双目视觉三维定位原理解析
双目立体视觉是一门有着广阔应用前景的学科,根据双目立体视觉CCAS提供的思路及组成原理,随着光学、电子学以及计算机技术的发展,将不断进步,逐渐实用化,不仅将成为工业检测、生物医学、虚拟现实等领域的关键技术,还有可能应用于航天遥测、军事侦察等领域。目前在国外,双目立体视觉技术已广泛应用于生产、生活中。
双目视觉三维定位原理
双目立体视觉三维测量是基于视差原理。
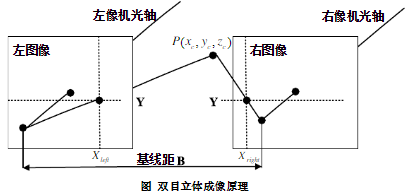
其中基线距B=两摄像机的投影中心连线的距离;相机焦距为f。设两摄像机在同一时刻观看空间物体的同一特征点(xc,yc,zc),分别在“左眼”和“右眼”上获取了点P的图像,它们的图像坐标分别为pleft=(Xleft,Yleft),pright=(Xright,Yright)。
现两摄像机的图像在同一个平面上,则特征点P的图像坐标Y坐标相同,即Yleft=Yright=Y,则由三角几何关系得到:
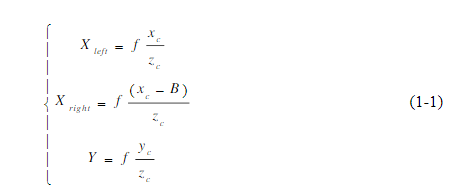
则视差为:leftrightDisparityXX。由此可计算出特征点P在相机坐标系下的三维坐标为:
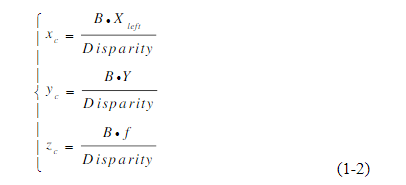
因此,左相机像面上的任意一点只要能在右相机像面上找到对应的匹配点,就可以确定出该点的三维坐标。这种方法是完全的点对点运算,像面上所有点只要存在相应的匹配点,就可以参与上述运算,从而获取其对应的三维坐标。
双目立体视觉的三维测量方法
双目立体测量的特点类似于“双目导航、定位”,一般来说:第一、需要提取的点不多,仅把被测物需要测量部分的点找到即可;第二、速度要求较高,一般要求一秒中测量多个产品;第三、对光照环境要求高。因为测量的时候相机和被测物必然有相对位移,所以拍摄到的图像可能各个角度都会有。一般的实现步骤如下:
第一、相机参数标定。这部分前文已经说过,不再细说了,有兴趣的可以去看CCAS双目立体视觉的相关资料。这部分的主要目的:获取相机的内参数和镜头畸变系数、获取双相机在当前角度下立体参数。
第二、对被测物进行拍摄,并获取被测部分的特征点。这是双目立体视觉测量最重要的部分。主要难点在于该用哪些算法来获取特征点,并且这种特征点的获取方式上,不能用打激光点或手动贴特征点这样的方式来“取巧”,必须尊重原图。根据CCAS提供的一些图像预处理算法进行实验后发现,一般提取特征点时需要用到数十种以上的预处理算法,而这些算法中的参数需要不断的去实验。由于CCAS提供二次开发库,所以在一些极端情况下用户还可以在其中加入一些其他的算法。其最终目的还是把特征点准确的找到。
第三、三维坐标获取。完成以上步骤后,就可以进行立体匹配并计算三维坐标来。这部分比较简单,只要给出来数学模型了直接带入公式即可。CCAS提供了相应的算法模型和和例程。
第四、指定测量范围并输出结果。
非常好我支持^.^
(130) 97%
不好我反对
(4) 3%
相关阅读:
- [工业控制]怎么个视觉定位呢?视觉加伺服的旋转定位技术2023-10-17
- [电子说]可视觉定位的PCBA与FPC激光焊接系统2023-08-22
- [电子说]CCD视觉定位激光打标机实现全自动的打标和编码2023-08-13
- [电子说]加入气压计模组,星斗3号将实现快速三维定位2023-07-28
- [vwin6688 ]如何利用动态车辆施加的运动约束改进视觉定位?2023-07-17
- [电子说]锁定!利用动态车辆施加的运动约束改进视觉定位2023-07-17
- [电子说]CCD视觉检测—FPC柔性线路板视觉定位检测2023-07-07
- [电子说]智造之眼丨飞拍联合定位贴合2023-06-12
( 发表人:李建兵 )