 应用于无人操作系统中的IC电源解决方案
应用于无人操作系统中的IC电源解决方案
引言
现代无人操作军用系统已经成为全世界武装部队不可或缺的组成部分,国防行业不断对这类系统进行密集的开发,以使其能够发挥大范围攻击、监视和作战支持的作用。无人操作系统也许是如今的国防行业中最具活力的领域,全球年支出超过 55 亿美元,到 2024 年,预计这一数字将接近 100 亿美元[1]。
无人驾驶航空器 (Unmanned Aerial Vehicle, UAV) 领域令人吃惊的一面是,系统种类极其丰富,从有些重量不到 20 克的纤巧纳米无人驾驶航空器 (Nano UAV,NUAV) 到中型 UAV,例如质量为 450 千克、有效载荷能力为 150 千克的守望者 (Watchkeeper),直至起飞重量超过 5000 千克的 MQ-9 收割者 (MQ-9 Reaper) (以前名为捕食者 B (Predator B)),跨度之大、种类之多令人叹为观止。
UAV 无论大小,在平衡其性能和任务续航时间时,尺寸、重量和功率 (Size, Weight and Power,SWaP) 都是需要考虑的关键因素。有大量电子系统可以采用,但是在本文中,考虑电子系统时的关注点将落在以下几个方面:
· 空中运行安全性和自主运行
· 传感器和数据处理
· 电源系统
早期无人操作系统简介
现代 UAV 的起源可以追溯到 100 多年前,不过人们可能将 1930 年代用作空中目标打击练习的无线电控制无人驾驶飞机视作最知名的 UAV 鼻祖。英国制造了 400 多架这种飞机,当时以“蜂王”这个名字闻名于世,据说由于这种飞机而诞生了“无人驾驶飞机”这个术语。这种飞机要求,飞行时始终处于遥控飞机的飞行员的视线之内。不过没过多久,人们就开始尝试超出视距范围的自主飞行了。在 1940 年,爱德华·索伦森 (Edward M. Sorensen) 为他的地面站发明申请了专利,在这项发明中,使用频率调制技术控制飞机,并读回视距范围以外的飞行信息。之所以有了这项专利,是因为人们认识到,需要一种自动防止故障的模式,保持飞机平飞,并同时建立一个备份控制系统。
随着战时武器有效载荷的发展,以及后来在 1950 年代和 1960 年代侦查平台的发展,无人操作军用系统的复杂性也提高了。1960 年代早期的瑞恩 (Ryan) 无人驾驶飞机采用了基本的制导系统,该系统由可编程定时器、回转罗盘和高度表组成,决定着离港飞行高度层、航向和飞行时间,这种飞机还提供倒转和降落伞辅助着陆功能。尽管这些都是相当基本的功能,但是用胶片相机获得影像的战略意义以及半自主系统的优势是很容易看到的,因此人们想更加齐心协力地进行进一步的开发。
空中飞行安全性和自主运行
显然,飞行安全问题是至关重要的,人们已经就此问题展开了广泛的辩论,以确定怎样管制天空,才能使 UAV 的存在不会影响到现有空中交通的安全性,同时使军用和民用 UAV 的应用开发不受制约。
在视线范围内飞行的小型 UAV 依靠遥控飞机的飞行员来判断是否会发生碰撞,而自主或半自主运行的较大型 UAV 要想躲避空中碰撞,则需要复杂的检测和躲避系统。人们正在为此开发多种传感器,例如修改传统飞机应答器、可视和红外摄像机、激光探测与测距 (Light Detection and Ranging,LiDAR) 系统以及常规雷达系统。将来自这些传感器系统的数据转换成能够反映所处环境的图片,然后自主做出飞行决定,这需要非常复杂的软件和硬件资源,而且对于分享民用空域的 UAV 而言,还需要在满足现有协议要求的前提下运行。在友好空域中飞行时,使用地面雷达和交通绘图资源降低机载系统复杂性、扩大监测范围,也许是一种选择,不过采用这种方式时,在数据链路可靠性、延迟等其他问题上要做出折中。ASTREA 计划显示,可以采用自主检测和躲避技术,但是这种技术是在 Jetstream 飞机上采用的,这种飞机没有 UAV 的功耗、尺寸和重量限制。调整这种技术以使其能够用于大部分 UAV 是个很大的挑战,不过采用先进的现场可编程门阵列 (FPGA)、数字信号处理 (DSP) 和高性能模拟电子器件,可以使这种技术实现微型化。给这类电子系统供电也不是个简单任务,FPGA 需要严格的电源准确度以及低压和大电流,这就要求仔细设计电源链,以最大限度降低功耗、减少产生的热量。一种方法是使用数字电源系统管理 (PSM) 技术,这种技术通过动态调节电压和频率,可以降低功耗,从而有助于延长较小型 UAV 的任务续航时间。PSM 还提高了可靠性,并提供遥控和监视功能,以及能量使用记录和“黑匣子”故障记录功能。
