 三类GPS测量技术的应用
三类GPS测量技术的应用
一、GPS简介
GPS是一种通用的全球定位工具,已成为配给时间和频率的基本系统。它由美国国防部控制、管理,至少由24颗卫星组成。GPS卫星发射的无线电在L 1和L 2(载频)上传送,其中L 1:1575.42 MH z;L 2:1227.60MH z。每个卫星传送无线电扩大的频谱波形叫做PRN码(随机噪声码),它位于L 1与L2之间,并能准确识别它发射的PRN码。PRN码一般分为C/A码(粗吗)和P码(精码),C/A码的工作频率为1.023Mbit/s;P码的工作频率为10.23Mbit/s。C/A码位于无线电传送L1波段,P码位于位于无线电传送L1与L2波段之间。将GPS接收机安装在无线电通信系统中,用于校准和检测实验室。
每个GPS卫星上都装载着铷原子或铯原子钟,或者两者都有。星载原子钟提供无线电载波频率和时间参考信号,并在USDOD(美国国防部)和UTC(协调世界时)参考指导下,由USNO(美国海军天文台)维护。其中USNO和NIST(美国国家标准技术研究院)与UTC保持共同一致,时间彼此同步在100ns,频率在不同时刻之间误差小于1x10-13。
用于时间和频率测量中的GPS接收机,多数采用无线电C/A码,以L1频率作为时间和频率参考,与八到十二颗星轨迹同步,提供观察到的所有卫星信号的平均值。能通过RS-232或其它常用的接口,在计算机上提供一天的时间和清晰的数据信息,并且提供一个能容易的与UTC在100ns内同步的1PPS(每秒一个脉冲)脉冲信号和日历。GPS接收机能产生5MHz或10MHz频率输出,有时也产生用于无线电的其它频率,如1.544MHz或2.048MHz。其内部包括一个高精度的本地振荡器,通常是一个温补石英晶体振荡器或铷振荡器,GPS通过连续控制本地振荡器与卫星上星载振荡器保持一致,方便的进行频率标准。
二GPS测量技术
在时间频率计量学中,GPS测量技术通常被分为三类:单相、普通-观测和载波—相位。单相GPS测量的不确定度较小,通常可以满足任何校准或检测实验室。普通-观测和载波—相位测量的程序较多,包括测试数据后处理程序,其测量不确定度更小,一般用在国际比对与计量实验室。
三种GPS测量技术的比较表如下:
| GPS测量技术 | 时间不确定度(2σ/24h) | 频率不确定度(2σ/24h) |
| 单相 | <20ns | <2x10-13 |
| 普通-观测 | ≤10ns | ≤1x10-13 |
| 载波—相位 | <500ps | <5x10-15 |
1、单相GPS测量技术
单相GPS测量技术用于单台钟或振荡器与GPS比较,通常应用在时间脉冲同步和频率校准。校准时,直接从GPS接收机获得作为校准的参考信号,用于绝对时间与不需要对测试结果后处理的地方。接收机在测试之前,必须完成数据采集,采集过程包括观察天线位置。GPS时间频率接收机的天线位置是固定的,观察一次完成后不需要再计算定位位置。因此,时间频率接收机通常存储一个定位位置信号,以后接着使用相同的位置,多数接收机在开机时能够自动的进行自检。当完成一次信号采集,接收机输出信号连接到测试系统。在时间同步测试时,接收机输出的1PPS信号直接接到时间间隔计数器的输入;在频率测试时,GPS内振荡器输出的频率信号(10MHz)可作为相位比较器的输入,或作为频率计数器的外时间基准。
由于GPS卫星传播、调整的信号与UTC一致,因此,GPS接收机的长期准确性总是很好,C/A码的特性变得也相当好。但是,美国政府为了限制其他国家把GPS信息用于高科技和国防上,故意在GPS信号上SA(选择可用性)噪声,以减弱其定位与时间的准确性。当SA设置为0时,GPS接收机的标准相位数据曲线如下:
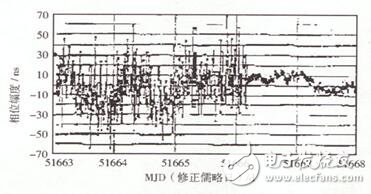
它显示的是10min的平均值数据,将单相GPS接收机输出的1PPS与UTC(NIST)通过时间间隔计数器进行比较。由相位曲线可以看出,每天测试的相位幅度相近。当平均周期为一天或更长的时间时,其稳定性与准确性总是很好,信号相位噪声限制短期稳定性,其阿伦方差图如下:
