 STM32编码器接口 以及应用编程
STM32编码器接口 以及应用编程
Ⅰ 关于编码器
编码器的种类有很多,什么增量式编码器、绝对值编码器,有轴或者无轴编码器,电压输出、推拉输出、集电极开路输出等等。但不管什么类型的编码器,其目的都类似,得到转动的角度,角速度、位移等。
本文讲述常见的增量式编码器,增量式编码器也可以叫正交编码器,也就是说可以通过其A、B的相位知道编码器是正转,还是反转,还可以根据编码器参数得出旋转了多少角度等。
常见的增量式编码器A、B、Z三根线代表什么意思呢?使用过编码器的人不难理解,这里简单给初学者讲述一下:
A、B两线提供相位相差90度的脉冲信号,用其来计算旋转的角度;Z线为过零点线,也就是说每转一转,经过某一点都会输出一个脉冲信号,主要用于“过零校正”,三线的信号大致如下图(左边):
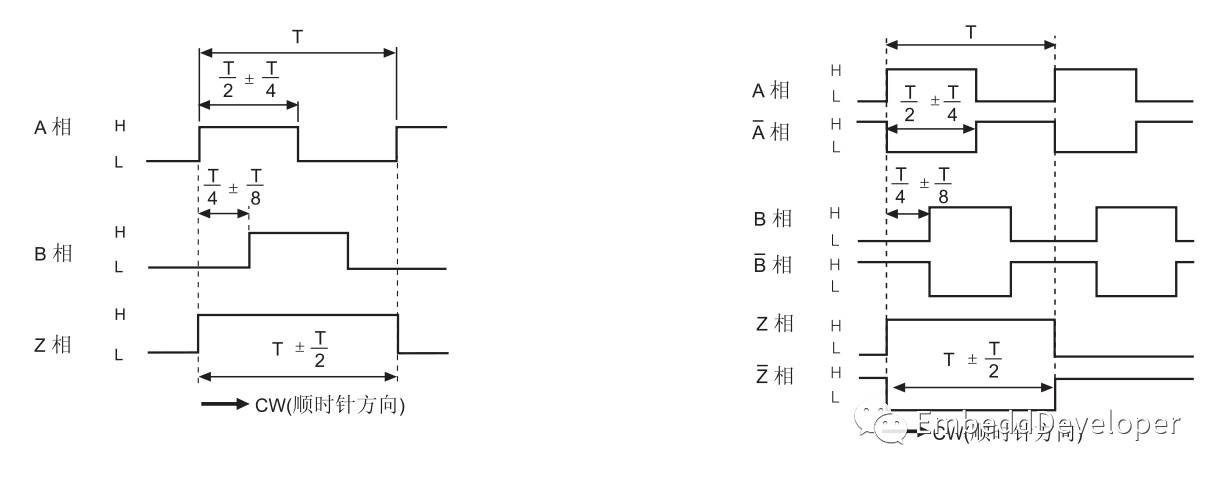
有些编码器出来的线有一个对应的“非”信号线(如上图右边),其实主要用于抗干扰的。
更多关于编码器的描述,请网上搜索相关的知识进行了解,本文不再讲述。
在STM32芯片中,都有这么一个定时器,叫通用定时器“General-purpose timers”,定时器里面存在这么一个模式,叫编码器接口模式“Encoder interface mode”。当然,具体是哪一个TIM,可参看芯片对应的数据手册,可以一目了然。
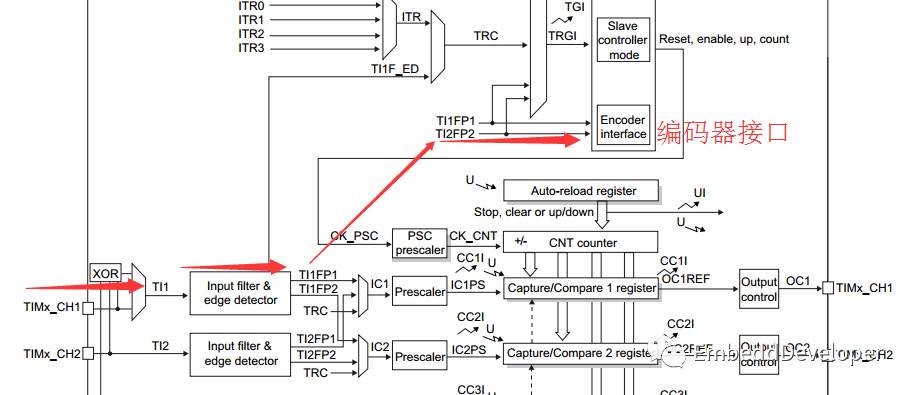
STM32提供的编码器接口模式主要针对的就是“正交编码器”,它可以利用定时器的“计数”功能,得出编码器计了多少个脉冲;同时,它可以根据编码器AB的相位得出编码器是正转,还是反转。
(图片来自STM32参考手册)
1.计算脉冲个数
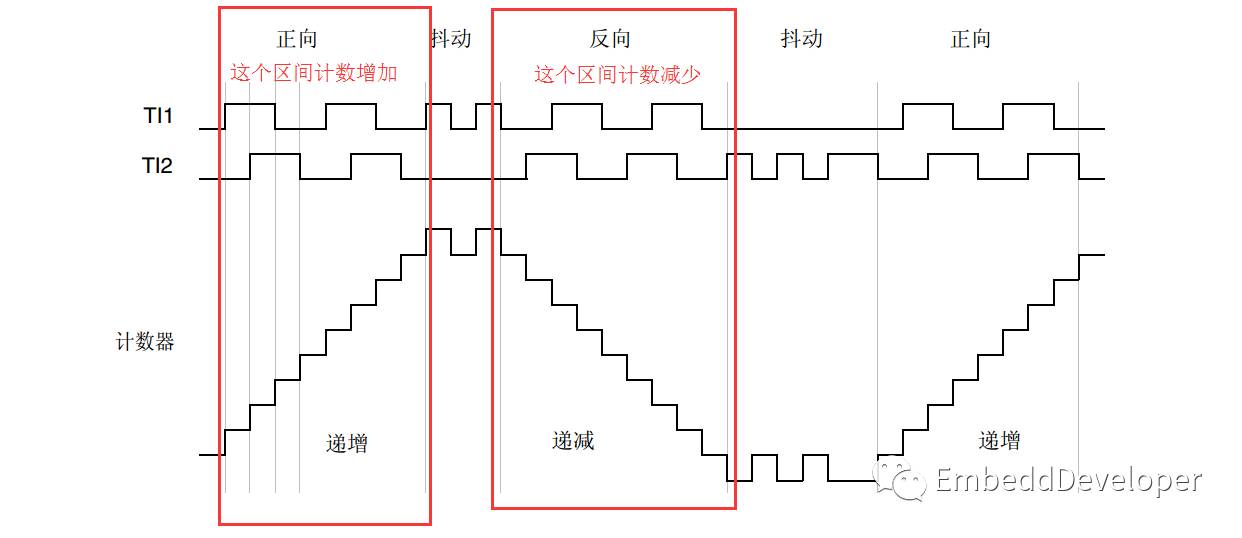
有点类似TIM的捕获功能,捕获A相、B相的脉冲信号;只是编码器模式是捕获A(TI1)、B(TI2)相的边沿信号(如上图),相当于一个周期内,计4个脉冲信号的值。
2.计数器的增减(方向)
STM32的计数器会根据方向(+ 或者 -)来进行计数,TI1和TI2相位相差90,4个阶段的边沿,对应TI1和TI2不同电平信号,从这个不同的信号,硬件自身可以判断出其方向。在编码器模式下,有个寄存器(TIMx_CR1)中有一个方向位(DIR),会随着编码器旋转方向的改变而改变,我们可以通过读取该位来判断编码器的正转,还是反转。
3.TIM时基
STM32编码器接口模式,其实是通过利用AB相位TIM时基提供时钟信号,使其计数。
Ⅲ 应用编程
相信看了上面的一些描述,大家应该对编码器有所理解了。其实,在STM32中,可以通过配置编码器模式对应的函数,就能实现获取编码器传感器上面的信息了。
