者和其他几何关系的比值阈值来判断,这种方法在遇到高对称结构时很容易失败。
2023-09-20 15:15:26352 
理解,SLAM的主要功能就是让机器人一边计算自身位置,一边构建环境地图,这两个过程相辅相成。可以说,SLAM技术是机器人后续自主行动和实现交互的基础,SLAM也被认
2023-11-25 08:23:57999 
提出了一种基于RGB-D图像序列的协同隐式神经同步定位与建图(SLAM)系统,该系统由完整的前端和后端模块组成,包括里程计、回环检测、子图融合和全局优化。
2023-11-29 10:35:18189 
 德赢Vwin官网
App
德赢Vwin官网
App









 工商网监
工商网监
评论