 典型的Truesense成像线性CCD的输出放大器噪声
典型的Truesense成像线性CCD的输出放大器噪声
在理想的数码相机中,CCD的噪声性能决定着输出图像的动态范围。噪声有两种主要类型:时间噪声和空间噪声。尽管可以使用差分技术来补偿空间噪声,但时间噪声却无法提供这种机会。
散粒噪声是一种时间噪声,它是由光子随机到达传感器引起的。噪声与收集的光子数的平方根成比例。因此,收集更多的光子,意味着更长的曝光时间或传感器上更大的像素,意味着更高的SNR。例如,具有100个电子的信号具有10个散粒噪声电子。这是自然界对噪声的下限:假设成像仪中的所有其他部件都是完美的,则总噪声将永远不会低于此。
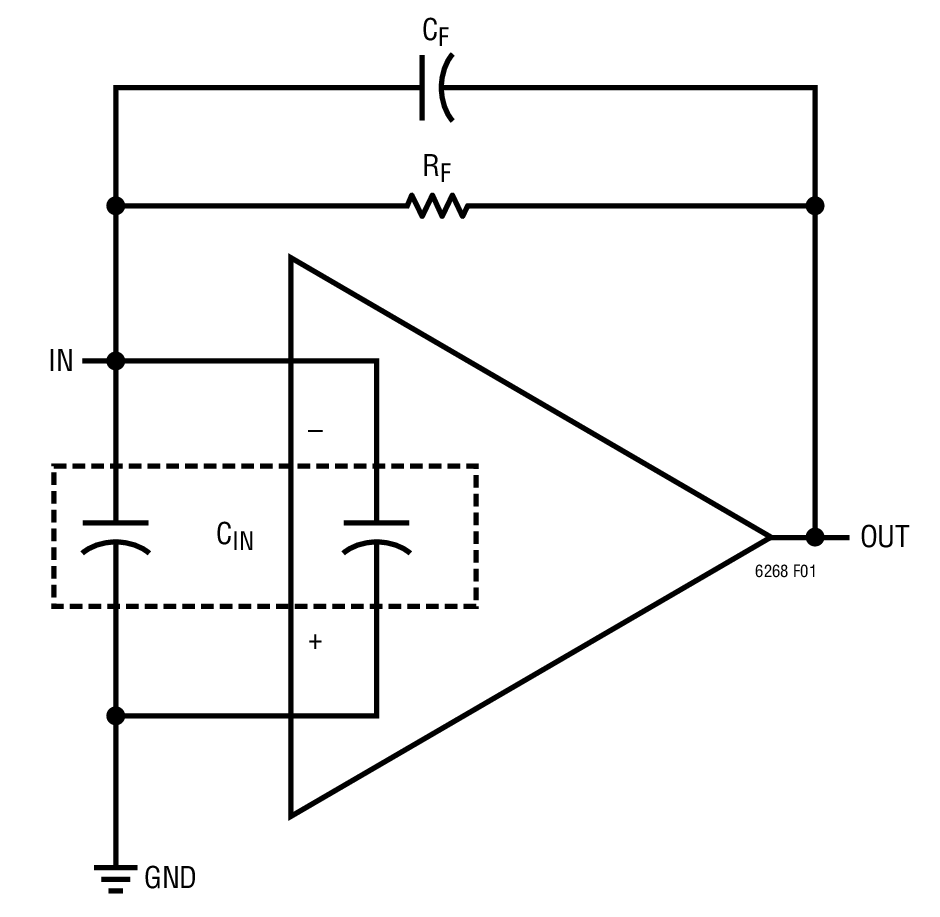
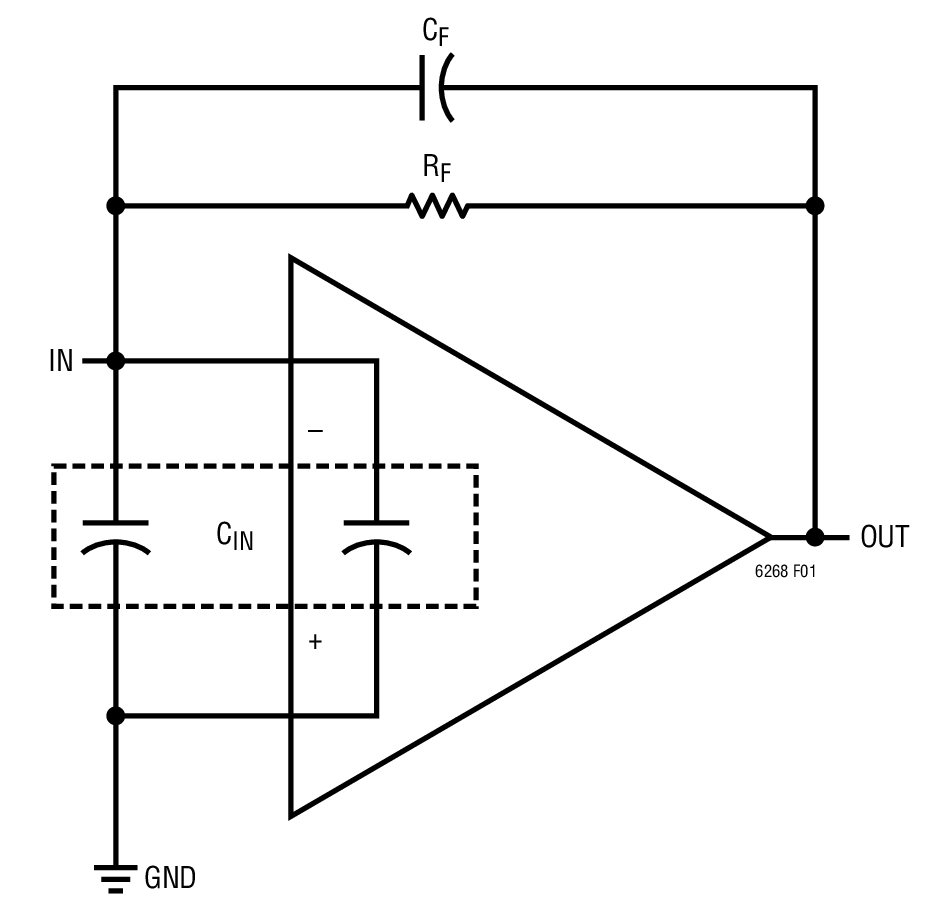
有两个暂时的白噪声源:复位噪声和输出放大器噪声。在这两种情况下,噪声源都是电阻。使用相关双采样之类的技术几乎可以消除复位噪声。降低放大器输出电阻并增加放大器增益可以减轻输出放大器的白噪声。同样,低通滤波可以减少有效信号带宽,从而减少产生的噪声。
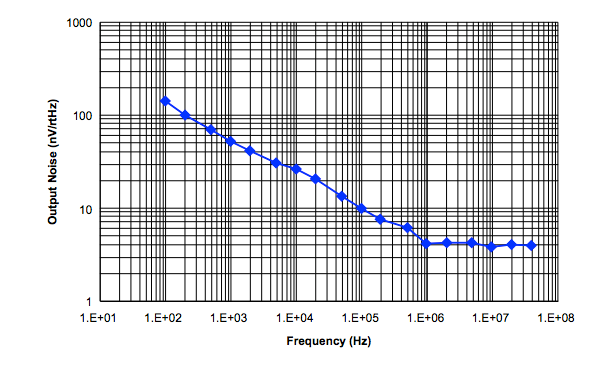
有源硅器件还存在暂时的闪烁噪声,有时称为1 / f噪声。对于低于转折频率的频率,此1 / f噪声支配噪声功率,而对于高于转折频率的频率,此噪声支配噪声。在转折频率以下,频率每降低十倍,噪声功率就会增加十倍。闪烁噪声是由氧化硅界面处的陷阱引起的。捕获在这些陷阱中的电子会阻碍电流的流动,就像流中的卵石一样。
