 基于光纤陀螺仪实现惯性测量系统的应用方案
基于光纤陀螺仪实现惯性测量系统的应用方案
1.引言
轨道不平顺检测方法有绝对测量与相对测量两大类,目前应用广泛的是相对测量法。相对测量又分弦测法、惯性基准法、惯性元件测量法等不同方法。其中弦测法、惯性基准法使用较多。由于惯性测量元件成本高昂、体积庞大等原因,惯性元件测量法一般只局限在大型轨检车上应用。
随着惯性元件成本的不断降低及其日渐小型化,该测量方法在小型轨检小车上的应用正逐步成为可能。其中,光纤陀螺仪作为一种高精度惯性测量元件,以前主要应用于军事、航空等重要领域,现已广泛应用于民用工业。
本文详细描述了一种由VG951、AD7714、P89V51RD等组成的轨检小车用轨道方向不平顺惯性测量系统及相关算法。该惯性测量系统也可用于轨道高低不平顺的测量。
2.系统要求与技术关键
惯性法测量轨向、高低不平顺时,实质上是按位置测量轨道水平方向的摆角或垂直方向的俯仰角。
采用陀螺仪检测轨向时,由于轨道在一定长度上的水平摆角不可能很大,轨检小车的推行速度又很低,陀螺仪所感受的角速度的值是很小的,其输出信号很微弱,很容易被噪声淹没。因此,本系统设计时,必须从噪声背景中提取出微弱的角速度信号,并通过积分方法实现角度信号的输出。
陀螺仪零位漂移是影响本系统性能的另一个关键性问题,也是陀螺仪选型时必须认真考虑的首要因素。
3.系统设计
VG951光纤陀螺仪是根据萨格纳克效应研制的,即光在萨格纳克效应中产生的光程差与旋转角速度成正比,从而可通过光的干涉结果推算角速度,其输出信号与角速度成正比。其主要关键技术指标为:偏差稳定性:0.3 - 1deg/hr;随机游走:<0.002deg/sqrtHz;工作范围:80deg/sec;
偏差重复性(offset) 1°/hr,1 sigma;偏差变化(恒稳态)0.3°/hr,1 sigma;比例因子37mV/°/s±10%;外部磁场<1°/hr/Gauss;输出阻抗1000Ω。由此可以看出,VG951是一种稳定性好、漂移小、重复性好、抗磁能力强的性能优异的光纤陀螺仪产品。
陀螺仪用于检测轨向时输出信号很微弱,因此,必须选用低噪声运放电路,并合理设置滤波电路。本系统选用高精度低噪声的仪用放大器AD620,其最佳源电阻在1000Ω左右,正好与VG951相匹配,能最大限度地减少由于电路阻抗不匹配产生的噪声 。该放大电路与无源 RC滤波电路组合,能够有效保证前置放大电路的品质。
AD 公司的A/D转换器AD7714是一款带信号处理功能的串行A/D,可直接从传感器接受低电平信号,使用和差转换技术实现高达24bit的无误码模数转换。AD7714内置数字滤波功能,可编程设置滤波器的截止频率和稳定时间。本系统可同时接受和处理二路VG951的输入。 AD7714参考端电压(+3.0V)由AD780提供。
陀螺仪信号是双极性信号,且信号地与电源地相通。虽然AD7714可以接受双极性输入,但有一个限制条件,即信号相对于AGND的电压不能低于-30mv。因此,必须将陀螺仪信号平移一个基准电压(+1.5V),该电压由AD780分压提供。
系统以Philips公司的P89V51RD2为控制与数据处理中心。P89V51RD2是一种高性能的80C51兼容型单片机,片内内置64K程序存储器,768+256Byte数据存储器,可利用 Philips提供的ISP/IAP程序实现系统的在线编程(在系统或在应用编程)。该CPU管理并控制着数据采集过程,由T2 定时器给AD7714的数字积分提供精确定时,并完成陀螺仪测量数据的实时分析与处理工作。图1为简化硬件原理图。
同时,P89V51RD2还是与轨检小车主CPU进行数据通讯的控制器,成为轨检小车多CPU主从结构的一个基础端点。
