 带你重新认识了一下真正的PID
带你重新认识了一下真正的PID
网上关于PID算法的文章很多,但是感觉有必要自己再进行一次总结,抽丝剥茧地重新认识了一下PID;
1 前言
2 开环控制
3 闭环控制
4 PID
4.1 系统架构
4.2 理论基础
4.3 离散化
4.4 伪算法
5 C++实现
6 总结
1 前言
控制系统通常根据有没有反馈会分为开环系统和闭环系统,在闭环系统的控制中,PID算法非常强大,其三个部分分别为;
P:比例环节;
I:积分环节;
D:微分环节;
PID算法可以自动对控制系统进行准确且迅速的校正,因此被广泛地应用于工业控制系统。
2 开环控制
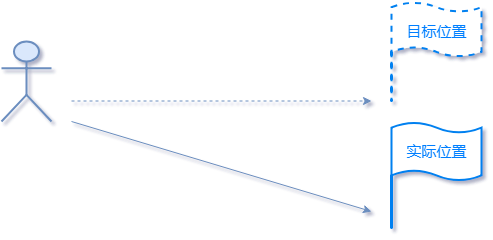
首先来看开环控制系统,如下图所示,隆哥蒙着眼,需要走到虚线旗帜所表示的目标位置,由于缺少反馈(眼睛可以感知当前距离和位置,由于眼睛被蒙上没有反馈,所以这也是一个开环系统),最终隆哥会较大概率偏离预期的目标,可能会运行到途中实线旗帜所表示的位置。
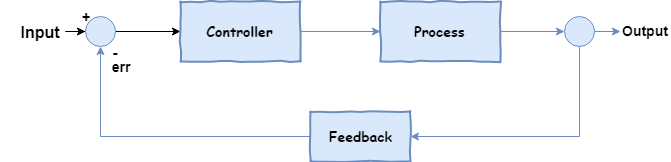
开环系统的整体结构如下所示;

这里做一个不是很恰当的比喻;
Input:告诉隆哥目标距离的直线位置(10米);
Controller:隆哥大脑中计算出到达目标所需要走多少步;
Process:双腿作为执行机构,输出了相应的步数,但是最终仍然偏离了目标;
看来没有反馈的存在,很难准确到达目标位置。
3 闭环控制
所以为了准确到达目标位置,这里就需要引入反馈,具体如下图所示;
在这里继续举个不怎么恰当的比喻;隆哥重获光明之后,基本可以看到目标位置了;
第一步Input:告诉隆哥目标距离的直线位置(10米);
第二步Controller:隆哥大脑中计算出到达目标所需要走多少步;
第三步Process:双腿作为执行机构,输出了相应的步数,但是最终仍然偏离了目标;
第四步Feedback:通过视觉获取到目前已经前进的距离,(比如前进了2米,那么还有8米的偏差);
第五步err:根据偏差重新计算所需要的步数,然后重复上述四个步骤,最终隆哥达到最终的目标位置。
4 PID
4.1 系统架构
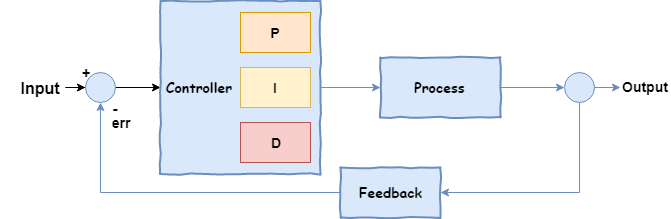
虽然在反馈系统下,隆哥最终到达目标位置,但是现在又来了新的任务,就是又快又准地到达目标位置。所以这里隆哥开始采用PID Controller,只要适当调整P,I和D的参数,就可以到达目标位置,具体如下图所示;
隆哥为了最短时间内到达目标位置,进行了不断的尝试,分别出现了以下几种情况;
跑得太快,最终导致冲过了目标位置还得往回跑;
跑得太慢,最终导致到达目标位置所用时间太长;
经过不断的尝试,终于找到了最佳的方式,其过程大概如下图所示;
这里依然举一个不是很恰当的比喻;
