 BLDC电机控制要求
BLDC电机控制要求
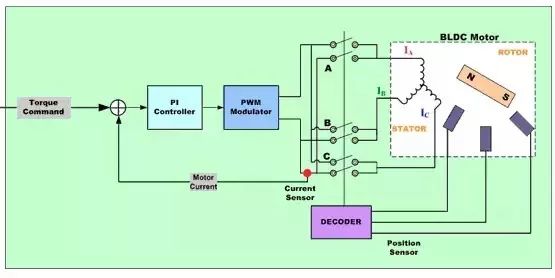
无刷电机属于自换流型(自我方向转换),因此控制起来更加复杂。BLDC电机控制要求了解电机进行整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。
BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。这就提供了最高的分辨率。如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。
许多不同的控制算法都被用以提供对于BLDC电机的控制。典型地,将功率晶体管用作线性稳压器来控制电机电压。当驱动高功率电机时,这种方法并不实用。高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。
控制算法必须提供下列三项功能:
▪用于控制电机速度的PWM电压
▪用于对电机进整流换向的机制
▪利用反电动势或霍尔传感器来预测转子位置的方法
脉冲宽度调制仅用于将可变电压应用到电机绕组。有效电压与PWM占空度成正比。当得到适当的整流换向时,BLDC的扭矩速度特性与以下直流电机相同。可以用可变电压来控制电机的速度和可变转矩。
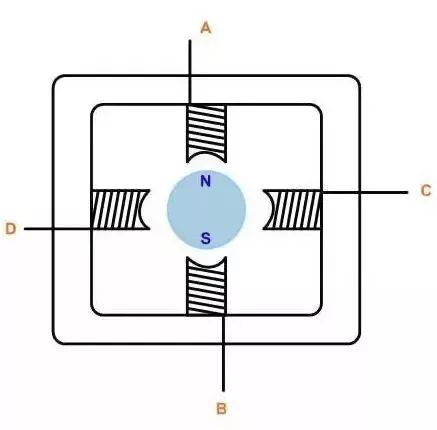
功率晶体管的换向实现了定子中的适当绕组,可根据转子位置生成最佳的转矩。在一个BLDC电机中,MCU必须知道转子的位置并能够在恰当的时间进行整流换向。
审核编辑:何安
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机
+关注
关注
142文章
9000浏览量
145336
发布评论请先 登录
相关推荐
FOC电机与BLDC电机的比较
FOC电机与BLDC电机在电动车及其他应用领域中都扮演着重要角色,但它们在控制方式和性能特点上存在一些差异。以下是对FOC电机与
BLDC方波控制与PMSM正弦波控制的区别
现代电机与控制技术以电流驱动模式的不同将永磁无刷直流电动机分为两大类:无刷直流电机(BLDC)与永磁同步电机(PMSM);两者在

使用MSPM0 MCU设计基于梯形的BLDC电机控制器
德赢Vwin官网
网站提供《使用MSPM0 MCU设计基于梯形的BLDC电机控制器.pdf》资料免费下载
发表于 09-02 10:20
•0次下载

BLDC电机控制算法详解
无刷直流电机(Brushless DC Motor,简称BLDC电机)以其高效率、高可靠性和低噪音等特点,在工业、家电和汽车等领域得到了广泛应用。为了实现BLDC
BLDC电机与变频器的区别
在电机技术不断发展的今天,BLDC电机(Brushless Direct Current Motor,无刷直流电机)以其高效、低噪音、长寿命等特点,在多个领域得到了广泛应用。而变频器作
BLDC电机的工作原理与结构
随着现代工业自动化程度的不断提高,电机作为重要的动力设备,其性能与效率的要求也日益增加。在众多种类的电机中,无刷直流电机(Brushless DC Motor,简称
bldc电机工作原理 bldc电机和普通电机区别
的工作原理,以及它与普通电机的区别。 一、BLDC电机的工作原理 结构组成 BLDC电机主要由定子、转子、位置传感器和电子
bldc变频电机是皮带吗 bldc电机是皮带还是直驱
BLDC(无刷直流)电机是一种电动机,它使用电子换向器来控制电动机的磁场,而不是传统的碳刷和换向器。这种设计使得BLDC电机具有更高的效率、





 工商网监
工商网监
评论