 德赢Vwin官网
App
德赢Vwin官网
App


一、前言
随着汽车市场的保有量连续多年的高速增长,人们对于汽车驾驶安全技术的要求也越来越高,尤其是主动安全技术。无论是如今应用广泛的防抱死系统(Antilock Brake System,ABS)、车身电子稳定系统(Electronic Stability Program,ESP),还是逐渐兴起的高级驾驶辅助系统(Advanced Driver Assistance System,ADAS), 汽车防撞预警系统(Forward Collision Warning System,FCWS),都需要准确地获取当前轮速,或者通过汽车ECU对轮速信号进行逻辑计算估算出汽车速度。
本文主要是对市场主流的轮速传感器工作原理和信号特征进行分析说明,在此基础上,针对性地对轮速传感器应用进行实例介绍,同时对轮速传感器的发展做出展望。
二、轮速信号的采集
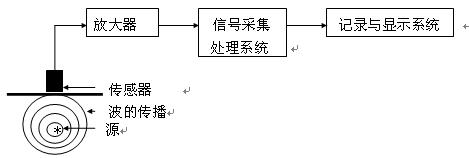
轮速信号的采集过程实际上可以看作是对旋转件的测速过程。转速测量常用的光电式、电涡流式和电磁式等也曾应用于汽车轮速信号的测量。相比较而言,电磁式轮速传感器工作可靠,价格合适,受环境因素(如温度、灰尘等)的影响较小,基于以上优点,电磁式轮速传感器在轮速信号的采集中应用广泛。
电磁式轮速传感器大致分为电感式、霍尔式和磁阻式三种类型。其中,电感式轮速传感器是被动式轮速传感器,又称无源轮速传感器;相对应的,霍尔式和磁阻式轮速传感器是主动式轮速传感器,也称有源轮速传感器,有一个电源电路为传感器提供外部电压供电,在外部供电无法提供时,主动式轮速传感器将无轮速信号产生。
1、电感式轮速传感器
电感式轮速传感器基于电磁感应原理,利用电磁感应把被测对象的运动转换成线圈的自感系数和互感系数的变化,再由电路转换为电压或电流的变化量输出,实现非电量到电量的转换。由电磁感应定律可知,通过回路面积的磁通量发生变化时,回路中会产生感应电动势,如公式(1)所示:
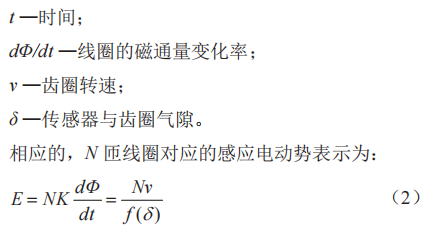
由式(1)、(2)可见,磁通量的变化决定了感应电动势的输出,磁通量的变化频率决定了感应电动势的输出频率。电感式轮速传感器工作原理结构如图1所示。
当车轮运动时,齿圈随半轴转动,齿圈的齿形变化引起齿圈与永久磁铁间隙的变化,继而对磁通量造成影响,感应线圈中的感应电动势随之变化。通过对输出电势的频率统计,可知车轮转速为:

P —系数,一般根据单位调整;
f —感应电动势频率;
z —齿数。
2、霍尔式轮速传感器
霍尔式轮速传感器基于霍尔效应,由霍尔组件结合电子元件组成,霍尔元件外加与电流方向垂直的磁场,在霍尔元件的两端会产生电势差,即霍尔电势差。

