 哈工大教授提出新型柔性触觉传感器阵列
哈工大教授提出新型柔性触觉传感器阵列
近日,哈工大(深圳)胡泓教授团队联合香港城市大学杨征保教授团队提出了一种基于压电薄膜、具有行+列电极结构的触觉传感器阵列,相关成果以《Skin-inspired Piezoelectric Tactile Sensor Array with Crosstalk-free Row+column Electrodes for Spatiotemporally Distinguishing Diverse Stimuli》(DOI:doi.org/10.1002/advs.202002817)为题发表于《Advanced Science》,林伟康和王标为共同第一作者。这项研究为触觉传感器设计提供了一种新的策略,有望惠及电子皮肤、健康监测、动物运动检测和机器人等领域。
近年来,柔性电子皮肤一直是学术界和业界的热门话题,其中用于模仿人体皮肤功能的仿生触觉传感器是研究的重点之一。触觉传感器能对外界的应力刺激产生对应的电信号,广泛应用在人工智能、人机交互、生物信息检测等领域。深入了解人体皮肤的感知原理,是设计仿生触觉传感器的重要前提。据了解,人体皮肤是一种非常“强大”的触觉传感器,它可以同时检测各种刺激的强度和模式,可以分辨出按压、敲击和弯曲,这主要归因于四个机械感受器(SA-I,II和FA-I,II)分布在人体皮肤的不同区域,机械感受器接收外部刺激并将其转换为电子信号,这四种受体的综合信号由大脑进行分析,进而得到物体大小、形状和质地等信息。
目前,柔性触觉传感器阵列在应用上面临着许多挑战。现有的触觉传感器阵列往往只具有单一功能,同时大面积、高分辨率的传感器阵列需要大量的电极引线。两支团队本次提出的触觉传感器阵列,可以实时感测和区分各种外部刺激的大小、位置和模式,包括轻微触碰、按压和弯曲等。与此同时,其独特的设计克服了其他压电传感器中存在的串扰问题。