 运算放大器的压摆率如何确定?
运算放大器的压摆率如何确定?
你可能听说过某个放大器“适用于输出电压转换速率高达10V/μs的电路”,因为在其数据手册里注明了压摆率为10V/μs。我们来看看为什么事实并非如此。
假如将一个增益带宽积为B的单级运算放大器用作噪声增益为G的非反相放大器,实际上它应该类似一个截止频率为B/G的一阶滤波器。此时若采用阶跃信号输入,其输出将具有典型的RC低通响应特性。若将输入阶跃信号放大一倍,其输出波形中任意一点的值也将加倍,这意味着每个点的dVout/dt值都将加倍。线性系统是不是很棒?
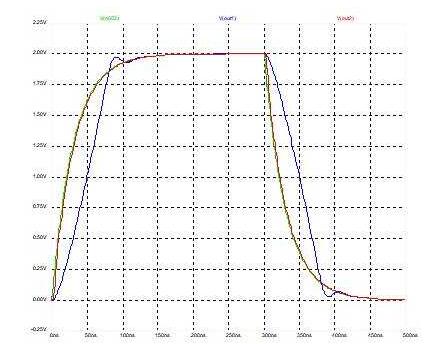
当dVout/dt不随输入驱动量的增大而增大时,就需要采用压摆率限制技术了。这种技术将压摆率限制在某个最大值,使输出电压转换速率不可能更快。正如施瓦辛格在《终结者2》中所说的那样,“这辆车只能开这么快了”。下图显示了一个仿真阶跃(归一化为单位增益)输入,具有5.3MHz单极带限,并通过两个具有相似增益带宽积(GBW)的运算放大器(由LTspice提供):红色迹线表示快速摆率(LT1812,100MHz,压摆率为750V/μs),蓝色迹线表示慢速摆率(LT1801,80MHz,压摆率仅25V/μs)。
是不是只要输出速度不需像数据手册所说的那么快,就没问题了呢?如果输出只需要每微秒转移5V电压,那么一个可保证最小5V/μs压摆率的放大器,再加一点安全裕度,就能够很好地产生我们所需的输出电压吗?
实际上并非如此。如果让运算放大器的输出接近数据手册里的最大速率,输出可能很不准确。要明白这一点,首先需要理解为什么具有常用的转换限制机制的运算放大器并非理想的运算放大器,理想运算放大器增加了一个“if-then”条件限制,可以防止输出转移速度太快。
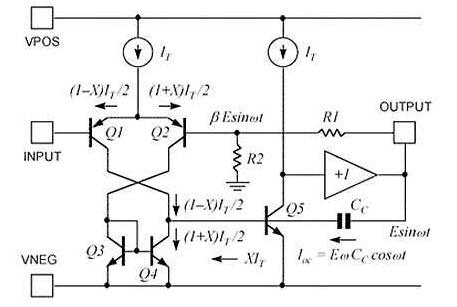
压摆率来自哪里,《ArtofElectronics》这本书里有很好的解释,参看第三版的307~308页,或第二版的407-408页,但你必须仔细体会字里行间的意思。在典型的运算放大器中,输出电压的变化率受输入级可以转储到补偿电容器中电流量的限制。该输入级通常为差分对,两个器件共用一个尾电流源,两个器件电流之和保持不变。输入之间的有限电压引导差分对将有限的电流导入或导出补偿电容器。下图显示了一个典型的运算放大器。
这个引导过程有两个特点。首先,也是最明显的,它是有限制的——超过100%的尾电流无法导入电容器。你可以气哼哼地提供额外的输入电压,但是结果一样,不会有更多的电流了。其次,输出电压会尽可能快地转换,它对输入电压的进一步变化完全没有响应,因此放大器增加的增益也降至零——是的,一点都没有。
这对于一个不经心地看示波器的人(casualscope-prober)来说可能并不明显,因为输出电压在输入信号确定的方向上仍然很大。但是,如果增加一点额外的信号,输出不会有任何反应。而且,环路中没有正向增益,当系统没有反馈时(如同猫离开了),就会产生开环误差(如同老鼠开始捣乱)。因此,不要期望“正常”的电源抑制水平(这是我最想要的),或任何内部噪声的抑制,也不要指望你的平均运算放大器模型能在仿真中揭示这一点!
多年以前,我曾在设计滤波器时出现过一个更微妙的结果。如果放大器的输入级由双极型晶体管制成,不考虑发射极退化(以实现低输入噪声),差分对输出电流变化与输入电压之间远非线性关系。放大器的开环增益与输入特性的斜率成正比。一旦输入级失去平衡,斜率就开始下降。你可以看到,当输入级调制指数随输入驱动增加时,差分对的增益下降,整个放大器的增益和增益带宽都随之下降。一些电路(包括许多有源滤波器)的性能对放大器的增益带宽积敏感,这会导致严重误差。在我的示例中,滤波器响应在截止频率附近出现不可接受的峰值,但这只发生在大输入信号的情况下。
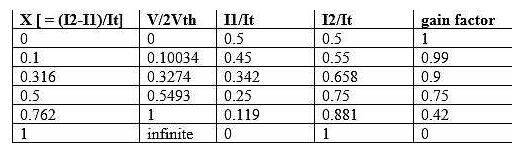
下表示出放大器(输入器件不退化)的增益系数是如何随着驱动的增加而下降的。当输出转换速率仅为最大速率的32%时,开环增益下降10%。
因此,有时候指定一个比信号需要的转换速率高得多的压摆率才是正解。当有人说:“这个放大器的单位增益带宽为5MHz,压摆率为10V/us”时,你应该回答:“对,但可能这两者不能同时出现”。
-
运算放大器
+关注
关注
215文章
4929浏览量
172823 -
压摆率
+关注
关注
1文章
23浏览量
4506
发布评论请先 登录
相关推荐
衡量运算放大器的速度用的是SR压摆率,衡量比较器的速度在datasheet上一般用什么参数?
电流反馈运算放大器是什么?
具有可编程电源电流的超高压摆率运算放大器
LT1126的 双重补偿低噪声,高速精密运算放大器
四路解补偿低噪声的失衡运算放大器
常规运算放大器的自举电路设计
运算放大器参数检索
用运算放大器构成压控恒流源的研究
TI推出压摆率达2675V/us的JFET输入放大器
使用运算放大器进行设计以实现低噪声

RS846xP系列增强压摆率运算放大器介绍

江苏润石RS846xP系列增强压摆率运算放大器





 工商网监
工商网监
评论