式中,I —输入电流;B —磁感应强度;n —自由电子浓度;e —电子电荷量;d —霍尔元件厚度;KH —霍尔系数,定义霍尔元件的灵敏度,仅与元件材料有关,为一常量。
由式(4) 可 见,UH、I和B三者确定其中两个,另一个参数也就确定。
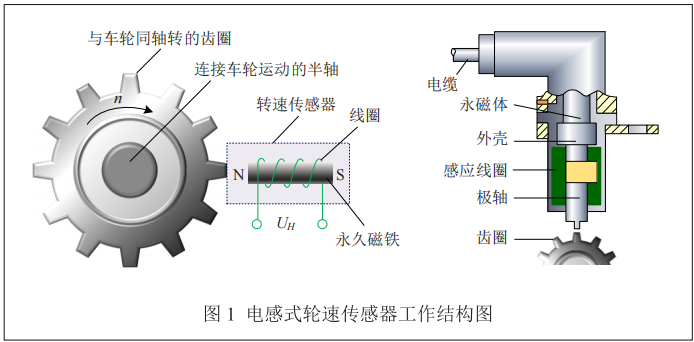
值得注意的是,自由电子浓度 n 受温度影响较大,要注意消除温度变化造成的影响。霍尔式轮速传感器工作原理结构如图2所示。
具有磁化轨道的转轴或磁性轴用于产生磁场,永久背磁用于产生偏转磁场。A和B可统称为编码器。
车轮运动时,编码器转动,霍尔式轮速传感器检测到编码器的磁通量的大小变化。通常传感器内部包含两个霍尔元件,运动过程中产生具有一定相位差的波形,两波形经差分放大,实现精度和灵敏度的提高。
车轮转速也可用式(3)表示,其中 f 表示为霍尔电压的信号频率。
3、磁阻式轮速传感器
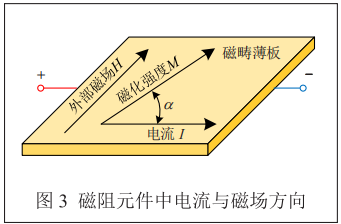
可变磁阻式轮速传感器基于磁阻效应,与霍尔效应类似的是,在磁阻效应元件上接通电流和通过磁场,这里的磁场与电流成角度 α 设置,如图 3,这样磁场耦合到磁阻效应元件(一般为铁磁材料制作的薄板,称之为韦斯磁畴)方向的磁通量的变化率发生变化,从而改变元件的电阻(系数)。
当外部磁场与磁阻元件中的电流之间的夹角 α 发生变化时,磁阻元件电阻 R 变化,有:
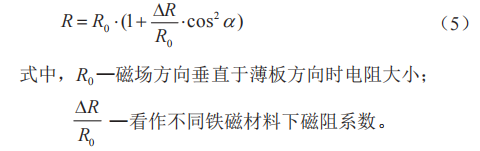
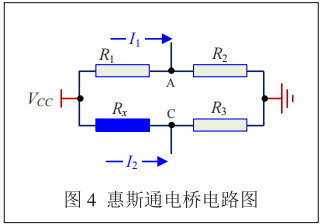
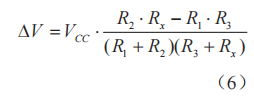
图4中可以看到,当 α=90° 时,磁阻元件电阻 R最小;当 α=180°(0°)时,磁阻元件电阻 R 最大。磁阻元件一般后接电桥进行信号处理,惠斯通电桥如图 4。磁阻元件做为Rx,根据电桥原理,Rx 的变化引起 R1 和 R3 两端电压差 ΔV 的变化,通过对 ΔV 实现对 Rx 变化率的放大。
与霍尔元件的信号处理类似,当需要消除零点漂移时可以做差分处理,磁阻元件可以通过添加磁阻元件以及调整电桥结构进行差分放大,一般常用的是采用六桥结构。
车轮转速也可用式(3)表示,其中,f 表示为霍尔电压的信号频率。
三、轮速信号的处理
轮速信号采集后,还需要进行限幅、滤波等信号处理,从而使汽车 ECU 能够使用更稳定有效的轮速信息。
1、轮速信号类型
轮速信号采集后,首先要区分轮速信号类型。输出信号类型主要有以下四种,如图5所示。
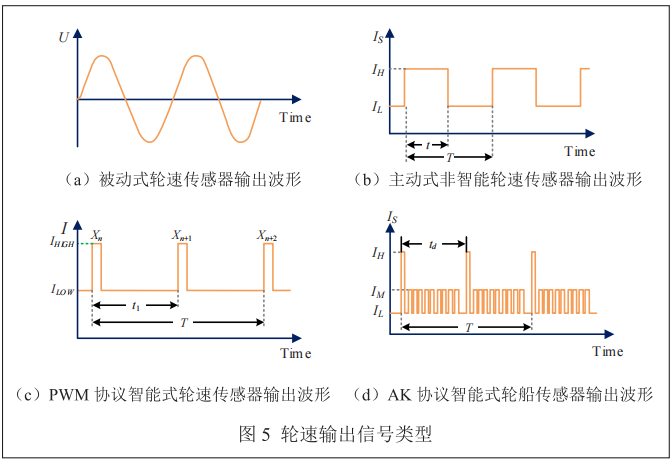