第一步:得到与目标位置的距离偏差(比如最开始是10米,后面会逐渐变小);
第二步:根据误差,预估需要多少速度,如何估算呢,看下面几步;
P比例则是给定一个速度的大致范围,满足下面这个公式;
因此比例作用相当于某一时刻的偏差(err)与比例系数的乘积,具体如下所示;
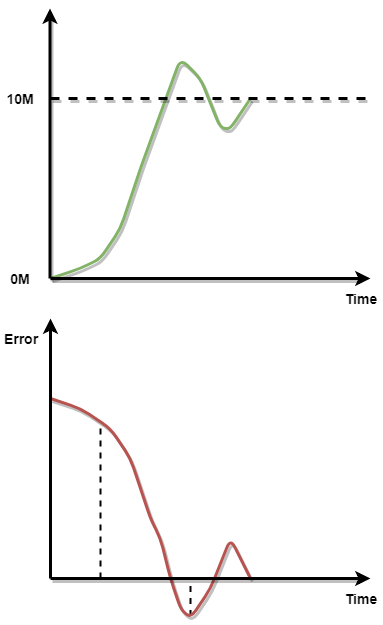
比例作用
绿色线为上述例子中从初始位置到目标位置的距离变化;红色线为上述例子中从初始位置到目标位置的偏差变化,两者为互补的关系;
I积分则是误差在一定时间内的和,满足以下公式;
如下图所示;
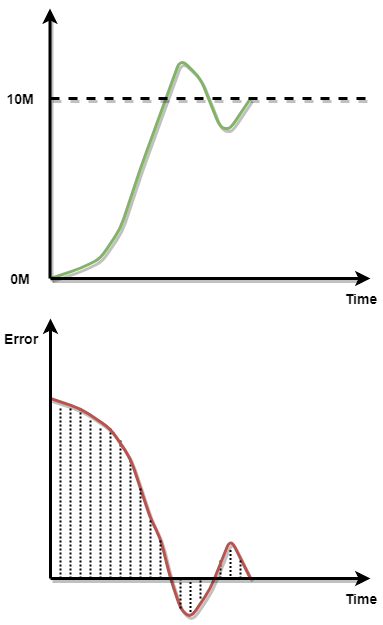
红色曲线阴影部分面积即为积分作用的结果,其不断累积的误差,最终乘以积分系数就得到了积分部分的输出;
D微分则是误差变化曲线某处的导数,或者说是某一点的斜率,因此这里需要引入微分;
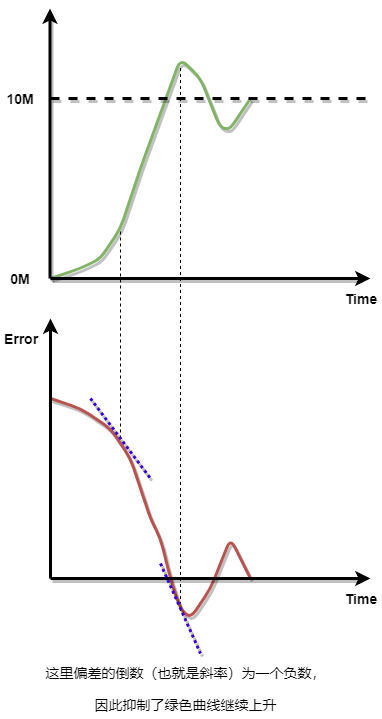
从图中可知,当偏差变化过快,微分环节会输出较大的负数,作为抑制输出继续上升,从而抑制过冲。
综上,,分别增加其中一项参数会对系统造成的影响总结如下表所示;
| 参数 | 上升时间 | 超调量 | 响应时间 | 稳态误差 | 稳定性 |
|---|---|---|---|---|---|
| Kp | 减少 | 增加 | 小变化 | 减少 | 降级 |
| Ki | 减少 | 增加 | 增加 | 消除 | 降级 |
| Kd | 微小的变化 | 减少 | 减少 | 理论上没有影响 | 小,稳定性会提升 |
4.2 理论基础
上面扯了这么多,无非是为了初步理解PID在负反馈系统中的调节作用,下面开始推导一下算法实现的具体过程;PID控制器的系统框图如下所示;
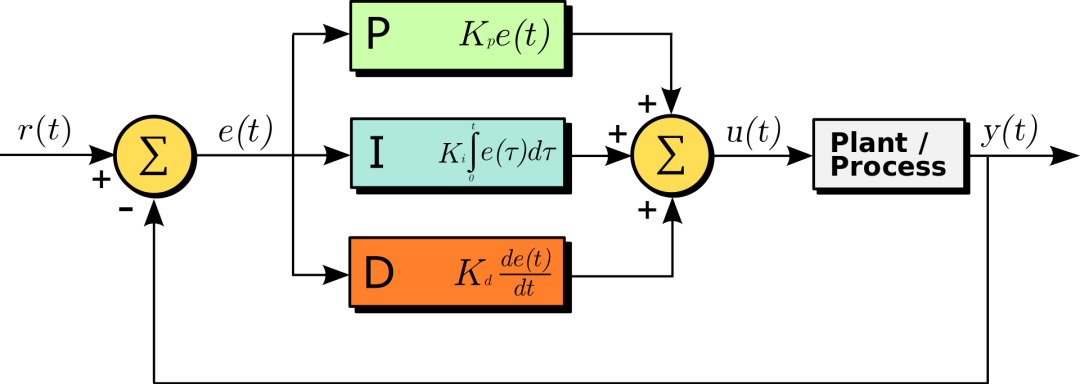
图片来自Wiki
因此不难得出输入和输出的关系;
是比例增益;是积分增益;是微分增益;
4.3 离散化
在数字系统中进行PID算法控制,需要对上述算法进行离散化;假设系统采样时间为则将输入序列化得到;
将输出序列化得到;
比例项:离散化
积分项:
微分项:
所以最终可以得到式①,也就是网上所说的位置式PID:
将式①再做一下简化;
最终得到增量式PID的离散公式如下:
4.4 伪算法
这里简单总结一下增量式PID实现的伪算法;
previous_error:=0//上一次偏差 integral:=0//积分和 //循环 //采样周期为dt loop: //setpoint设定值 //measured_value反馈值 error:=setpoint−measured_value//计算得到偏差 integral:=integral+error×dt//计算得到积分累加和 derivative:=(error−previous_error)/dt//计算得到微分 output:=Kp×error+Ki×integral+Kd×derivative//计算得到PID输出 previous_error:=error//保存当前偏差为下一次采样时所需要的历史偏差 wait(dt)//等待下一次采用 gotoloop
