 基于二维MEMS扫描振镜的激光雷达设计了发射光学系统和接收光学系统
基于二维MEMS扫描振镜的激光雷达设计了发射光学系统和接收光学系统
摘要:近年来人们对具有安全驾驶、智能控制功能的汽车需求增长,使智能驾驶汽车快速发展起来,激光雷达作为智能驾驶的核心传感器之一得到广泛的关注,其中MEMS激光雷达具有高帧率、高分辨率、体积小、成本低的优点,是国内外车载激光雷达的主要发展趋势之一。光学系统是MEMS激光雷达重要组成部分之一,分为发射光学系统和接收光学系统,本文基于镜面直径5 mm的二维MEMS振镜设计了发射光学系统,将25 W的半导体激光器准直为弧矢方向发散半角为1 mrad,子午方向发散半角为3 mrad的光束;设计了大相对孔径为1:1、焦距为11.01 mm的镜头作为接收镜头,并提出采用放大倍率为2.2的纤维光锥与16线APD阵列探测器耦合,扩大接收光学系统的视场;APD阵列探测器采用选通模式,提高雷达系统的信噪比。基于此设计结果搭建激光雷达样机,实验验证系统探测距离可达45 m,全视场角40︒ × 10︒。结果表明系统可一定程度上提高激光雷达探测距离和视场角。
0引言
激光雷达是一种通过使用激光束测量目标距离的测量方法,在航空航天、军事、气象等国民经济生活中得以广泛的应用。尤其在智能驾驶领域,三维成像激光雷达是实现无人驾驶的关键技术之一。目前激光雷达主要的技术方案有固态激光雷达、混合固态激光雷达、机械式激光雷达,其中混合固态激光雷达采用MEMS(Micro Electro Mechanical System)扫描振镜作为扫描机构,主要系统包括发射系统、接收系统和信号处理系统,可实现三维成像,具有远距离,高帧率,高分辨率的优点,并且有望实现激光雷达的小型化和低成本化,是国内外车载激光雷达发展的主要趋势之一。
光学系统作为MEMS激光雷达重要组成部分,分为发射光学系统和接收光学系统,发射光学系统的主要任务是减小发射光束的发散角,使其光束质量更好,主要设计难点是MEMS扫描振镜的镜面面积较小,限制光束的直径,直接影响准直光束的发散角。接收光学系统主要任务是在保证口径的前提下接收更大视场范围内的回波光束,主要设计难点是光电探测器面积有限,会限制接收光学系统相对孔径和视场。
目前国内外研究者基于MEMS扫描振镜提出了许多不同的光学方案,Ito等开发了配备单光子CMOS焦平面探测器的MEMS激光雷达,可以测量距离高达25 m,全视场角为45︒ × 11︒。Jae-Hyoung Park利用间接时间飞行法,搭建了基于直径3 mm的二维MEMS扫描振镜的激光雷达系统,实现了2 m、4 m、6 m、8 m距离处多目标物体的距离测量及三维成像。
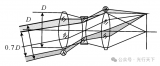