图5(a)中表示被动式轮速传感器的输出波形,这是一种类似于正弦波的波形,其频率、幅值的变化与气隙(传感器测试端外表面与靶目标间的距离)和编码器的旋转频率有关。如某轿车实验过程中,当气隙固定为0.8mm,在车速为15km/h 时,轮速传感器输出信号频率95Hz左右,电压幅值0.5V左右;在车速为1205km/h 时,轮速传感器输出信号频率761Hz 左右,电压幅值5.3V左右。
图5(b)、(c)、(d)中表示主动式轮速传感器的输出波形,一般采用霍尔元件或磁阻元件。
图 5(b)表示高低电流交替进行的方波信号。一般来说,在传感器允许的气隙范围内,方波信号的参数是基本一致的,或者说是有效的。这里的参数主要包括高电流 IH、低电流 IL 和占空比 t/T(一般为 50%),参数有效体现在数值处于一定区间内,这主要是由芯片性能确定,一般要求 IH 处于11.5mA~16.8mA,IL 处 于 5.7mA~9.6mA,占空比30%~70%。输出参数稳定有效,与轮速传感器相连接的处理单元才能够有效识别出轮速。
图5(c)、(d)中的传感器相当于图5(b)中传感器的升级版,表现在通过一定的方式体现出转速外更多的信息。
图5(c)中方波Xn的脉宽相对于半周期t1较窄(这里要注意的是:相对于图 5(b),PWM协议传感器占空比也是50%的上下区间,但不是tx/t1,而是 t1/T),这是该类传感器通过脉宽调制的方式输出额外信息,包括安装气隙的变化、车轮的正反转以及其他的警告信息。
图5(d)中的电流输出多出了一系列电流方波,这一类传感器通过电流方波组成的序列提供了附加信息,包括气隙储备、车轮正反转等。相对于PWM协议的轮速传感器,AK 协议的轮速传感器面对接近静止的低速情况下,以及静止情况(轮速为0)下具有更好的信息,体现在静止情况下,AK协议中的轮速方波消失,但是后面9位的信息方波依然能够输出。
图5(c)、(d)中的方波类型我们统称为数据图5(b)表示高低电流交替进行的方波信号。一般来说,在传感器允许的气隙范围内,方波信号的参数是基本一致的,或者说是有效的。这里的参数主要包括高电流IH、低电流IL和占空比t/T(一般为 50%),参数有效体现在数值处于一定区间内,这主要是由芯片性能确定,一般要求IH处于11.5mA~16.8mA,IL处于5.7mA~9.6mA,占空比30%~70%。输出参数稳定有效,与轮速传感器相连接的处理单元才能够有效识别出轮速。
图5(c)、(d)中的传感器相当于图5(b)中传感器的升级版,表现在通过一定的方式体现出转速外更多的信息。图5(c)中方波 Xn 的脉宽相对于半周期t1较窄(这里要注意的是:相对于图5(b),PWM 协议传感器占空比也是50% 的上下区间,但不是 tx/t1,而是 t1/T),这是该类传感器通过脉宽调制的方式输出额外信息,包括安装气隙的变化、车轮的正反转以及其他的警告信息。
