 清华大学研制了一种多功能感知的触觉传感器 并成功应用于垃圾分类
清华大学研制了一种多功能感知的触觉传感器 并成功应用于垃圾分类
近日,清华大学精密仪器系朱荣教授研究组在《科学机器人》(Science Robotics)发表研究论文,报道了一种多功能感知的触觉传感器,采用类皮肤的多层结构,将多模感知原位集成,实现对触感、物感、温感等多种感知的高密度集成,将触觉传感器应用于机器手抓握感知,实现了对抓握物品的形状、大小和材料等多属性识别,并成功应用于垃圾分类。
具有高灵敏和多维集成的柔性感知电子器件在医疗健康、智能机器人等领域有着广阔的应用前景。柔性电子感知,具有对周围环境和作用的感知能力,还能针对不同生理参数做出反应,可用于智能假肢和穿戴式生理监测,为医疗健康带来革命性的变化和进步;柔性感知也是智能机器人交互的关键,在仿生机器人非视觉传感技术领域有着十分重要的作用,感知和交互技术是未来机器人的重要发展方向。纵观现有国内外柔性感知传感器和系统,在高灵敏测量、多感知集成、低交叉耦合、低成本加工上仍然存在技术瓶颈,实际应用面临着巨大的挑战。
针对以上问题,清华大学朱荣教授研究组提出一种基于热感应的多维传感新机理,利用热敏膜和外界的传导/对流换热对自身电阻的调控实现了压力、温度、流场、热物性等参数的集成测量,由于采用简单的薄膜敏感结构和统一的热敏检测原理,多维感知柔性电子器件具有简单结构、集成度高、低交叉耦合、易调控、成本低等特点。研究成果以封面文章发表在Advanced Materials, 2017, 29(15), 1606151,并获得Transducers 2019国际会议的Outstanding Paper Award。研究团队将技术推广应用到健康监测和智能机器人,先后研制出新型穿戴式人体运动监测装备和机器人触觉感知系统。
穿戴式运动检测技术是外骨骼机器人、协作机器人等领域不可或缺的人机交互手段。随着信息、传感、驱动和材料技术的发展,外骨骼机器人作为助力助残设备在工业、医疗、军事领域逐渐展示出实用价值。目前,柔顺化、轻量化正成为外骨骼研究的新方向。朱荣教授研究组将多感知技术应用到穿戴机器人,研制出新型的可穿戴人体运动监测系统,采用自主原创的微型运动速度传感器结合微型惯性测量单元,发展新型的无积分数据融合算法,实现鲁棒性好、抗干扰强、长期无漂移的三维运动速度、运动加速度和肢体姿态的测量。
研究组将可穿戴运动捕捉系统应用于人体肢体动作捕捉,实现了对高动态拳击、踢腿、长跑运动等的准确实时监测。这项技术为人机协同领域提供了可行的运动监测手段,将促进外骨骼机器人、协作机器人等智能机器人的运动感知技术发展。相关研究成果以题为《可穿戴肢体运动捕捉系统》“A wearable motion capture device able to detect dynamic motion of human limbs”,发表在Nature Communications, 2020, 11, 5615,论文第一作者为清华大学精密仪器系博士后柳世强,通讯作者为清华大学朱荣教授。研究工作得到国家自然科学基金项目和国强研究院项目的资助。
图1 可穿戴人体运动监测系统
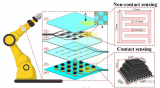
此外,面向智能机器人对触觉感知的应用需求。近日,研究组再次取得技术突破,研发出多维触觉传感器,实现触感、物感、温感等多种感知的原位集成,并将触觉传感器应用于机器人手感知系统,利用深度学习方法将感知转变为机器人对物品的认知,实现了对抓握物品形状、大小、温度和材质等多属性的高精准识别。
不同于常规触摸识别技术仅利用压力感知,研究组将力感和热物性等多模信息进行融合,使得物品识别的准确率大大提高,从基于单模压力感知的69%识别率提高到基于多模感知的96%识别率,研究组还进一步展示了利用具有多维触觉感知的机器手进行垃圾分类的应用,实现了对七类垃圾物品的高准确识别。
研究成果以题为《多维触觉传感器助力机器手物体识别》“Skin-inspired quadruple tactile sensors integrated on a robot hand enable object recognition”,发表在Science Robotics, 5, eabc8134 (2020),论文第一作者为清华大学精密仪器系博士研究生李国朕,通讯作者为清华大学朱荣教授。研究工作得到国家重点研发计划、国家自然科学基金重点项目和北京市自然科学基金重点项目的资助。
图2 多触觉感知助力智能机器人
责任编辑:xj
原文标题:清华大学在多功能感知传感器及机器人应用取得突破性进展
文章出处:【微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
-
传感器
+关注
关注
2550文章
51034浏览量
753034 -
机器人
+关注
关注
211文章
28379浏览量
206904 -
功能
+关注
关注
3文章
589浏览量
29257
原文标题:清华大学在多功能感知传感器及机器人应用取得突破性进展
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
博世与清华大学续签人工智能研究合作协议
清华大学:软体机器人柔性传感技术最新研究进展

位移传感器:原理、分类、应用与未来趋势
华中科技大学研发微型传感器,索尼预测其图像传感器市场份额明年将突破 60%
清华大学研发新型仿生三维电子皮肤系统
清华大学柔性传感器最新成果登《Science》!获新华社等权威媒体报道!
世界首款!又是清华:类脑互补视觉芯片“天眸芯”

清华大学研发成功大规模干涉-衍射异构集成芯片——太极
多功能触觉传感器及集成策略

什么是多功能传感器 多功能传感器的功能介绍

传感器分类及20种常见传感器
用于机器人物体识别和滑动检测的磁敏触觉传感器






 工商网监
工商网监
评论