 GPS抗干扰技术的类型及应用研究
GPS抗干扰技术的类型及应用研究
1 引 言
作为一种通用的定位系统,GPS具有其他导航设备无可比拟的优越性,人们对其重视程度也日益提高。目前,GPS的相关研究主要涉及2个方面:一方面研究己方作战时能否有效利用GPS,另一方面研究如何破坏或干扰对方对GPS的正常使用。因此,研究GPS系统的抗干扰技术,有十分重要的意义。
目前,比较流行的GPS抗干扰技术主要有自适应调零(空域滤波)和空-时二维自适应滤波等方法;天线阵列主要有线阵和圆阵等阵型。
2算法原理
2.1 自适应调零算法
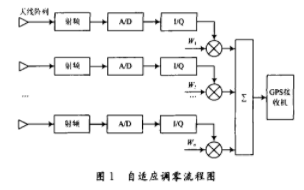
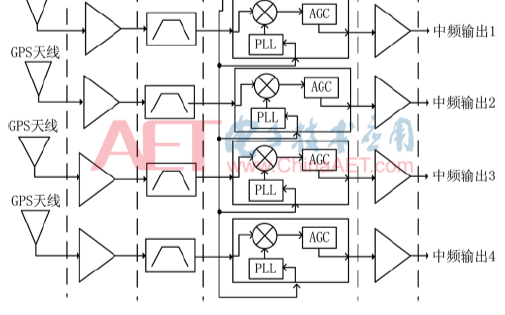
如图1所示,阵列的阵元数为M,信号分别经过射频前端、A/D、I&Q采样后进入系统,这M个数据分别与M个权值相乘,求和后送GPS接收机。这里需要有1路作为参考信号,根据天线阵型的不同,参考信号的选取也有不同。自适应调零算法是单纯的空域滤波算法:设天线阵元个数为M,用X=[X1,X2,…,XM]表示阵列输入信号向量,阵列选择加权向量W=[W1,W2,…,WM],使阵列输出信号Y=X*WH的功率最小。为了防止得到无意义解W1=W2…=WM=0,引入约束条件W1=C,C为任意不为0的常数,为方便起见,通常取C=1,则阵列的最优权值为:。其中,γ是任意不为零的常数;Rxx=E[XXH]为阵列输入信号的自相关矩阵((N-1)×(N-1)维);a0是约束向量,他使第1个阵元上的加权值固定为某个常数。
2.2 空-时二维自适应算法
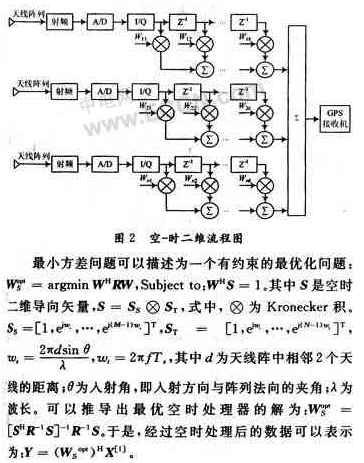
如图2所示:阵列的阵元数为M,信号分别经过射频前端、A/D、I&Q采样后进入系统,每个阵元含有N个时间延时单元。这M×N个数据分别与M×N个权值相乘,求和后送GPS接收机。这里求权值时,为了保证处理的效果,需要积累一定的数据量,所以数据采取分段输入的方式,权值分时段更新。由于需要2次矩阵求逆,运算量较大,因而权值更新较慢。该方法为空-时域的联合算法:阵列的阵元数为M,每个阵元含有N个时间延时单元。信号经过M个天线组成的天线阵进入系统,这里为了保证处理的效果需要积累一定的数据量,所以数据采取分段输入的方式,数据段的长度为L,即每次输入L次采样的数据处理。这样每次处理的数据量即为M×L维,数据经过延时处理后转换为MN×(L-N+1)维矩阵,用符号X表示。W表示处理器权向量(MN×1维),Rxx=E[XXH]表示接收数据的协方差矩阵(MN×MN维)。
3 接收机性能分析
3.1仿真测试条件
此测试采用的是线型天线阵,信号源位于天线法线方向,功率为-130 dBm;一个窄带干扰(线形调频干扰),功率为-75 dBm;环境噪声为-100 dBm,输入的信号-噪声干扰比(SJNRIN)为-55 dB,为典型的压制干扰。
在GPS接收机中,抗干扰模块要将干扰降低到与噪声接近的程度,即输出信号-噪声干扰比(SJNROUT)小于或接近-30 dB,接收机才能正常解扩信号。
为便于对比,本文取空-时二维算法的时间累积长度为L,标准延迟单元数目为N。(出于对研究成果的保密,这里不直接列出L与N的具体数值。)