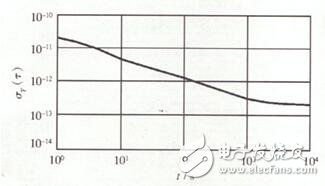
表明接收机的稳定度接近1x10-13/d,平均相位噪声稳定度连续降至10-14量级,相位噪声限制接收机短期稳定度1s时在10-9量级。如果选定从GPS内振荡器获得分布频率,或用它作为一个测量系统的参考,即可得到所需要的短期稳定性。GPS内振荡器几乎能校准任何频率标准的长期稳定度(取样时间为一天或更长时间),但通常不适用测量其中、短期稳定度(取样时间小于1000s)。
2、普通-观测GPS测量技术
普通-观测型是GPS测量技术中一种简便、精巧的方法,它用于同一地方的两台钟或不同地方的本地振荡器相互比较,已长期被用作国际时间与频率标准比对。TAI(国际原子时)与UTC是由约50个实验室200多个本地原子钟的平均数据收集产生,这些数据多数用于一般的GPS测量。一旦数据被传送到BIPM(国际计量局),TAI与UTC的稳定度为10-15。
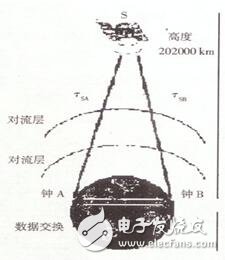
以上显示的是普通-观测型GPS的工作过程。GPS卫星发射机(S)发射的信号作为参考信号,两台钟或振荡器(A与B)现对于两台GPS接收机比较测量。这个卫星与两台接收机之间以普通-观测型出现,二者同步接收S发射的信号,各个接收机与它本地钟接收到的信号或数据记录比较。接收机A接收的信号通过τSA通道与本地参考钟(S-钟A)比较;接收机B接收的信号通过τSB通道与本地参考钟(S-钟B)比较;然后两台接收机互换,接收的数据不同。从两个通道来的误差通常被抵消,包括卫星钟上的性能,最后的测量结果是(钟A-钟B)-(τSA-τSB)。
普通-观测GPS测量技术能完全地将转换为两者接收机位置所共有的测量误差相互抵消,这些误差包括天体位置推算表误差;电离层传播与对流层中断校准误差;接收机坐标误差;以及接收卫星信号时通道的变化、接收中断的变化、温度变化等所产生的误差。为了获得最好的测量结果,要求使用相同的接收设备且天线在相同的位置,并尽可能准确地观察天线的位置。当在同一大陆的两个站之间使用时,普通-观测GPS测量技术的时间不确定度(2σ)将小于10s/d,其频率不确定度是1x10-13。其稳定度大约每天为1x10-13,每周接近1x10-14。
3、载波—相位GPS测量技术
载波—相位GPS测量技术主要用于频率传递,由L1与L2载波频率代替卫星发射的时间码。其重要标志是载波—相位测量能使单通道测量用于绝对时间或普通-观测测量传递过程。载波-相位技术扩展到收集数据的传递过程,并且不需要每天测量,能尽可能地减少测量不确定度,因此,其主要用于原子频率标准与国际比对中。
在采用载波-相位测量技术进行的国际比对中,从接收机获取的信号与从地方的主要频率标准获取的信号比较,在测量结果之前交换彼此实验数据。理论上,每个地点比对仅需要一台接收机。可是,由于大气压的延迟与划分国家基准线有很大不同,接收机网用于改善测量结果。各个接收机收集数据用于帮助解决周期模糊问题,比对在NIST与PTB(德国物理技术研究所)之间进行。在德国,通常一个网络采用6台接收机,每台接收机位于各自实验室,一台接收机位于相邻的实验室,并且,两台位于基准线中间的两个实验室。一些载波-相位网络规模更大,可以包括近100台接收机。
从地球动力学IGS(国际GPS服务站)获得准确的轨迹信息和计算参数,收集详细的电离层与大气压数据,通过专门的软件分析包进行简单的数据分析处理。从载波-相位公式可以看出需要确定的参数,软件分析包能够对许多参数进行估算,但周期跳变与气压延迟参数的值是最难确定的。
-
gps
+关注
关注
22文章
2894浏览量
166180 -
无线电
+关注
关注
59文章
2139浏览量
116427
发布评论请先 登录
相关推荐

盘点3d打印的三类常用耗材
三类表面贴装方法
智能设备三类应用的供电问题分析
三类小米音响的优点与缺点
第三类存储技术为存储行业带来了一次技术飞跃
AI三类医疗器械和人工智能有直接的关系吗
国内储能市场中主要的三类玩家





 工商网监
工商网监
评论