压力测试和弯曲测试表明,本次提出的触觉传感器阵列具有高灵敏度(7.7 mV / kPa),长期耐用性(80,000个循环周期)和快速响应时间(10 ms)的特征。触觉传感器阵列还显示出卓越的可扩展性和易于大规模制造的能力。
“该项研究主要具有三大创新点。” 胡泓介绍说,多功能触觉传感器阵列在测量压力、弯曲半径和弯曲方向的同时,还可以实时区分外部刺激的模式,实现了多种测量模式的自动解耦。同时,传感器阵列采用横纵电极结构,将电极引线数量由n×m降低至n+m,极大降低了制作成本和难度。此外,该项研究还解决了横纵电极结构在压电传感器阵列中的信号串扰问题。
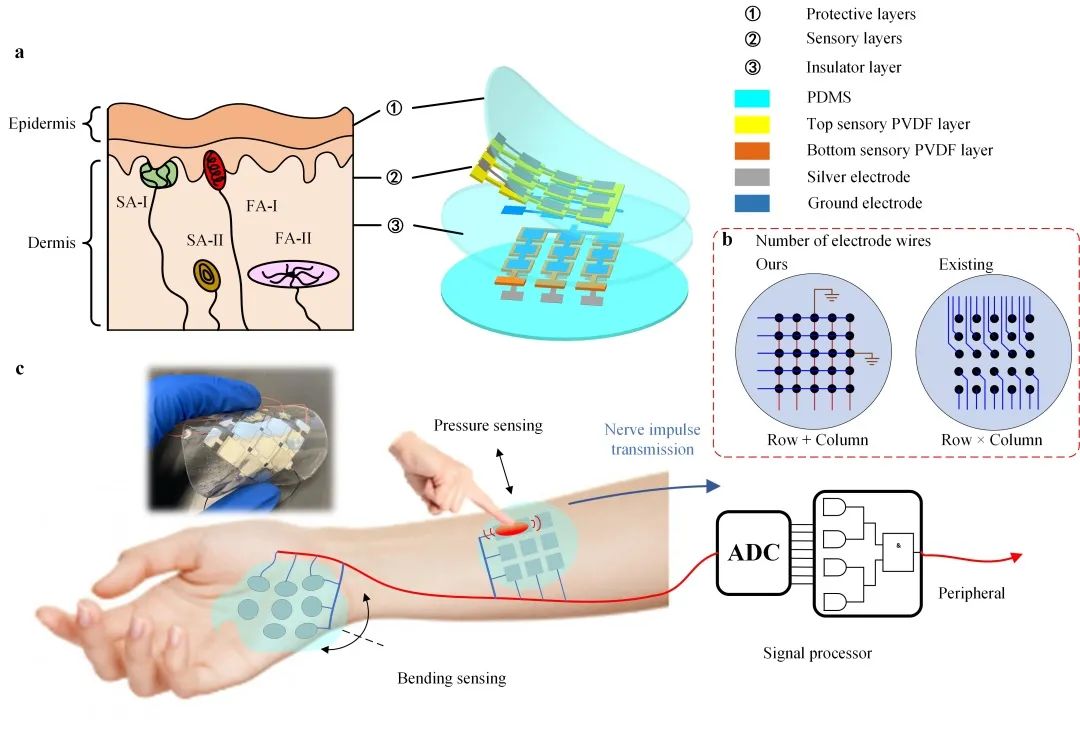
图1 基于皮肤启发的触觉传感器阵列示意图。(a)传感器阵列的多层结构设计,从上到下依次为保护层、上感知层、隔离层、下感知层、保护层。(b)传感器阵列电极引线。(c)触觉传感器阵列系统实时分辨不同模式刺激的示意图。触觉传感器阵列将外界刺激转换为电信号,电信号经过信号处理后可以实时判断外界刺激的大小和模式,进而用于外部设备。
