 8个蓝牙小车的设计方案
8个蓝牙小车的设计方案
蓝牙技术是一种无线数据和语音通信开放的全球规范,它是基于低成本的近距离无线连接,为固定和移动设备建立通信环境的一种特殊的近距离无线技术连接。当蓝牙邂逅智能车会摩擦出怎样的作品呢,整理了8个蓝牙小车的设计方案,想拥有一辆自己的蓝牙小车就动起来吧。
1、基于51单片机的蓝牙风扇智能小车设计-蓝牙-L298N-红外避障-(电路图+程序源码)
本设计由STC89C52单片机电路+蓝牙模块电路+L298N电机驱动电路+DS18B20温度检测电路+风扇控制电路+红外避障传感器模块电路+电池盒电路组成。
1、通过手机APP可以控制智能车的前进、后退、左转、右转。
2、通过DS18B20检测温度,通过红外避障传感器检测是否有障碍。
当红外避障传感器检测到有障碍时,如果温度低于40℃,风扇不转。温度在40-60℃之间,风扇缓慢转动。温度在60℃以上,风扇全速转动。
当红外避障传感器没有检测到障碍物时,风扇不转。

方案链接:请点击“阅读原文跳转”
2、基于Arduino Nano设计的蓝牙控制机器人智能小车(电路图)
该开发板具有双电机驱动器和一些额外的Arduino引脚(3V,5V,GND输出),因此,使用此PCB,您可以通过更改Arduino代码来制作线路跟随器,避障器,寻边器,语音控制和其他Arduino机器人。