邱琪等提出一种6个扫描子系统组成的全向激光探测雷达结构,其中发射光学天线将MEMS镜±10 °的扫描角扩展到±30°;接收天线物镜F数为3,视场角为67 °,视场角范围内接收到的激光回波经过接收天线在探测器上所成的半像高小于1 mm。易可佳等研制的一种小型化实时成像的MEMS激光雷达样机,其距离分辨率为1 cm,视场角为24°。
本文根据基于二维MEMS扫描振镜的激光雷达系统的特性,设计了一套激光雷达的光学系统,包括激光雷达发射光学系统和匹配激光雷达大口径、大视场探测需求与探测器小接收面积的接收光学系统,并搭建了激光雷达原理样机。
1激光雷达结构
基于二维MEMS扫描振镜的激光雷达系统采用飞行时间法测距,整体光路采用收发并行光路系统,光源为半导体脉冲激光器,探测器为高灵敏度的APD阵列探测器,如图1。激光雷达工作时,控制系统使激光器发出高频率脉冲激光,经由准直系统准直为发散角较小的光束,再控制二维MEMS扫描振镜的偏转角,改变出射光束方向,逐点扫描目标;目标反射的回波光束经过接收光学系统会聚到APD阵列探测器表面,APD阵列探测器上对应的单元被选通以接收光信号。控制系统基于时间飞行法(ToF)准确计算激光飞行往返路径的时间来实现距离测量。
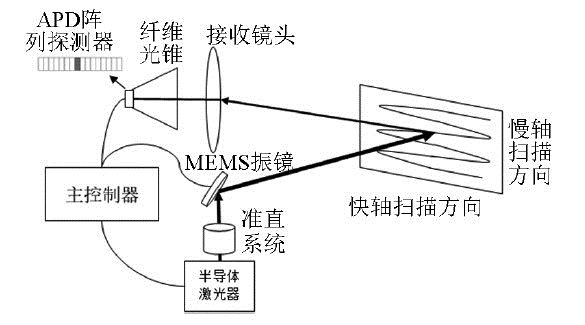
图1 基于二维MEMS扫描振镜的激光雷达系统示意图
激光和微波同属电磁波,根据微波雷达的作用距离方程可得激光雷达方程为:

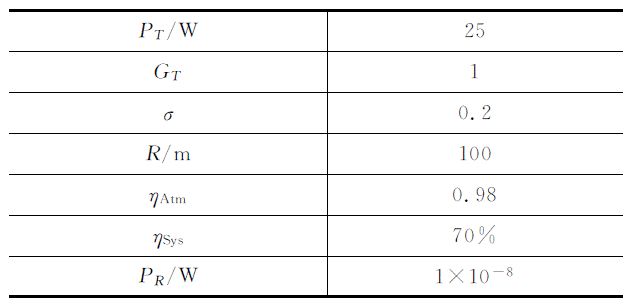
式中,PR是接收激光功率;PT是发射激光功率;GT是发射天线增益;σ是目标散射系数;D是接收孔径;R是激光雷达到目标的距离;ηAtm是单程大气传输系数;ηSys是激光雷达的光学系统的传输系数。根据激光雷达距离公式可知,为激光雷达设计合适的光学系统是实现激光雷达远距离、大视场的必要条件。其中发射光学系统应尽量选用大功率激光器,且发射光束需发散角较小,远场能量集中;若要求激光雷达探测距离大于100 m,假设激光雷达作用距离公式中各个参量的值如表1所示,则接收光学系统的入瞳直径需大于10 mm。考虑大阵列的APD探测器成本较高,为降低激光雷达成本,采用Hamamatsu公司S13645-01CR型1 × 16线阵APD探测器,单个APD面积1 mm × 0.4 mm,总的面积为1 mm × 8 mm。当接收光学系统的入瞳直径2d为10 mm,视场角θ为40° × 10°,根据f =d/tanθ,则接收光学系统的焦距为2.84 mm,即要求接收光学系统的相对孔径(2d/f)为10:2.84,光学镜头难以满足要求。因此,本文提出在光电探测器和接收光学系统间加入纤维光锥平衡接收光学系统在光电探测器面积一定的情况下对大口径和大视场的需求,并且APD阵列探测器采用选通模式,降低大相对孔径的接收镜头接收到的背景光的干扰,提高系统的信噪比。