使用STM32提供的标准外设库,或者使用STM32CubeMX工具很容易将TIM配置成编码器模式。
1.标准外设库配置编码器
TIM_EncoderInterfaceConfig,它就是编码器接口的配置函数。简单的只需要配置该函数,使能TIM,即可实现采集编码器上面的信息。(当然,需要复杂的操作,还需要做其他相应的配置)
void ENCODER_Configuration(void){ TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); TIM_Cmd(TIM3, ENABLE);}
2.STM32CubeMX配置
STM32CubeMX是一套快速开发的工具,让很多不了解STM32底层的朋友可以快速的在STM32上编写应用程序。
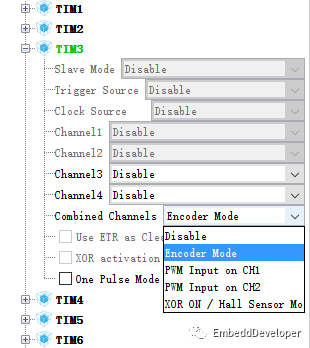
本文说的配置编码器接口,在某些TIM上存在一个“Combined Channel”配置,可以理解为“连接通道”,也算是TIM的一种复用模式。选择里面的“Encoder Mode”即可。
Ⅳ 实例代码
本文提供的代码为一个使用标准外设库编写的简单Demo工程,其中里面附带一个工程(用于vwin 编码器AB相波形的工程),如下如:
该工程主要配置TIM的编码器模式,通过定时读取编码器的方向(DIR),和计数(CNT),并通过串口打印出来。
下载地址:
百度网盘:
链接:https://pan.baidu.com/s/1jH8yOqM
密码:t4kx
GitHub:
https://github.com/EmbeddDeveloper/STM32F4_TIM_Encoder
CSDN:
http://download.csdn.net/download/ybhuangfugui/10165086
-
编码器
+关注
关注
45文章
3638浏览量
134419 -
接口
+关注
关注
33文章
8575浏览量
151014 -
STM32
+关注
关注
2270文章
10895浏览量
355715
发布评论请先 登录
相关推荐
增量编码器与绝对值编码器的区别

二进制编码器与绝对编码器的区别
磁电编码器和光电编码器的区别
MT6501在线编程磁编码IC:光电编码器的理想替代品
旋转编码器在PLC中怎么编程
增量编码器和绝对值编码器的区别
使用STM32的编码器接口对接增量式编码器控制电机进行很低速的转动时,需要如何进行电机转速的测量?
编码器脉冲信号(怎么测量 | 丢失怎么处理 | 丢失的原因)
差分编码器信号如何接plc?

差分编码器信号如何接plc
编码器分辨率是什么意思 编码器分辨率和脉冲数的关系






 工商网监
工商网监
评论