5 C++实现
这里是增量式PID算法的C语言实现;
pid.cpp
#ifndef_PID_SOURCE_ #define_PID_SOURCE_ #include
pid.h
#ifndef_PID_H_ #define_PID_H_ classPIDImpl; classPID { public: //Kp-proportionalgain //Ki-Integralgain //Kd-derivativegain //dt-loopintervaltime //max-maximumvalueofmanipulatedvariable //min-minimumvalueofmanipulatedvariable PID(doubledt,doublemax,doublemin,doubleKp,doubleKd,doubleKi); //Returnsthemanipulatedvariablegivenasetpointandcurrentprocessvalue doublecalculate(doublesetpoint,doublepv); ~PID(); private: PIDImpl*pimpl; }; #endif
pid_example.cpp
#include"pid.h" #include
编译并测试;
g++-cpid.cpp-opid.o #Tocompileexamplecode: g++pid_example.cpppid.o-opid_example
6 总结
本文总结了PID控制器算法在闭环系统中根据偏差变化的具体调节作用,每个环节可能对系统输出造成什么样的变化,给出了位置式和增量式离散PID算法的推导过程,并给出了位置式算法的C++程序实现。
由于作者能力和水平有限,文中难免存在错误和纰漏,请不吝赐教。
责任编辑:YYX
-
PID算法
+关注
关注
2文章
172浏览量
24301 -
PID
+关注
关注
35文章
1472浏览量
85471 -
开环控制
+关注
关注
2文章
29浏览量
5116
原文标题:简易PID算法的快速扫盲
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
最近在网上认识了一位大神,跟着他让我的生活高了不止一个档次
最近在网上认识了一个大神,跟着他让我生活提高了不止一个档次
电力电子技术向高频领域发展应重新认识的概念







 工商网监
工商网监
评论