表1 距离公式变量值
1.1发射光学系统设计
激光雷达光源为波长905 nm的脉冲半导体激光器,该激光器输出功率为25 W,弧矢方向光斑尺寸为15 μm,发散角为25°(FWHM),子午方向光斑尺寸为74μm,发散角为10°(FWHM)。半导体激光器的弧矢(平行于结平面方向)、子午(垂直于结平面方向)方向发散角不同,故采用两个母线相互垂直的柱面镜对弧矢、子午两个方向分别准直。根据高斯光束远场发散角定义θ=λ/πω0,准直后束腰半径越大,MEMS振镜的镜面尺寸需越大,而MEMS振镜的扫描频率则会随之减小,综合考虑激光雷达对准直后光束小发散角和MEMS振镜高扫描频率的要求,采用直径5 mm的MEMS振镜,其快轴扫描频率为1.2KHz,慢轴扫描频率在10 Hz左右。
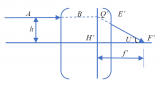
利用光学仿真软件,建立柱面镜准直的仿真模型,如图2所示。在距离光源45 mm的地方放置了一块30°倾斜、直径5 mm的反射镜,其等效于零扫描角时的MEMS振镜。
根据半导体激光器的发光特性,设计使用焦距为4.62 mm的非球面柱面镜进行子午方向的准直;设计使用焦距为13.91 mm的球面柱面镜进行弧矢方向的准直。
仿真得到准直后距离反射镜不同距离的光斑,取峰值功率1/e2处光斑半径,将散点拟合为直线,该直线近似为双曲线的渐近线,直线方程为
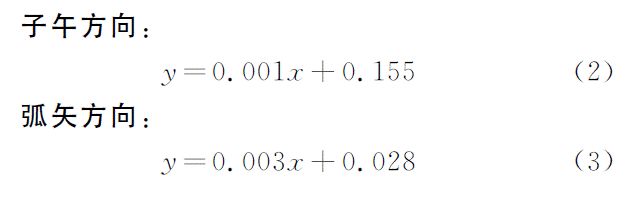
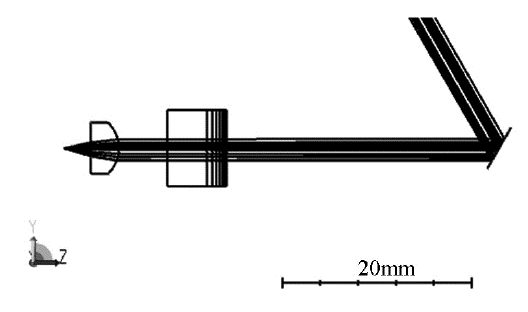
图2 光学仿真模型
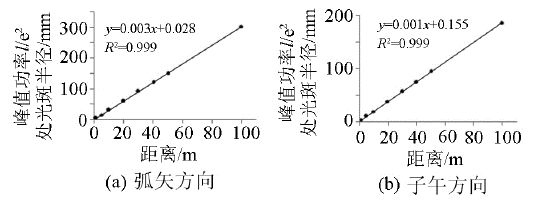
图3 光斑半径随光传播距离的曲线
直线斜率为准直后光束发散角的正切值,则
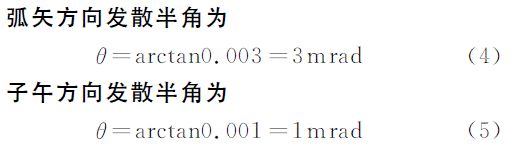

图4 距离MEMS振镜100 m时激光光斑截面图
得到准直后子午方向发散半角为1 mrad,弧矢方向发散半角为3 mrad,如图3所示。图4给出了仿真模型中距离MEMS振镜100 m的探测器接收到的激光光斑,该光斑总能量为24.01 W,即有96%以上的激光能量经由MEMS振镜反射,仅有包含约4%的激光能量的光束未入射到MEMS振镜上,沿原方向出射。
1.2接收光学系统设计