我已经制作了一个蓝牙控制机器人车,所以我在描述如何制作蓝牙控制Arduino机器人或车。

方案链接:请点击“阅读原文跳转”
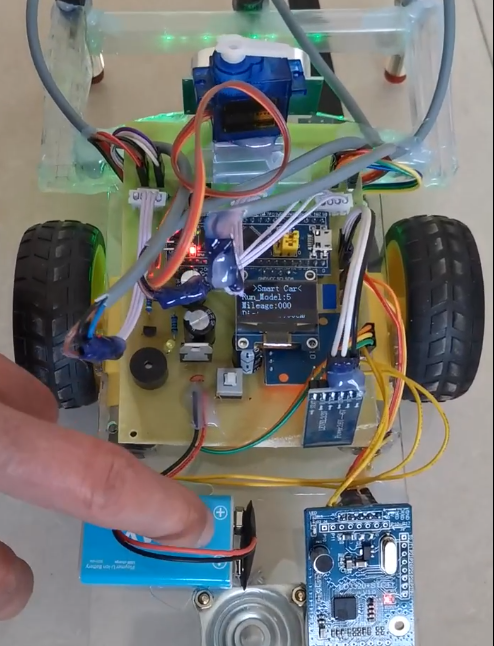
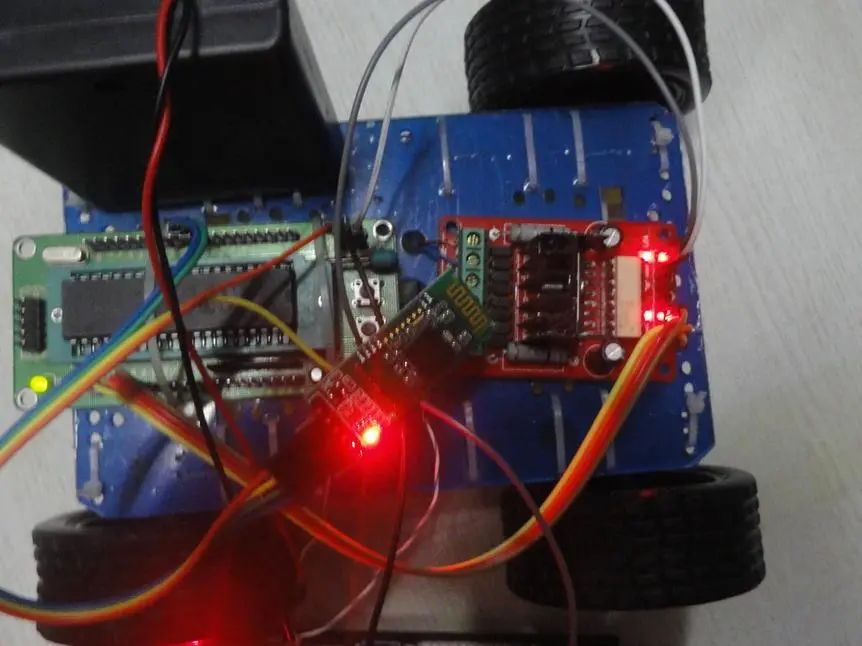
3、基于stm32循迹避障语音控制金属探测蓝牙小车设计(原理图+pcb+源码+参考文档)
小车具有检测里程功能,在金属探测模式,槽型光耦会检测小车车轮的圈数,以此来计算小车行走的里程,并可以通过OLED屏幕显示出来。还可以显示小车的工作模式以及小车距离前方障碍物的距离。
》默认模式:默认为语音控制模式。通过语音控制。可以实现切换到避障模式、金属探测模式、语音控制模式、蓝牙遥控模式、循迹模式。
》避障模式:核心板通过超声波传感器检测前方距离,驱动小车电机进行前进、后退、左右转等操作,且在小车前进时检测前方距离,若小于20cm则自动右转以达到避障目的。
》金属探测模式:小车同时驱动舵机在扫描到金属时,根据金属探测模块探测到的位置,驱动舵机指针指向检测到金属方向,在金属探测模式,自动开启避障功能。