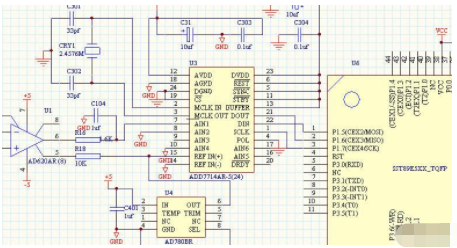
图1 简化硬件原理图
4.零点渐变算法
受陀螺仪零飘以及AD7714 AIN端信号偏置、基准电压和参考电压稳定性等因素的影响,AD7714输出信号的零点(陀螺仪角速度为零时输出信号)呈现出一定程度的波动。如果采用一次平均法计算零点,则随着时间变化实际零点漂移会很大,既实际零点与一次平均法所求的零点之差会变得很大,这样仅仅零点之差求和(既积分)就会产生不容忽视漂移。图2系列3曲线为一次平均法(求取零点)所产生的零点积分漂移曲线。
零点渐变算法的基本思路是:用多次平均法代替一次平均法求取零点。首先在陀螺仪静止不动(角速度为零)时,采集八个数据(实际零点)作为样本,这些样本叫做零点样本,求它们的均值,并称该值为基准零点,第一个基准零点叫初始基准零点,然后每采集八个零点样本求得一个新的基准零点。当陀螺仪运动(角速度不为零)时,零点样本由上次所求的基准零点代替,这样不管陀螺仪状态如何,每采集八个数据都可获得八个零点样本,既获得一个基准零点,由于实际零点与基准零点随时间几乎同时变化,所以它们之差不会随时间变化而变得很大,这样零点之差求和(既积分)产生的漂移将大大减少,零点漂移积分效果见图2系列3曲线。由上所述,求取零点样本为关键所在,下面是判断零点(陀螺仪角速度为零)依据。
由于陀螺仪VG951最小可分辨的角速度为0.002o/s,其比例因子为37mv/(o/s),换算成电压为37*0.002=74μV,用十六进制数据表示为74/(3*1000000)/*224=19D,AD采集的数据用3字节数据表示:XX XX XX,显然陀螺仪信号只能精确到16位。所以信号采集的精度在16位以上就可以。如果采集的信号与(初始)基准零点相减,其差值在100以下,可以认为这时陀螺仪角速度为零,信号可作为零点样本。若差值大于100则认为是非零信号(陀螺
仪角速度不为零),该点零点样本由上次所求的(初始)基准零点代替。
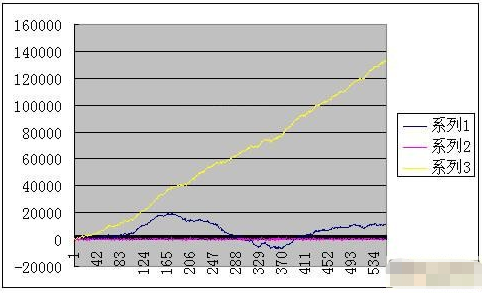
图2 陀螺仪静止不动时零点积分漂移曲线
5.实验效果
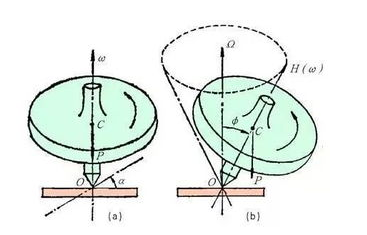
轨道方向(陀螺仪转过的角度)是通过实际采集的信号与上次所求的(初始)基准零点之差求和实现。实验输出曲线见图 3其中横坐标为秒,纵坐标为角度量(未标定位为实际角度),由图3可知在1小时内角度漂移没超过400000,化为实际角度为:400000/16/224*3/0.037=0.06o,漂移非常小。突变曲线是陀螺仪缓慢运动时输出的,反应非常灵敏。
图3 陀螺仪输出轨向图
6.结束语
本文作者创新点:该系统采用精密的光纤陀螺仪作为小型轨检车测量方向不平顺的传感器,这是一种新的尝试,并在实践中逐步形成了零点渐变算法,此算法是系统成败的关键。带有数字滤波功能的24位A/D AD7714的应用提高了抗干扰能力及测量精度,零点渐变算法、积分功能使得所求角度漂移小精度高,而P89V51RD2提供了更大的数据存储空间,其ISP/IAP功能利于对系统程序的修改或升级。
责任编辑:gt
-
光纤
+关注
关注
19文章
3913浏览量
73124 -
陀螺仪
+关注
关注
44文章
783浏览量
98660 -
测量系统
+关注
关注
2文章
537浏览量
41385
发布评论请先 登录
相关推荐
MEMS陀螺仪系统的精确导航
陀螺仪的特性图解及应用
3DM-GX3-25陀螺仪及惯性测量系统
3dm-gx5-25_微惯性航姿系统
基于ARM 的陀螺仪测控系统的设计与实现
基于ARM的陀螺仪测控系统的设计与实现

MEMS陀螺仪可否取代光纤陀螺仪技术






 工商网监
工商网监
评论