图5(d)中的电流输出多出了一系列电流方波,这一类传感器通过电流方波组成的序列提供了附加信息,包括气隙储备、车轮正反转等。相对于PWM协议的轮速传感器,AK 协议的轮速传感器面对接近静止的低速情况下,以及静止情况(轮速为0)下具有更好的信息,体现在静止情况下,AK协议中的轮速方波消失,但是后面9位的信息方波依然能够输出。
图5(c)、(d)中的方波类型我们统称为数据协议,具有数据协议的轮速传感器最大的优点是能够判定车轮的正反转,这大大提高了轮速传感器在智能方面的应用,如车辆驾驶状态的判断和应用相关的主动安全技 术, 包 括 电 子 驻 车(Electrical Parking Brake,EPB)、坡道辅助技术(Hill-start AssistControL,HA C)。随着汽车智能化程度的不断提高,自动泊车技术甚至无人驾驶技术的愈加成熟,智能式轮速传感器也将发挥更大的作用。
2、轮速信号处理
当轮速传感器在车身安装固定好后,轮速信号的影响因素主要包括因震荡导致的气隙变化和齿圈的表面整洁度。另外,轮速信号随车轮转速的输出信号,应是便于汽车 ECU 接收和处理的方波信号,也就是轮速传感器需要对输入信号(根据前面所述轮速信号采集方式的不同,输入信号应包括vwin 信号和数字信号)进行波形调制、稳压、滤波以及智能式的补偿调节等,要提高轮速测量的精度和准确性,轮速信号处理电路应具有的功能包括:
(1)正弦波信号转换为同频率的方波信号(相对于被动式轮速传感器);(2)抑制噪声干扰;(3)降低气隙变化对轮速信号的影响。基于以上功能,轮速信号处理电路的设计如图6所示。
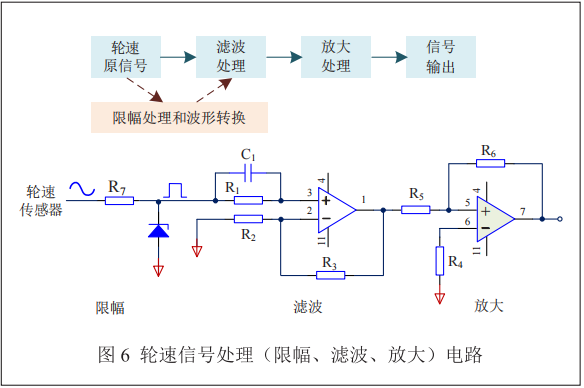
其中,限幅处理主要相对于输出波形微类正弦的信号,一般采用稳压管,将输出信号的输出幅值限制在目标值。其限幅特性表现为:当稳压管选取限制电压为V时,输入信号Vi >V时,输出信号VO=V,Vi
滤波电路要将信号中的噪声干扰信号滤除和衰减,一般来说,衰减高频杂波是主要目的,这样采用有源低通滤波电路,同时采用放大器芯片组合放大,从而得到有效的轮速信号。
四、轮速传感器应用举例
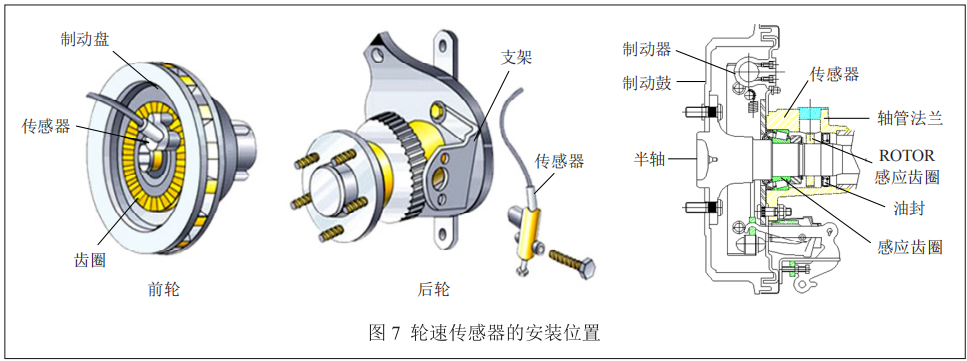
轮速传感器的典型应用体现在防抱死系统(Antilock Brake System,ABS)中,ABS是针对车辆行驶过程中车轮抱死产生的问题。当车轮抱死滑移,车轮与路面间的侧向附着力将完全消失,汽车运动将难以控制:前轮抱死情况下汽车失去转向能力;后轮抱死情况下汽车发生侧滑甩尾;当车轮全部抱死情况下,汽车发生水滑现象。当车轮处于滚动状态下,驾驶员就能够把握汽车的运动,同时可以缩短制动距离,这也就是 ABS 的意义所在。通过轮速传感器获取的速度信号,汽车 ECU判断是否有车轮即将抱死,从而对轮缸压力进行调节,使刹车效率达到90%以上。轮速传感器在车辆的安装如图7所示。
