 dfrobotDFLG6DOF 6自由度机械臂简介
dfrobotDFLG6DOF 6自由度机械臂简介
一款小型、性价比较高的6自由度机械臂


简介
机械臂、机械手相信大家都不陌生了如医院里的手术机械手、工厂里的工业机械手,但其庞大的身躯和高额的售价,使我们爱好者望而却步,如今DFRobot开发了一款小型廉价的6自由度机械臂,希望能圆大家一个玩机械手的梦!
DFLG6DOF机械手由6个微型伺服电机(舵机)组成,分别对应于臂、肘、腕(2个自由度)、张合5个关节和1个旋转底座,每个关节可在一定范围内运动,底座可以实现左右90度旋转。通过上位机控制软件给舵机控制器发送控制指令,从而实现机械臂在空间中的精确作业。在机械臂上安装摄像头同时将机械臂安装到移动平台上,即可实现远程无线可视作业。总而言之这是一套非常不错的机器人演示教学平台和DIY套件。
舵机可以直接接插在arduinoIO扩展板或者Romeo 机器人主控器上,直接使用arduino的servo库,即可轻松驱动舵机,实现机械臂的控制。还可以搭配我们的舵机驱动板,配合专门的上位机软件,可以快速入门自动化控制。Arduino的神奇之处在于多样化的扩展设备和示例代码,在该平台上运作的设备都非常容易上手。
注意事项:
1. 本套件以散件的形式提供,需要自行组装。有完整的组装视频,您不必担心装不上的问题。
2.控制器推荐:威龙24路舵机控制器。它是DFRobot出品的高性能、专业舵机控制设备。
技术规格
工作电压:4.8~7.2 V
最大负载:500 g
工作电流:3A@5V (max)
接口类型:XH2.54-3P 接口
机械臂长度:280 mm
机械臂高度:340 mm
重量:1096 g
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网 网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 嵌入式主板
+关注
关注
7文章
6072浏览量
34856 - DFRobot
+关注
关注
4文章
1155浏览量
9253
发布评论请先登录
相关推荐
国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
机械
臂通过ROS机器人操控系统,简化了
6
自由度串行总线舵机复杂运动控制,可实现
发表于06-28 14:37
干货!国产Cortex-A55人工智能实验箱机械臂积木搬运实验案例
的顺序叠起来放到中间灰色的方块上。二、实验原理
机械
臂
自由度
机械手
自由度,是指传送机构
机械手的运动

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
,为工业自动化提供了一套切实可行的方案。 本文针对基于机器视觉的工业机器人进行研究,主要工作包括以下几点: (1)设计了基于 伊瑟特的六
自由度机器人视觉伺服控制系统总体方案。以 ESR
6B机器人
发表于05-29 16:17
【先楫HPM5361EVK开发板试用体验】(原创)5.手把手实战AI机械臂
HPM5361EVK开发板。现在开始设计实战AI
机械
臂的程序。 代码结构 由于编写一个完整的用先楫HPM5361EVK开发板控制三组四
自由度
机械
臂
发表于02-06 10:28
【国产FPGA+OMAPL138开发板体验】(原创)2.手把手玩转游戏机械臂
。但由于篇幅限制,下面是一个简化的项目方案和步骤: (我会尽量逐行解释关键部分的代码。谢谢!) 1. 硬件连接与配置 首先,需要将TI OMAP-L138 FPGA处理器开发板、三组四
自由度
机械
臂以及红外
发表于02-01 20:18
一文读懂六自由度激光跟踪仪
激光跟踪仪与空间姿态探头(iProbe
6D姿态探头)配合使用,就组成六
自由度激光跟踪仪。它能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。