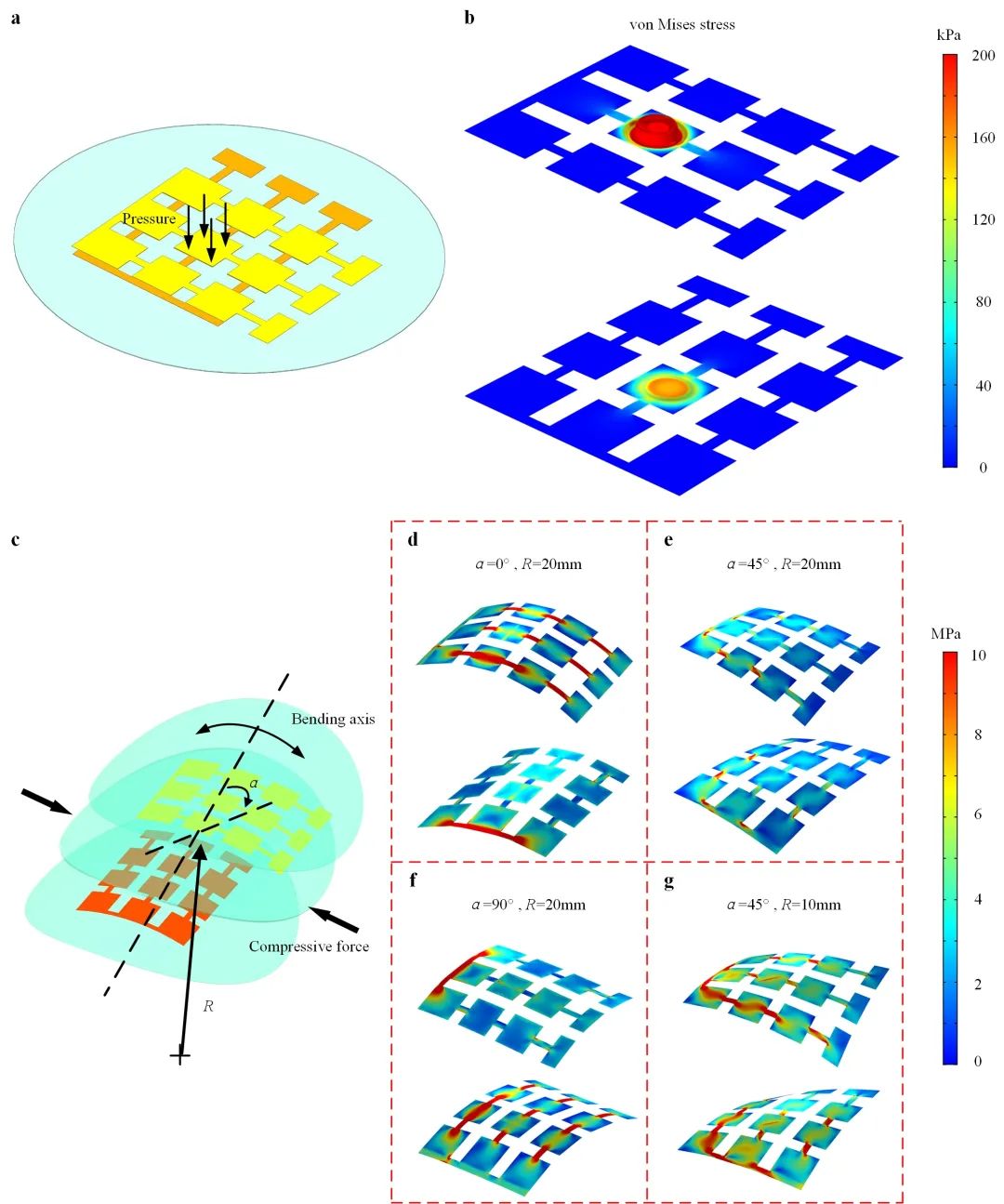
图2 不同刺激模式下触觉传感器阵列的工作机理。(a)正压力刺激模式的示意图(b)上感知层和下感知层在正压力下的应力分布。(c)弯曲刺激模式的示意图。(d-g)上感知层的应力随着弯曲角度的增大而减小,而下感知层的情况则呈现相反的趋势。两层的应力在弯曲角度为45°时近似相同。此外,较大的弯曲半径导致较大的应力。
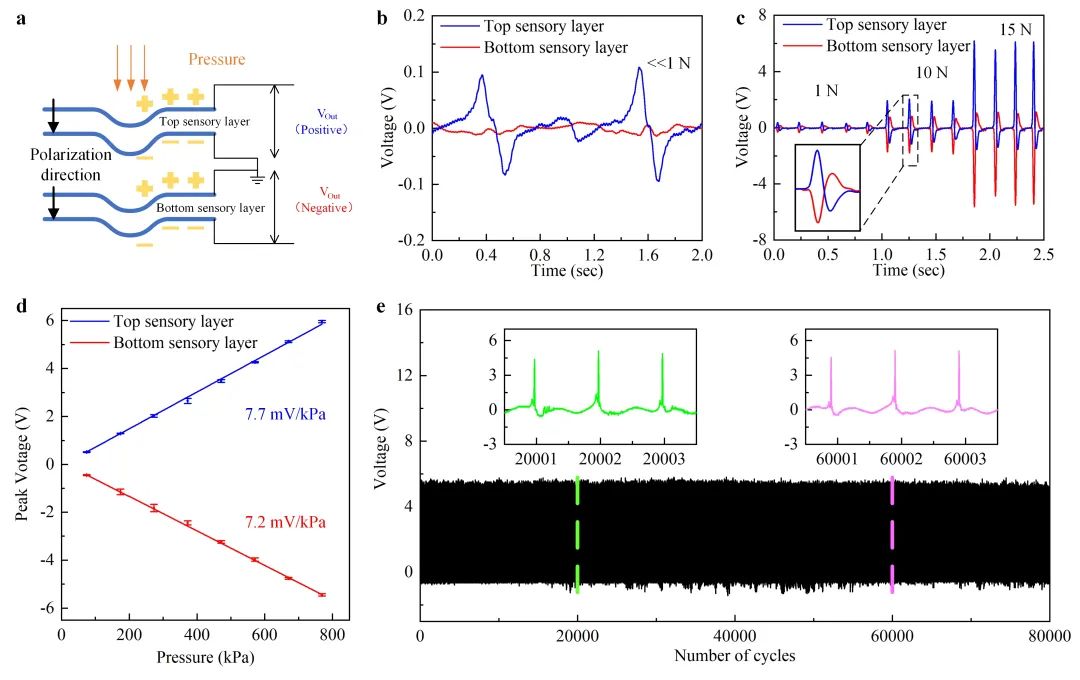
图3 触觉传感器阵列在正压力刺激模式下的测试结果。(a)压电薄膜的极化方向和触觉传感器阵列的接线方式。(b)轻微触碰下传感器输出电压波形图。(c)5 Hz频率,不同压力大小条件下,传感器输出电压波形图。(d)输出峰值电压与正压力的关系。(e)80000次耐久循环测试。