》语音控制模式:小车受控于语音识别模块。距离小车较近处,呼叫“小车”,待看到LD3320语音识别模块亮2个灯时,呼叫“前进”、“后退”、“左转”、“右转”、“停止”即可对小车进行控制,特别注意:语音控制受环境噪声影响比较大,所以在小车行驶过程中,由于小车电机的噪音,是语音控制识别较困难,反应不灵敏,故应近距离大声呼叫,或者重启小车电源,进行重新语音控制。
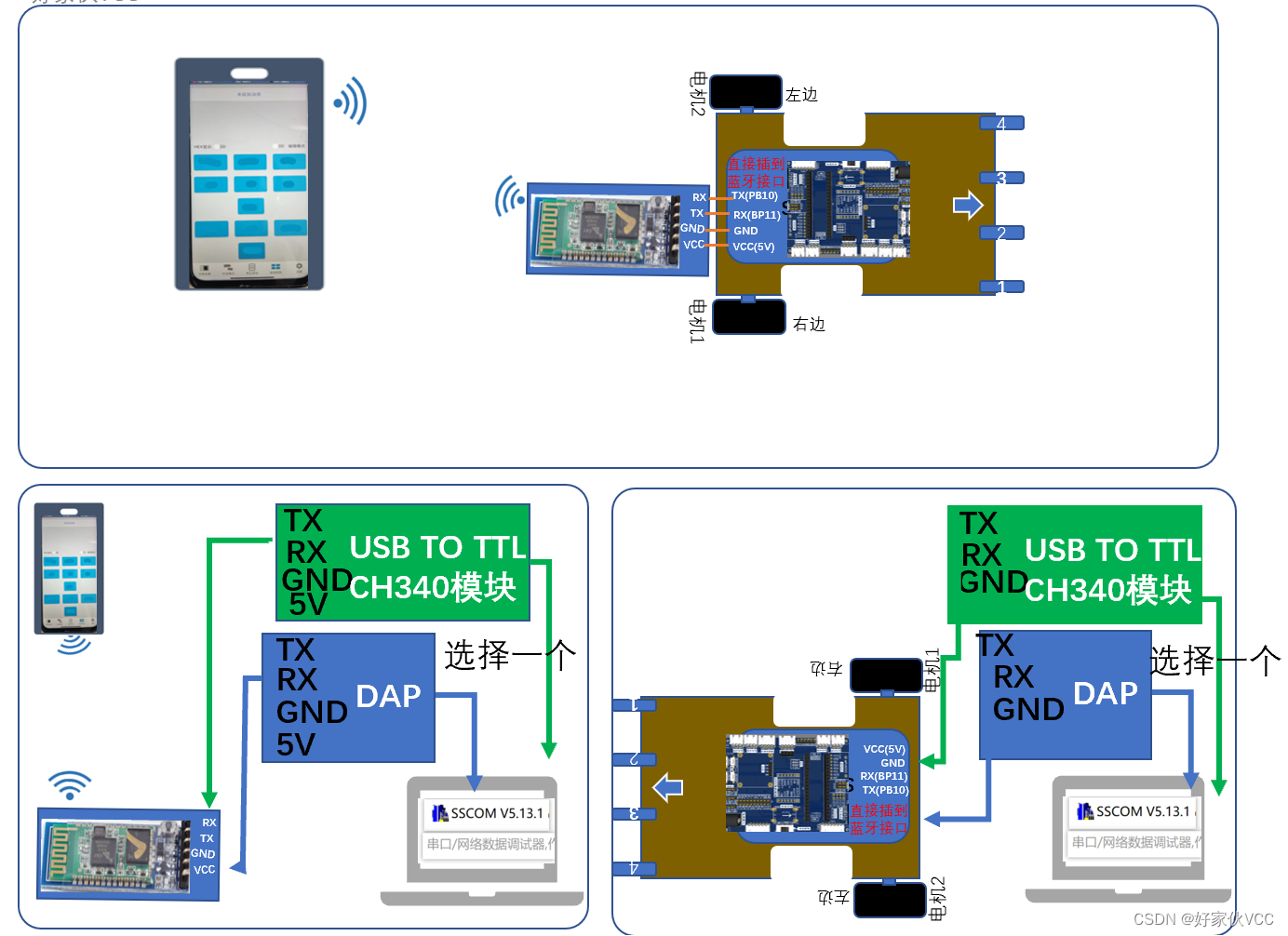
》蓝牙遥控模式:打开手机蓝牙,并打开控制小车的APP,手机连接小车的蓝牙,连接成功后,即可控制小车“前进”、“后退”、“左转”、“右转”、“停止”。并可控制小车速度。
》循迹模式:在循迹模式。需要有循迹的线路才可以,用黑色的胶带在地上粘出线路出来,然后将小车放在黑线的上面,小车就会沿黑色的线条进行行走。
方案链接:请点击“阅读原文跳转”
4、蓝牙小车
通过手机蓝牙遥控小车行走的软、硬件设计。手机蓝牙作为客户端,小车上的蓝牙模块HC-06作为服务端。客户端采用Eclipse开发环境,JAVA编程,服务端采用单片机控制。双方通过串口进行通信,单片机驱动直流电机控制小车行动。实验结果表明,小车可以接收手机遥控信号并灵活地进行前行、倒退、左转、右转和停止等功能。
责任编辑:lq
-
蓝牙
+关注
关注
114文章
5807浏览量