如何解决柔性机械臂建模过程问题
的问题。 由于
机械
臂的截面相对于其长度而言很小,可以将柔性杆作为Euler-Bernouli梁,柔性
机械
臂可以视为一个具有无限
自由度的连续系
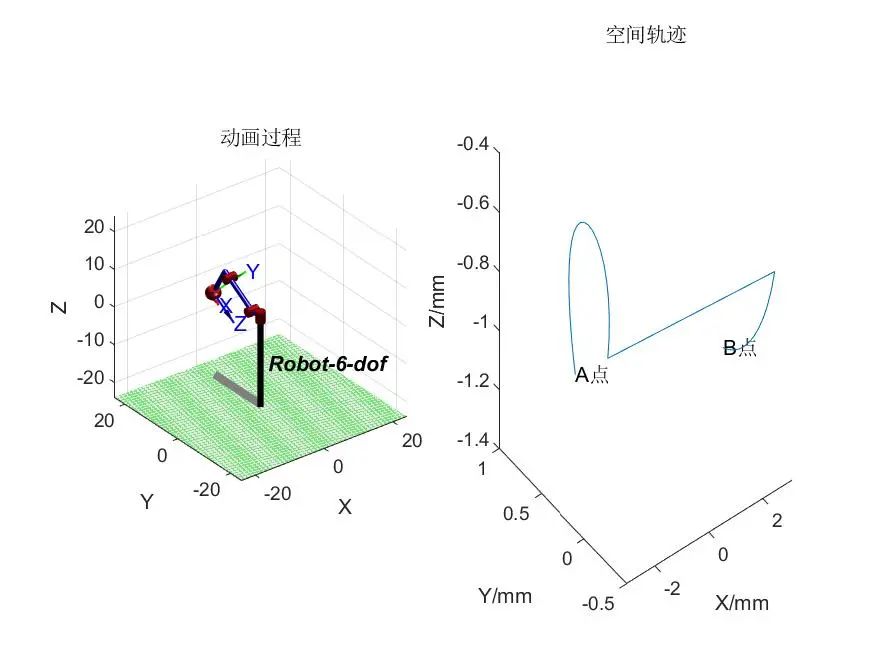
六自由度机械臂轨迹规划仿真
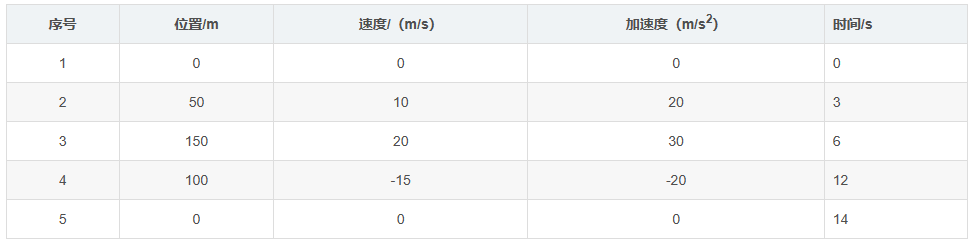
采用五次多项式插值法进行
机械
臂轨迹规划,基于Matlab Robotics Toolbox平台进行关节空间轨迹规划,得到各关节角度、速度和加速度与时间关系曲线。 此外,每次重新启动MATLAB时都
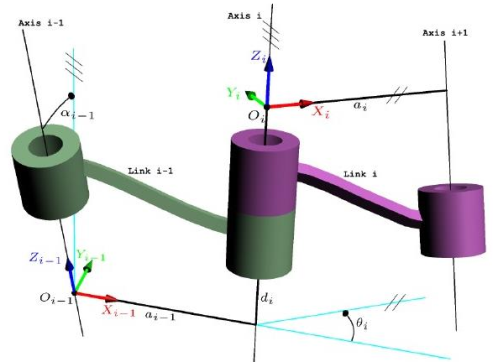
六自由度机械臂三次多项式插值法
对串联
机械
臂而言,轨迹规划可以分为:关节空间轨迹规划和笛卡尔空间轨迹规划。关节空间轨迹规划是把机器人的关节变量变换成跟时间的函数,然后对角速度和角加速度进行约束。 笛卡尔空间轨迹规划是把机器人末端在
机械臂结构是什么样的
该
机械
臂
6个关节都是转动关节,前 3 个关节确定手腕参考点的位置,后 3个关节确定手腕的方位。和大多数工业机器人一样,后 3个关节轴线交于一点。因此将该点作为手腕的参考点,也选作为连杆坐标系{4

ADIS16550: 自治等级,6度自由不感官自由6度数据表 ADI
德赢Vwin官网 网为你提供ADI(ADI)ADIS16550: 自治等级,
6
度
自由不感官
自由
6
度数据表
发表于10-09 18:50

工业机器人和机械臂的设计、功能和应用有哪些区别?
设备,专门用于在工业生产线或其他工业环境中执行各种操作任务。它们通常具备多轴关节结构或多
自由度的机器装置,能够在三维空间内
自由移动,并搭载各种工具、夹具或传感器来






 工商网监
工商网监
评论