如前文所述,为满足激光雷达远距离光信号的探测对大口径、大视场的要求,在接收镜头和APD阵列探测器间加入放大倍率为2.2的成像纤维光锥作为中继元件。该纤维光锥由数千上万根锥形光纤规则排列组合而成,每根锥形光纤芯径小于6 μm,纤维光锥入射端面接收到的图像被分解为与锥形光纤排列相对应的像元;规则排列的锥形光纤将所携带的像元信息一一对应地传递到纤维光锥的另一端;像元在传递过程中随锥形光纤直径的变化被放大或缩小,在出射端面按原排列方式组合成像。本文中纤维光锥口径小的一端直径10 mm,紧贴APD探测器,口径大的一端直径22 mm,位于接收光学镜头的像方焦平面位置。
综合考虑接收光学系统的口径和视场,接收光学的设计指标如表2。
表2 接收镜头设计指标
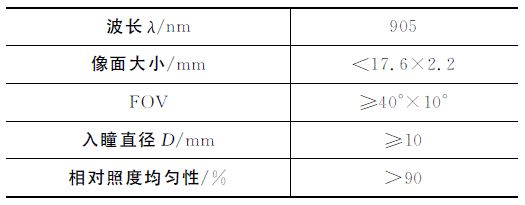
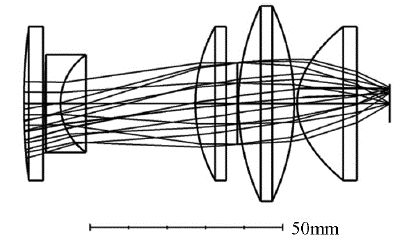
图5 接收镜头仿真模型
在光学仿真软件中选择反远距型镜头为初始结构,设置评价函数,选用市场上现有透镜,优化系统,最终得到接收镜头的结构如图5所示,共有5片镜片组成,其中最后一个透镜为非球面透镜。
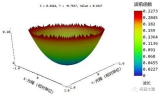
接收镜头焦距为11.01 mm,视场角为40 ° × 10 °,相对孔径1:1,系统总长95.08 mm。图6为接收镜头像平面的光迹图,像面大小为5 mm × 2.2 mm,x方向从左至右依次为视场(0 °,0 °)、(0 °,3.5 °)、(0 °,5 °)的光线在像平面所成光斑,y方向从下至上依次为(0 °,0 °)、(14 °,0 °)、(20 °,0 °)的光线在像平面所成光斑,x方向像高1.10 mm,y方向像高为4.17mm。图7为像平面的相对照度均匀性,20 °视场角范围内像平面的相对照度均匀性在90%以上。

图6 像平面光迹图
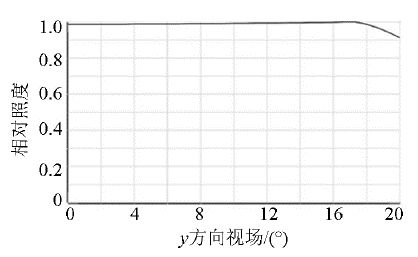
图7 像平面相对照度均匀性
2实验结果
根据以上仿真设计结果,结合机械设计,搭建了激光雷达的样机,如图8所示。其中,纤维光锥直接紧贴在拆除封装窗口的APD阵列探测器表面,中间的空隙以松柏油填充,如图9,可在纤维光锥的大端面看到APD阵列探测器表面的放大像,耦合效率约为74.14%。
图8 激光雷达样机
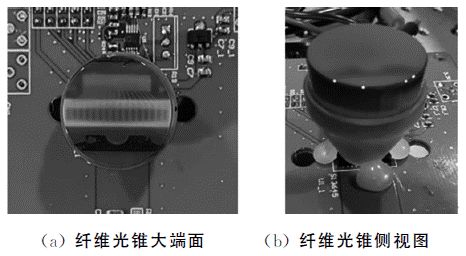
图9 APD阵列探测器与纤维光锥耦合模块
图10 实验拍摄光斑图
在距离发射光学系统6.67 m距离的光屏上拍摄了激光光斑图,如图10,该光斑的光斑半径为12.81 mm × 26.78 mm,根据tanθ=r/d,激光的发散角为0.11° × 0.23 °。