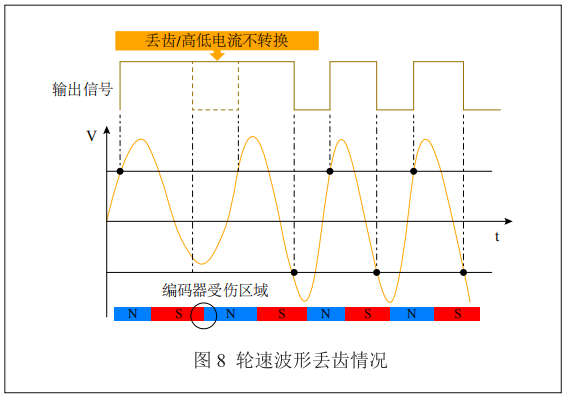
安装时,传感器头与齿圈之间应留有一段约3mm以内的间隙(即气隙)。同时注意在安装前应向传感器加注润滑脂,以防止水、泥或灰尘等对传感器工作产生影响,气隙不在要求范围内或齿圈表面不清洁等,可能造成输出信号的丢齿、电流值不合格或者高低电流不转换等错误模式,如图8所示。
针对这种情况,齿圈与传感器置于封闭环境是必然情况,包括油封、垫片等防油、防水的措施,以及齿圈材料上也应具有更好的防腐蚀性,传感器注塑料的选择等。提高传感器和齿圈的使用稳定性决定了轮速信号的输出稳定性,进而对ABS的有效使用发挥重要作用。
五、轮速传感器发展展望
轮速传感器的设计过程一般是主机厂提供需求,配件厂进行匹配和推荐,也有主机厂会对传感器的部件进行指定(如支架类型、芯片类型等)。就现在多数的订单使用情况来说,我们更多地推荐智能型主动轮速传感器,也有不少主机厂会要求如此。从使用情况来看,汽车的智能化驾驶水平越来越高,智能型轮速传感器所提供的补充信息能够为汽车ECU提供使用参数,因此使用量必然逐步增大。
基于提到的汽车智能驾驶,这里对轮速传感器的发展趋势简单分析:
1、双芯片轮速传感器
双芯片的设计最开始在单片机领域应用,主要用于冗余系统的构建,冗余传感器的设计直观来说是一个齿圈有两个轮速传感器进行探测和信号输出。我司双芯片轮速传感器的作用主要有以下两点:
(1)提高信号准确性和有效性
传感器输出的两路信号在后面的芯片中进行一系列包括滤波、差分计算等更加有效地减小测试值与真实值之间的误差,并能够极大减小数据传输线路损失造成的数据质量降级等对计算结果的影响。
(2)提高系统可靠性
若发生传感器故障导致传感器无法正常工作的情况,备用芯片能够进行替代工作,继续进行轮速信号输出,由此减少系统的故障时间,增加系统的可靠性。
2、无线轮速传感器
为了应用更复杂的底盘结构,开发出无线轮速传感器,通过设置无线信号传输协议将传输信号输入汽车ECU或总线,其最大优势在于对车辆车型的完美适应,大量节省工作人员的设计时间,但是缺点比较明显,需要进行后续的更多验证(包括EMC测试、信号稳定性测试等)。
当然,随着电动汽车的发展,智能化水平的不断提高,对轮速信号的可靠性和稳定性的要求也更高,短时期的发展趋势如上所述。
六、结束语
轮速信号的有效获取在汽车安全系统中十分重要,本文对轮速传感器的类型和信号处理的一般方法进行了简要阐述,分析了其主要特点,描述了轮速传感器的使用原理、类型以及安装环境等。稳定有效的轮速信号是相关安全系统正常触发的基础,汽车智能化水平的提高对轮速传感器提出了可靠性和精度等更高的要求,轮速传感器的设计也必将不断改善,为安全驾驶和智能驾驶提供准确度和适用性更高的信号。
编辑:黄飞











 工商网监
工商网监
评论