170181 -
智能车
+关注
关注
21文章
403浏览量
76951 -
模块电路
+关注
关注
3文章
33浏览量
11455
原文标题:围观蓝牙与智能车的碰撞,8个顶配蓝牙小车方案
文章出处:【微信号:cirmall,微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
自适应蓝牙控制智能小车
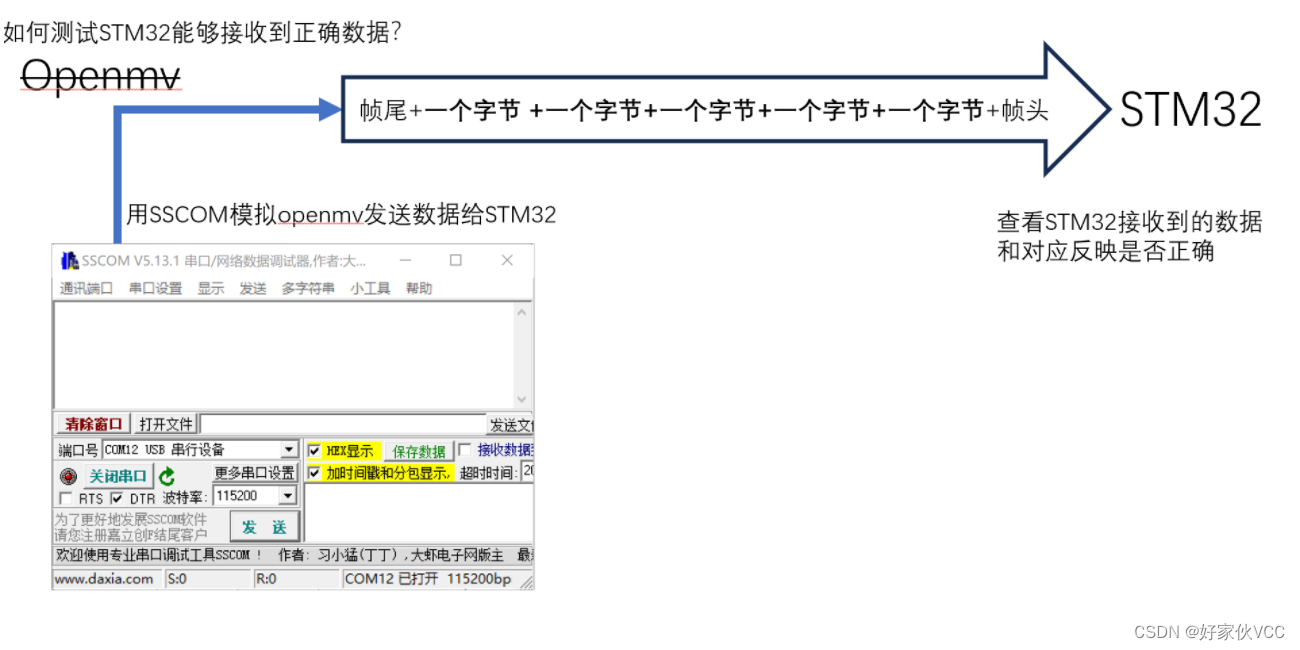
19.3-星曈科技 openmv Hopenmv发送五个uchar Openmv+STM32F103C8T6视觉巡线小车 STM32循迹小车系列教程
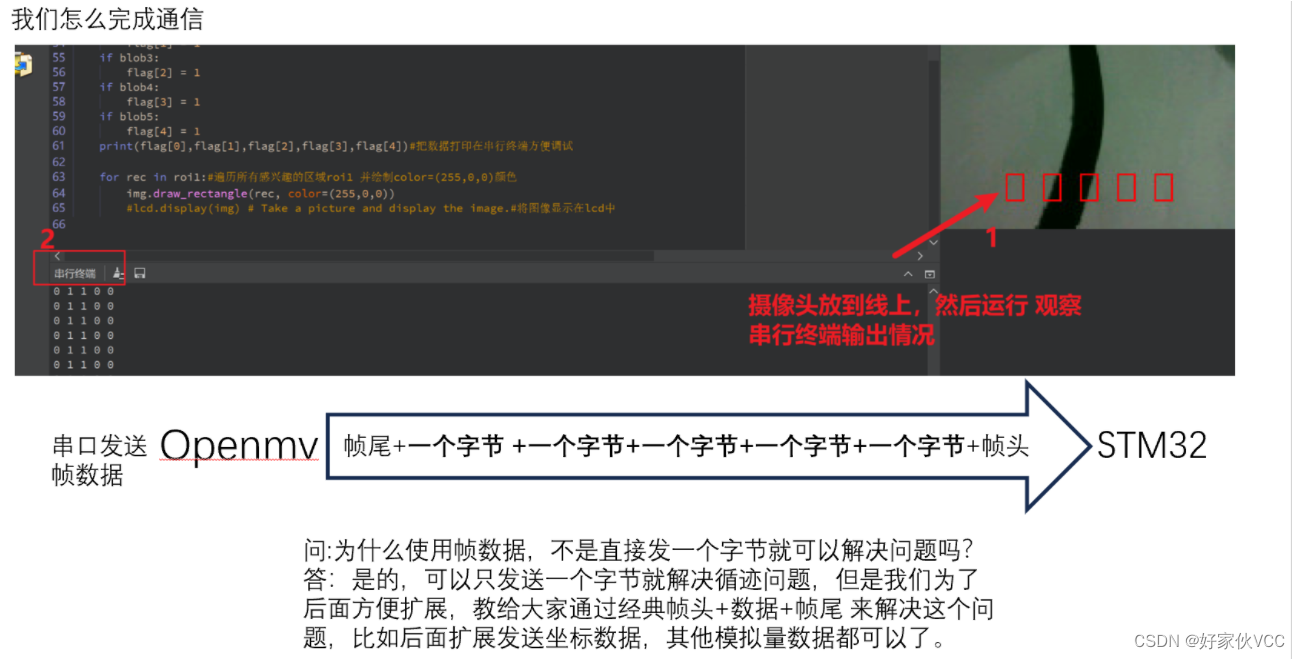
19.4-STM32接收数据-状态显示在屏幕 openMV寻迹与小车控制 Openmv+STM32F103C8T6视觉巡线小车
复杂电磁环境模拟系统设计方案
电磁频谱数据综合管理系统设计方案
电磁频谱管理系统设计方案
电磁轨迹预测分析系统设计方案
UPS系统设计方案解读

【项目展示】基于CW32的遥控循迹小车

最新蓝牙音频方案选型表

基于瑞萨RA2E1 MCU芯片的蓝牙平衡小车设计






 工商网监
工商网监
评论