在距离激光雷达垂直距离1.5 m的前方有一面白墙,接收光学系统的光轴与墙面垂直,当发射光学系统的扫描角为(0 °,0 °)、(5 °,0 °)、(0 °,5 °)、(0 °,10 °)、(0 °,15 °)、(0 °,20 °)时,对应选通APD探测器从左至右第8个、第8个、第7个、第5个、第3个、第1个单元,APD探测器接收到的回波信号幅值及其修正后电压幅值如表3所示,相应的计算了修正后电压幅值与其平均值的差值占其平均值的百分比均小于10%。结果表明该激光雷达的样机视场角为40 ° × 10 °,接收系统像平面的照度均匀性大于90%。
表3 激光雷达不同视场回波信号测试结果

将激光雷达放置在一地下车库测试,APD探测器选通第8个单元,发射光学系统扫描角为0 °,发射系统发出的激光脉冲照射在距离样机45 m的一面白墙上时,将接收系统可以接收到的回波信号连接在示波器上显示如图11所示,峰值电压为4.45 V。
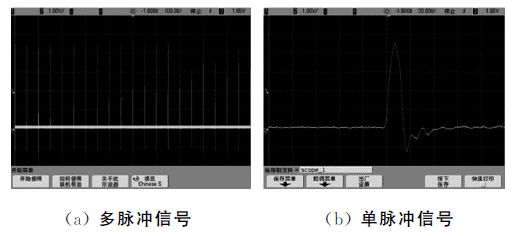
图11 激光雷达回波信号
3结论
本文为基于二维MEMS扫描振镜的激光雷达设计了发射光学系统和接收光学系统。系统选用直径5 mm的MEMS扫描振镜,利用柱面镜将25W的半导体激光器,准直为发散角为1 mrad(子午方向)和3 mrad(弧矢方向)的光束;以放大倍率2.2的纤维光锥作为接收镜头和APD阵列探测器的中继元件,设计了焦距为11.01 mm、视场角40 ° × 10°的反远距镜头作为接收镜头,其相对孔径1:1。APD阵列探测器采用选通模式避免大相对孔径的接收光学系统接收到的干扰光降低雷达系统信噪比。基于仿真结果,搭建了激光雷达原理样机,实现45 m远目标的探测,系统全视场角40 ° × 10 °。该激光雷达系统一定程度上解决了大视场探测需求与探测器小接收面积的矛盾问题,若完善该雷达样机的MEMS扫描振镜驱动系统、APD阵列探测器选通系统及数据处理系统,有望实现三维成像激光雷达系统的搭建。
-
mems
+关注
关注
129文章
3924浏览量
190574 -
光学系统
+关注
关注
4文章
243浏览量
18298 -
激光雷达
+关注
关注
968文章
3967浏览量
189817
原文标题:基于二维MEMS振镜的激光雷达系统的光学设计
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
高倍金相自动测量显微镜无限远光学系统

共聚焦激光显微镜的光学系统解析
高质量激光光束光学系统中的空间滤波
光学系统的像方基本参数结构示意图
工业镜头光学系统的成像质量客观评价
光学系统大口径摄影镜头设计原理
如何检测光学系统的纵向色差

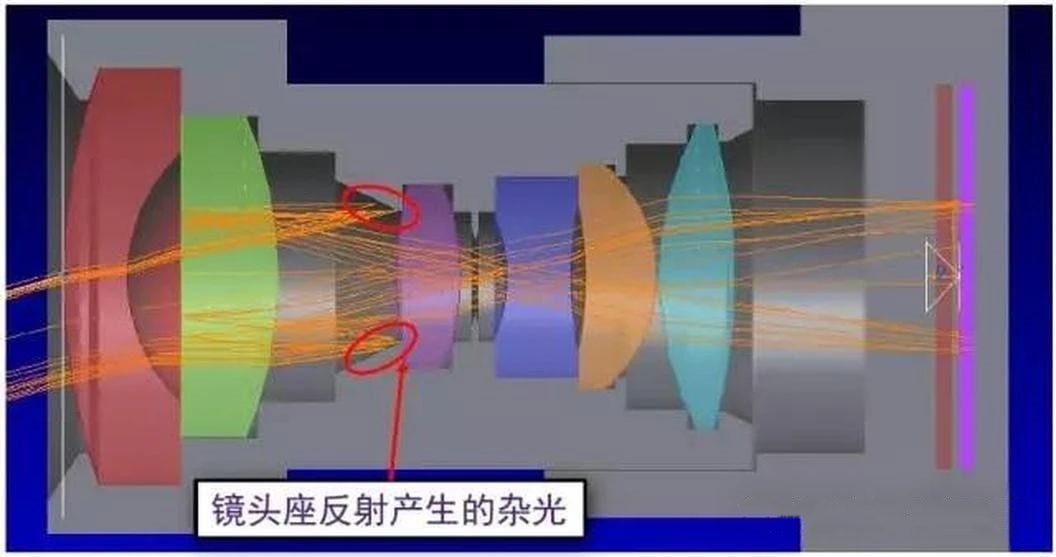
光学设计中的杂散光
光学系统无热化技术的三个大类

基于超导单光子探测器的红外光学系统噪声分析和优化







 工商网监
工商网监
评论