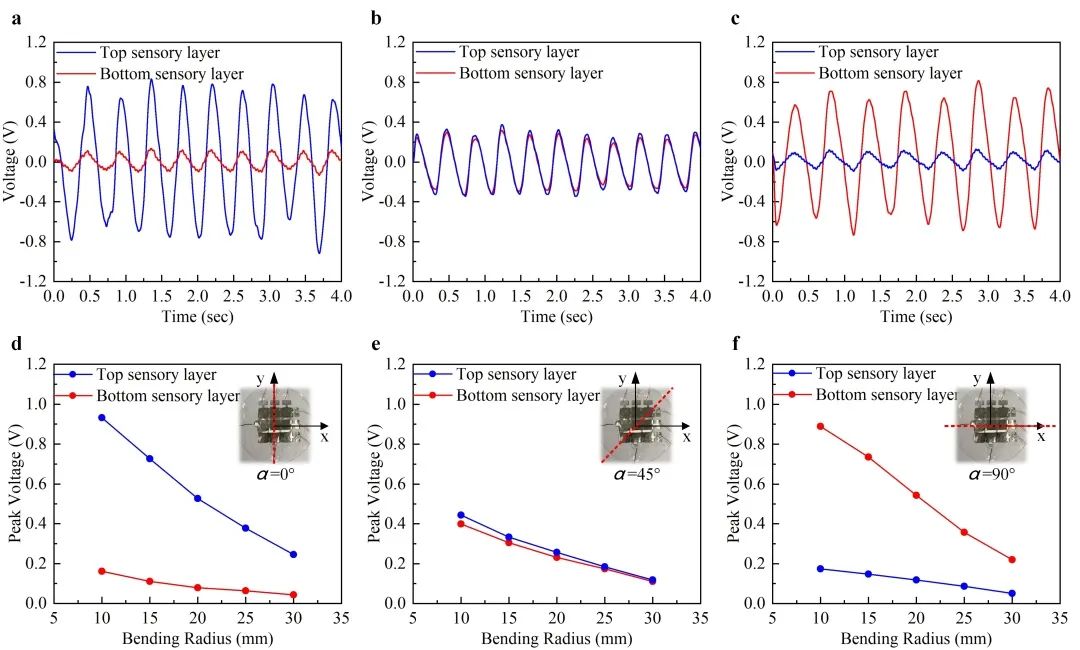
图4 触觉传感器阵列在弯曲刺激模式下的测试结果。(a-c)弯曲半径为15 mm时,传感器阵列在弯曲方向0°,45°和90°的输出电压波形图。(d-f)输出峰值电压与弯曲半径的关系。
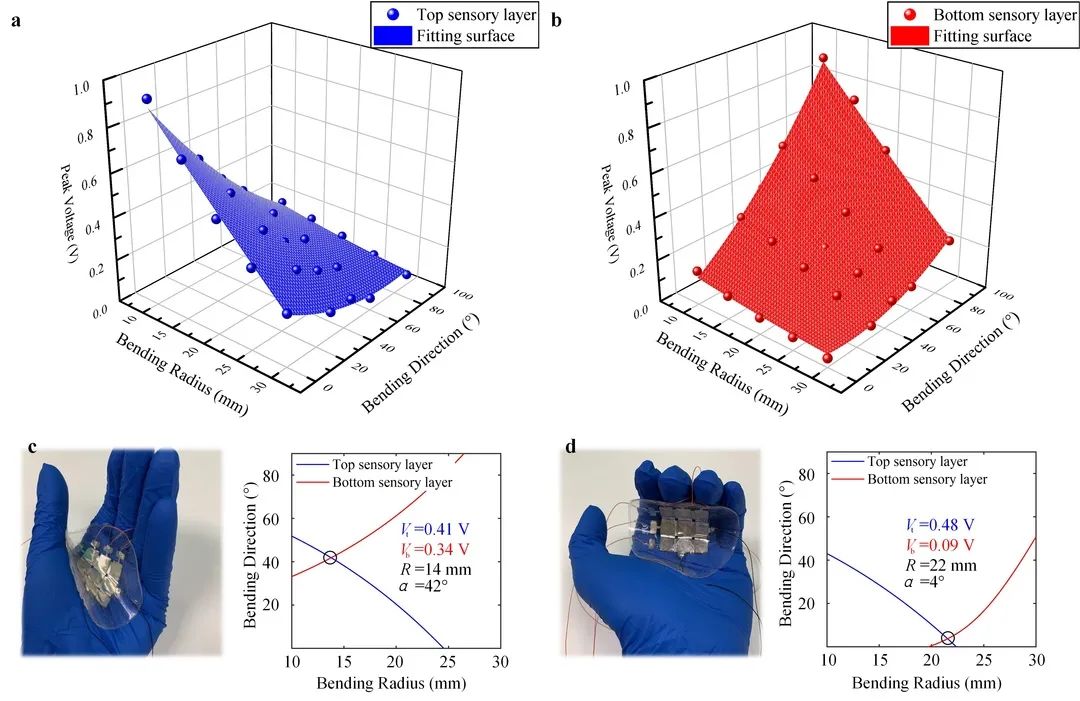
图5 传感器阵列同时测量弯曲半径和弯曲方向。(a,b)基于实验数据,对上、下感知层输出峰值电压与弯曲半径和弯曲方向的拟合结果。(c,d)通过上、下感知层的输出峰值电压计算弯曲半径和弯曲方向。
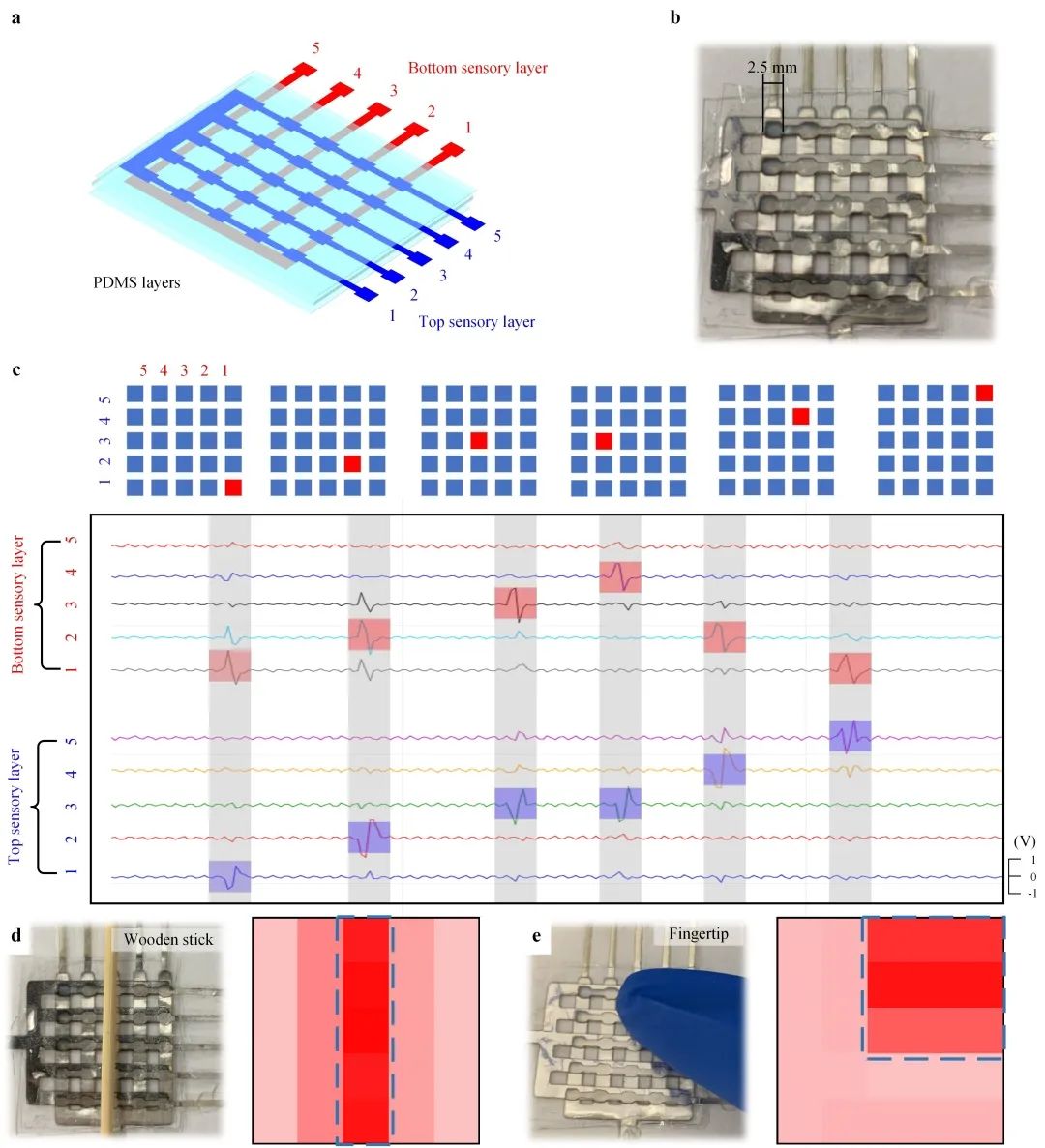
图6 大面积可拓展触觉传感器阵列及其多点检测能力的示意图。(a)5×5触觉传感器阵列的示意图。(b)5×5触觉传感器阵列的实物图,每个单元2.5×2.5 mm2。(c)单点压力测试时,传感器10通道的实时信号。(d,e)多点压力测试示意图和平面压力强度分布图。
