 惯性导航在GNSS导航中的应用
惯性导航在GNSS导航中的应用
惯性导航系统(INS,以下简称惯导)是一种不依赖于外部信息、也不向外部辐射能量的一种自主式导航系统,主要由陀螺仪和加速度计两部分组成。
一、什么是惯性导航
惯性导航系统(INS,以下简称惯导)是一种不依赖于外部信息、也不向外部辐射能量的一种自主式导航系统,不过这个名词本身与GNSS(全球导航卫星系统)导航没有任何关系。
惯导系统由陀螺仪和加速度计两部分组成:
1.陀螺仪有稳定指向一个方向的性质,并且不与外界的运动相关联。将这样的设备装在方向发生转动的物体上时,就可以测量出物体转动的角度。
2.加速度计能够测出物体运动的加速度值,配合时间记录,根据s=(1/2)a*t^2即可计算出距离。至于说加速度值一致在变化?那就积分呗。
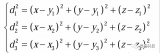
三轴陀螺仪分别指向坐标轴中的xyz轴,在这三轴上再加上加速度计,就组成了惯性导航装置。通过三轴角度变化,三轴距离累计,就可以测量出物体在三维空间中的三轴位置移动,即三维空间位移,但是你会发现这样的装置只能测量出相对位移,即在时间记录中某两个时刻之间的位移。
二、惯导与GNSS导航
GNSS导航,是根据GPS/BD提供的位置信息,以及导航前规划的线路,指引用户行驶的一个系统。
我们知道,GPS/BD是通过接收卫星发送的信号计算出自身位置的,当卫星被遮挡后,定位设备就无法定位了。遮挡可能是多种情况,比如经过高架桥、隧道等。这时候可能会出现导航中的车位图标不动了,直到车开到开阔地带会看到位置一下子跳过去。
另外也会通过速度、时间、距离的关系,根据最后一次卫星信号计算的速度,来推测可能的位置从而继续实现导航。但是如果车辆加减速变化较大时,最终推测位置和当前实际位置偏差也会很大,但不管怎样这都会带给用户不好的体验。
而惯导与GNSS相组合的应用,既解决了GNSS设备在丢星情况下失去导航位置的问题,又解决了单纯惯导设备只有相对位移的困扰。在GNSS设备定位精度下降时,使用惯导设备补偿计算导航位置;在惯导设备精度下降时,使用GNSS设备补偿计算位置。
在导航领域,GNSS跟惯导的结合能很好地解决了隧道、高楼、桥底或者树林等遮挡环境下的定位行驶问题。不过由于惯导设备也有其自身的技术缺点(影响惯导系统误差的主要是时间和温度,并且累加起来的误差很容易扩大),所以长时间的导航仍然有很大的困难。
如今,GNSS已成为众多应用程序中的领先定位技术,并且在过去30年中,地理空间行业的技术进步令人印象深刻。简而言之,迄今为止已引入了三种不同的GNSS解决方案:高端RTK流动站,手持式GIS数据收集器和机器控制系统。
责任编辑:YYX
- GNSS
+关注
关注
9文章
682浏览量
47546 - 惯性导航
+关注
关注
2文章
53浏览量
13372
发布评论请先登录
相关推荐
AGV小车上的惯性导航模块运用——SGPM02

【行业前沿】量子技术+惯性导航,美国海军研究实验室的最新研究成果
导远科技在北京车展展示其自主研发的新一代MEMS惯性导航芯片

GNSS模块的惯导技术:引领定位科技的前沿
GNSS模块在不同的领域运用范围
GNSS定位导航原理详解
GNSS天线设计的基本原理

华测导航:不断优化核心算法,同时布局车规级芯片
MEMS陀螺仪系统的精确导航
广和通与华大北斗达成全球战略合作,携手打造高精度GNSS定位解决方案
全球导航卫星系统GNSS包括哪些
高精度GNSS定位定向模组M20D实现无人配送车导航定位的原理

惯性导航系统高精度定位定向模组M20助力无人驾驶车辆隧道精准导航






 工商网监
工商网监
评论