暂时的暗电流散粒噪声可能来自两个来源:表面或整体。无论哪种情况,噪声电流产生部位都会引入“禁止”能量状态,这些状态使电子能够利用热能从价态跃迁到导带。这些电子然后添加到累积的信号中。表面暗电流散粒噪声是体积噪声的100倍。这些表面暗电流产生位点也位于氧化硅界面附近。表面暗电流散粒噪声可通过反向操作降低。大量暗电流散粒噪声产生部位出现在耗尽区边界附近。生成位点的数量是整体硅中金属杂质的函数。
典型的Truesense成像线性CCD的输出放大器噪声
空间噪声有两种主要类型。第一个是光响应不均匀,第二个是暗电流不均匀。光响应空间噪声是由于并非每个像素都对光具有同等响应这一事实而产生的。可以通过从所需图像中减去“平场”图像来消除这种噪声。暗电流空间噪声是由于所有像素均产生不同数量的暗电流噪声而产生的。也可以通过从所需图像中减去深色参考图像来减少这种噪声。但是由于一些暗噪声是散粒噪声,因此在执行微分时,该噪声将增加两倍的平方根。
编辑:hfy
- 传感器
+关注
关注
2541文章
49561浏览量
745778 - 放大器
+关注
关注
143文章
13353浏览量
211590 - CCD
+关注
关注
32文章
866浏览量
141701 - 成像仪
+关注
关注
0文章
77浏览量
15444
发布评论请先登录
相关推荐
放大器噪声的来源
线性功率放大器设计和乙类和丙类功率放大器设计
怎么设计高线性低噪声放大器?
CCD成像原理
放大器的噪声
低噪声放大器原理
跨阻放大器中的噪声参数及因素考虑
如何计算仪表放大器电路的总噪声
低噪声放大器的作用_低噪声放大器原理
典型的线性音频放大器拓扑结构
跨阻放大器噪声考虑因素





 工商网监
工商网监
评论