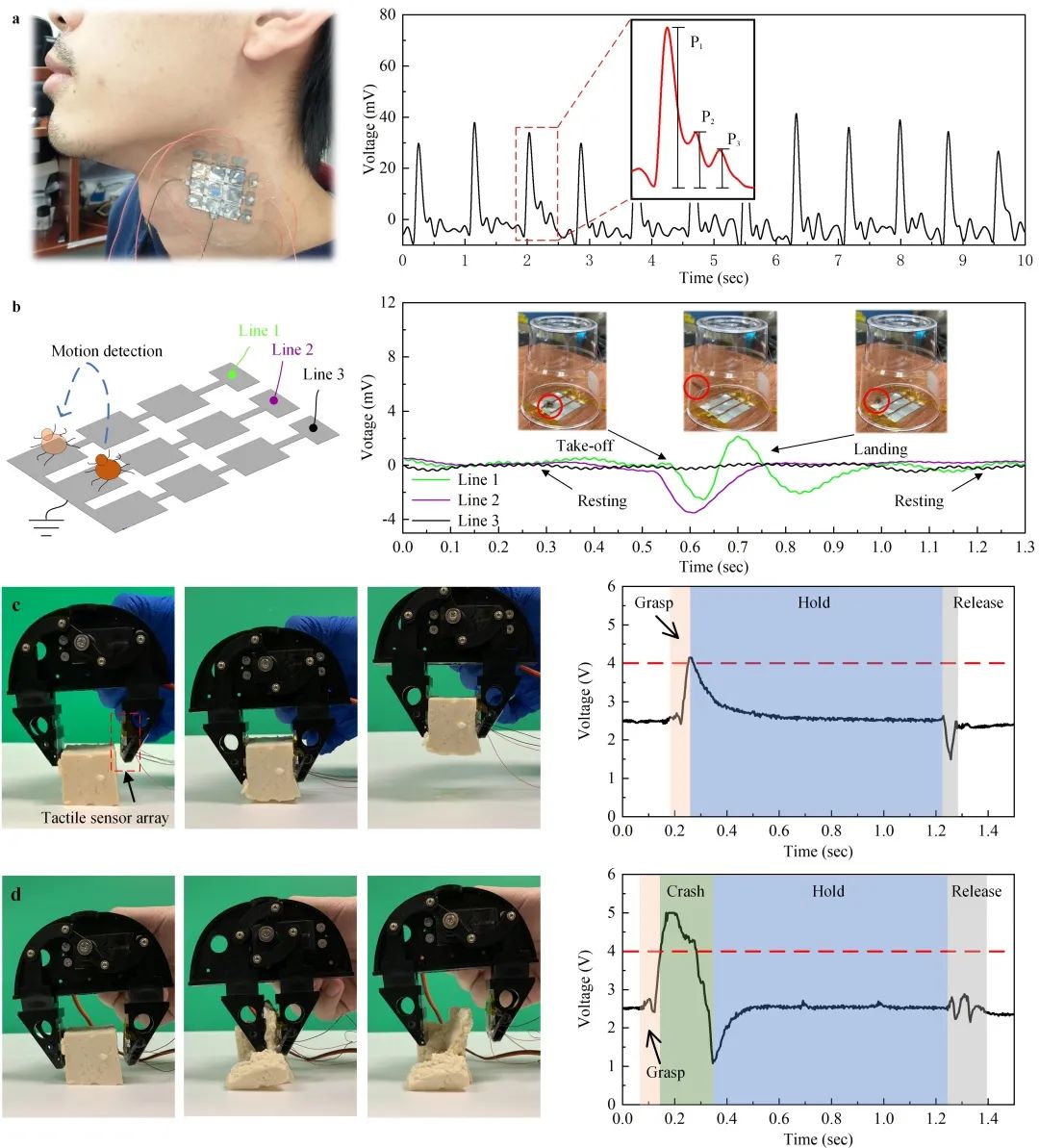
图7 触觉传感器阵列的应用。(a)检测颈动脉脉搏。(b)检测微小物体运动,小蜘蛛约重5mg,传感器阵列精确捕捉到蜘蛛的起飞和降落位置,静止时间和空中持续时间。(c)带有触觉传感器的机械手,可以平稳抓起柔软易碎的豆腐。(d)没有触觉反馈控制的情况下,将会破坏豆腐块。
《医疗柔性电子技术及市场趋势-2020版》
原文标题:新型柔性触觉传感器阵列有望惠及电子皮肤、健康检测等领域
文章出处:【微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
传感器
+关注
关注
2550文章
51034浏览量
753039 -
机器人
+关注
关注
211文章
28379浏览量
206906 -
电子皮肤
+关注
关注
3文章
108浏览量
18501
原文标题:新型柔性触觉传感器阵列有望惠及电子皮肤、健康检测等领域
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
中国科大:在机器人触觉传感器研究中取得重要进展

柔性传感器的常用材料有哪些?
触觉传感器的发展,对机器人产业有什么影响?
华工科技联合哈工大实现国内首台激光智能除草机器人落地

如何给多个X+Y(12pin),pitch0.5mm的接口的触觉传感器设计电路板?
触觉传感器新进展:从传感器制造到高级应用
多功能触觉传感器及集成策略

高德红外斩获3.34亿订单加速出海,TDK推出新型双芯片杂散场稳健3D位置传感器

工业机器人的触觉传感器有哪些?传感器作用是什么?
用于机器人物体识别和滑动检测的磁敏触觉传感器

适用于电子皮肤的柔性磁场传感器的测量原理

人形机器人柔性触觉传感器的关键技术分析
产学研交流—哈工大田艳红教授一行到访翠展微






 工商网监
工商网监
评论