3.2 自适应调零与空-时二维性能对比
实验条件都是干扰(线形调频干扰)与天线法线成24.4°夹角,方向图见图3和图4,结果对比见表1。
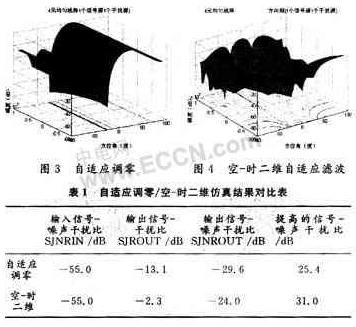
通过对比仿真结果可以发现,2种方法都可以有效提高信号-干扰比,零陷都对准了干扰方向,增益也都达到设计要求。自适应调零的方向图对干扰方向各个频点的抑制更均匀,但提高的信号-噪声干扰比较少;空-时二维的方向图对干扰方向不同频点的抑制不够均匀,但提高的信号-噪声干扰比较大。
3.3 线型天线阵与圆型天线阵性能对比
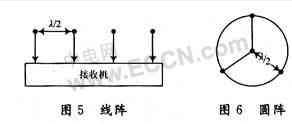
这里用的都是四阵元:线阵阵元间距为λ/2,线型排列,如图5所示;圆阵为圆心摆放一个阵元,其余阵元均匀分布于半径为λ/2的圆周上,如图6所示。线阵选取第一路为参考信号,圆阵选取圆心的一路为参考信号。
这里线阵和圆阵均采用自适应调零算法,干扰从不同的角度入射。其仿真结果对比如表2所示。
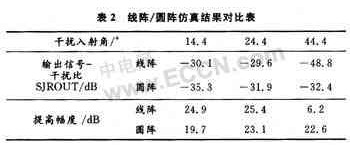
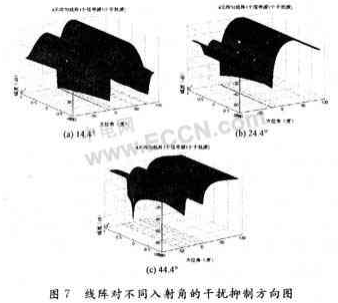
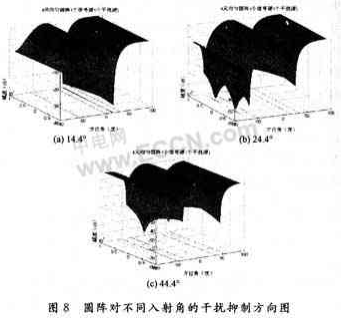
在各个入射角,线阵和线阵的方向图都较准确地对准了干扰方向。在干扰入射角较小时,线阵性能基本不变;入射角超过30°后,线阵的性能急剧下降。而圆阵对干扰入射角不敏感,不同的入射角性能变化不大,但在较小的入射角时性能不如线阵。如图7,图8所示。
4 结 语
由以上实验可以看出,在空域滤波算法(自适应调零)与空-时二维自适应滤波算法的比较中,自适应调零算法权值更新速度快,实时性好,在干扰的方向上产生了频带很宽,且比较均匀的“零陷”;空-时二维自适应滤波算法由于需要时间的累计,且算法较复杂,权值更新的速度较慢(设计要求更新周期不大于0.8 s。
本人做的仿真中可以达到大约6~8次/s,可以满足实时性要求),产生的“零陷”对准了干扰方向,但不很均匀;且由于算法比较复杂,实现的难度较大,成本较高。但效果好于空域滤波算法。因而,空域滤波算法使用于低成本,大量使用的抗干扰接收机,而空-时二维自适应滤波算法则适用于高精度的抗干扰接收机。另外,2种算法都涉及到矩阵的求逆过程,在实现过程中大多不直接求逆而采用逐级逼近的方法。
由于线阵的线形空间布局的固有缺陷,其只适合于对抗强度较大,且确知干扰方位的接收机。目前,绝大多数的GPS抗干扰接收机都使用圆阵(全向天线)阵型。
责任编辑:gt
- 射频
+关注
关注
102文章
5441浏览量
166750 - gps
+关注
关注
22文章
2831浏览量
165357 - 导航
+关注
关注
7文章
508浏览量
42086
发布评论请先登录
相关推荐
电缆的抗干扰技术
电缆的抗干扰技术
对微机系统软件抗干扰方法进行研究
全球定位系统的抗干扰技术研究

GPS单孔径双极化天线抗干扰算法研究

关于GPS天线阵抗干扰射频前端设计
美军装备首台抗干扰GPS接收机,关键在波束可控天线
基于微波暗室下的抗干扰接收机测试研究






 工商网监
工商网监
评论