 dfrobot4WD四驱监控机器人平台简介
dfrobot4WD四驱监控机器人平台简介

产品简介
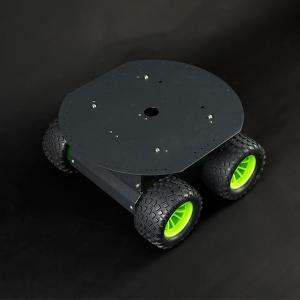
4WD四驱机器人底盘一款专门为室外监控设计的移动机器人平台。相对于传统3轮驱动的平台,4WD采用了4路电机进行独立驱动,此种驱动方式不但可以提供强劲的驱动能力,也拥有强大的越障和爬坡能力,特别适合室外的应用。
该底盘系统的机身采用铝合金材料,完全能胜任野外苛刻的运行环境,结合130mm-148mm直径的橡胶轮所提供的卓越的越障能力,使得该平台成为室外机器人研究和爱好的首选平台。
技术规格
4个12V减速直流电机,251RPM
空载转速:8100RPM/min
减速后转速:120RPM/min
整机输出功率:60W
整机空载电流:500mA
车轮直径:130mm
最大行驶速度:170cm/s
小车尺寸:长 360mm 宽355mm 高165mm
小车净重:4.2kg
小车承重:5kg
本价格只含机械平台、电机、轮子,不含电路、云台及摄像头
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6085浏览量
35294 -
DFRobot
+关注
关注
4文章
1157浏览量
9506
发布评论请先 登录
相关推荐
Atlas转型电驱,纯电+AI正在加速通用人形机器人落地
人形机器人新版Atlas。这一事件标志着波士顿人形机器人液压传动路线向纯电的彻底转变。 同时,在四月末,北京人形机器人创新中心在北京经开区发布了全球首个纯电

使用NVIDIA Jetson打造机器人导盲犬
Selin Alara Ornek 是一名富有远见的高中生。她使用机器学习和 NVIDIA Jetson边缘 AI 和机器人平台,为视障人士打造了机器人导盲犬。
使用机器学习和NVIDIA Jetson边缘AI和机器人平台打造机器人导盲犬
Selin Alara Ornek 是一名富有远见的高中生。她使用机器学习和 NVIDIA Jetson 边缘 AI 和机器人平台,为视障人士打造了机器人导盲犬。
该项目名为 IC4
七腾机器人:防爆轮式机器人-四轮八驱全新上线
今日,七腾机器人有限公司(以下简称“七腾机器人”)推出全新产品:防爆轮式机器人-四轮八驱。该款产品是七腾轮式巡检

隧道机器人电缆隧道在线监测轨道综合管廊设计原理和实施方案
一、设计原理 机器人系统: 选择适合隧道环境的机器人平台,具备灵活的移动能力和适应不同地形的能力。 配备多种传感器,如高清摄像头、温度传感器、湿度传感器、气体传感器等,用于实时监测隧道内的各种参数
NVIDIA Isaac 机器人平台利用最新的生成式 AI 和先进的仿真技术,加速 AI 机器人技术的发展
观众展示了用于人形机器人学习的通用基础模型 Project GR00T(代表通用机器人 00 技术)。Project GR00T 利用 NVIDIA Isaac 机器人平台的各种工具来创建用于人形

全球机器人开发领域采用NVIDIA 机器人开发和生产
比亚迪电子、西门子、泰瑞达和 Alphabet 旗下公司 Intrinsic 采用 NVIDIA Isaac 机器人平台开发自主机械臂、人形机器人和移动机器人 NVIDIA 于今日宣布,全球
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉检测目标的变化做出及时的反应
发表于 05-29 16:17
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
NVIDIA Isaac机器人平台近期实现重大升级,通过引入最新的生成式AI技术和先进的仿真技术,显著加速了AI机器人技术的发展步伐。该平台正不断扩展其基础模型、机器人学习框架、AI工
NVIDIA入局人形机器人!Isaac平台迎来重要更新
NVIDIA Isaac 机器人平台利用最新的生成式 AI 和先进的仿真技术,加速 AI 机器人技术的发展。

顶驱钻机远程监控运维系统解决方案
时俱进。对此,基于设备制造商的需求,数之能提供工程机械远程监控运维系统解决方案,帮助企业更好的管理设备资产并灵活调度。 通过将顶驱钻机PLC接入到数之能工业物联网平台中,实现设备数据采集与远程

顶驱钻机数据采集远程监控系统如何实现
,如何实时采集、分析这些数据,以实现对钻井过程的远程监控和优化,成为了众多设备商关注的重点问题。 解决方案 物通博联推出的顶驱钻机数据采集远程监控系统主要由工业智能网关和远程监控云
AI聊天机器人平台Poe获7500万美元融资
近日,Quora宣布成功融资7500万美元,此轮融资由Andreessen Horowitz (a16z)领投。这是Quora近七年来首次进行融资,所得资金将主要用于推动其AI聊天机器人平台Poe的发展。





 工商网监
工商网监
评论