 如何快速有效地搭建安全AMR系统?
如何快速有效地搭建安全AMR系统?
上月底获得SGS颁发CE认证的仙工智能(SEER)无人搬运底盘AMB-300XS,其最大特点是安全。
下文将从如何选择安全AMR系统所需硬件元器件、如何搭建安全等级回路以及借助SYSTEMA分析工具验证系统整体安全分数等级来说明如何在已有的AMR系统上搭建符合安全规范的AMR硬件系统。
本文以工程实际案例出发,以工程案例说明搭建安全AMR硬件平台的方法。设计中因参考的安全标准条目太多。这里列出方法所依据的参考标准如下:EN1525-1998、IEC 61508-1/2/3/4/5/6/7 -2010、IEC 62061-2015、ISO13849-1/2-2015、ISO 3691-4-2020。
在说AMR安全体系中的硬件选型之前,我们先说说为什么要关注AMR的安全性。
在美国,AMR安全标准是由ANSI B56.5 - 2012“无人驾驶、自动导向工业车辆安全标准和载人工业车辆自动化功能标准”确定,而欧洲AMR安全标准是EN1525: 1997“工业卡车的安全-无人驾驶卡车及其系统”,两者均订明与自动驾驶车辆的设计、操作及保养有关的安全规定。
所以,为了保证AMR系统的安全,AMR必须遵守一些安全规则或相关标准,这就意味着AMR必须配有安全传感器及相关装置,以避免和主动预防风险。
01 如何做硬件选型
我们通常说AMR比传统的手动车辆(如传统叉车)更安全,原因可能是AMR的主要优点之一是不会伤害人或损坏基础设施。
但从安全标准的角度出发,实现所需目标的第一考虑要素便是能够确保AMR在危险状态下可以稳定安全制动的安全控制系统,所以我们在选取AMR的电机和驱动器、车身导航激光、安全控制器以及AMR外部可以通过紧急制动的控制元器件做了特别考虑。
在选择系统硬件元件及搭建的安全回路也是参考IEC 61508安全标准自动引导车辆需要符合安全完整性等级SIL2(PL d)的要求来实行。而AMR安全传感器及部件有电机驱动器STO、安全编码器、紧急停止按钮、安全PLC、安全继电器。
02 具体硬件选型方案
SICK公司推出的安全激光扫描仪-nanoScan3Core/nanoScan3 Pro符合安全完整性等级SIL2要求。单激光扫描角度覆盖范围275°,一般采用对角双激光的安装方案可以达到360°扫描覆盖范围,该器件直接提供了PFHD危险失效率,该数据稍后在计算安全回路分数的时候需要用到。
电机驱动器选用MOONS’公司的M2DC系类直流伺服驱动器,工程人员可根据具体AMR负载要求选择电机驱动功率等级,获取STO安全失效率参数用于后续安全分数计算。
SICK推出的DFS60S系类增量式正余弦编码器满足安全完整性等级SIL2,编码器每圈输出1024周期数。
紧急停止开关的选择,由于机械开关并没有直接提供安全失效率计算,实际在安全回路中是采用B10D安全使用周期和nop器件平均使用次数来最终确定开关的安全失效率的,再就是根据IEC 61508安全规范,急停输入回路必须使用双回路设计,所以选型时要注意。
PLC优先还是选择SICK安全套件,在安全AMR应用场合SICK的应用场景覆盖和相应产品线都是比较优秀,该示例中选用1*CPU1+1*Ethernet+2*XTIO+1*MOC的配置,同样每个模块安全完整性等级都符合最低标准SIL2,而且PFHD可以直接获取。
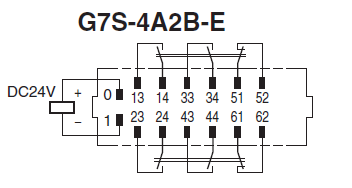
安全继电器用于控制抱闸电路的电源开关,和普通继电器相比,安全继电器的优点是具有触点强制导向功能,也就是说具有了触点失效的检测功能。
03 如何搭建安全等级回路
安全回路目前分为两部分:急停按钮检测回路和激光检测安全回路。
04 使用SYSTEMA安全回路搭建和评估
在这套安全系统里,每一个硬件配制环节都经过反复测试,从实用性、美观性、经济性等多方面综合考量,并且还配合使用SYSTEMA安全回路搭建和评估以检测AMR是否达到相应的安全标准,使AMR真正做到集功能、安全、实用于一体。
原文标题:【本润谐波 | 技术】如何快速有效地搭建安全AMR系统?
文章出处:【微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
- AMR
+关注
关注
3文章
406浏览量
30044 - 安全系统
+关注
关注
0文章
408浏览量
66814
原文标题:【本润谐波 | 技术】如何快速有效地搭建安全AMR系统?
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
接地电阻柜能有效地限制接地故障电流
AMR叉车在桶车转运领域的应用与前景分析

智慧园区:构建安全调度和预警管理系统

知语云全景监测技术:现代安全防护的全面解决方案
怎么搭建sdwan?如何搭建SD-WAN网络服务?
AMR(自主移动机器人)提升安全性:从预防到保护
如何快速搭建一个MQTT协议的测试环境






 工商网监
工商网监
评论