传感器和数据处理
即使最小型的、手动启动的 NUAV 也可以携带多个摄像机和照相机完成监视任务,而多种版本的 MQ-9 收割者能够满足各种不同的猎杀及监视需求。携带武器的版本可能载有摄像机、红外夜视摄像机以及在有云或烟雾时使用的合成孔径雷达 (SAR),还有用于制导弹药的激光测距仪和目标照明系统。提供诱饵和干扰功能的版本也已开发出来,同时战术数据链路系统能够直接向有人驾驶飞机发送目标信息及影像数据。在信号情报 (SIGINT) 领域预计将进行更多开发工作,随着信号情报系统的进步,航程更长的版本将提供超过 40 小时的任务续航时间。由于机载传感器的迅速增加以及任务续航时间的延长而产生了大量数据,这些数据必须压缩和存储或通过实时数据链路发送,这势必导致某些方面的折中,例如带宽、质量和可能的影像数据损失。
每增加一种新的有效载荷能力,都会增大电源系统的负担。不过幸运的是,印刷电路板级电源解决方案的开发也取得了进步,最近几年功率密度得到了显著改进,凌力尔特公司的 µModule® (微型模块) 稳压器解决方案就是一种进步的技术。每个小型模块都含有一个完整的高效率电源,其外形尺寸适合对尺寸要求很严格的应用,而且可靠性非常高。
通信与信息安全
UAV 的通信链路可以分为两部分:
· 飞行控制数据链路 - 用于远程命令 (上行链路) 和遥测 (下行链路) 信息,以在 UAV 响应操作人员指令或按照 GPS 坐标自主飞行执行任务计划时,对 UAV 进行监控。一般情况下,采用扩展频谱技术的 56kbps 链路可以满足飞行控制数据链路的需求,上行链路可以用 128 位加密算法和前向纠错加以保护。
· 传送有效载荷传感器信息的通信链路 – 被看作是单独的通信链路,高清视频可能要求高达 10Mbps 的带宽,同时运行 COFDM、MPEG-4 或类似调制方案。诸如收割者等大型 UAV 一般会结合使用租用的专用卫星中继线路 (Ku 频段) 和地面 (C 频段) 通信线路,有充足的空间放置大型天线,而其他类型的无人机也许在工业、科研和医疗 (ISM) 频段运行,例如 2.4GHz (WLAN) 和 5.8GHz 频段。
与空中交通控制系统及协议的集成是实现 UAV 完全自主运行的另一个障碍,因为 UAV 需要响应语音命令,提供航向和飞行高度层信息,并通过 VHF 无线电频道及合成语音确认系统,确认已接受命令。
信息安全风险包括故意或偶然的干扰;假冒或拦截命令及控制信号;通信通道衰减。在常规的有人驾驶飞行中,为了避开任何非常靠近的空中飞行物,飞行员可以立即动手控制飞机,显然在使用 UAV 的情况下,飞行员始终要依靠通信链路以及机载传感器的稳定运行。
风险总是可以减轻的,即使是非常小和按照一套设定 GPS 坐标飞行的 UAV,也可以升高飞行高度,以恢复丢失的 GPS 信号,在达到离港续航时间限制时自动返回基站。作为应变措施,防欺诈 GPS 系统结合使用 GPS 接收器和惯性测量单元,对接收到的 GPS 信号进行统计分析也有助于确定是否有人尝试欺骗系统。
当然,所有这些通信系统都需要电源,而且敏感的无线电接收器需要一些噪声非常低的电源,这样无线电灵敏度才不会因电源而降低。新的芯片工艺技术和新颖的 IC 设计方法已经导致出现了一系列开创性产品,这些产品既能提供前所未有的高效率,噪声又非常低,例如 LT8640 Silent Switcher® 和 LT3042 超低噪声、超高 PSRR RF 线性稳压器。
电源系统
本文之前已经强调过,一些 IC 级电源技术进步支持了 UAV 及传感器有效载荷的持续变化,不过,机载动力源的选择也是影响总体性能的核心因素。随着人们日益专注于开发成本更低、尺寸更小、重量更轻的 UAV,内燃型动力源的吸引力下降了,燃料电池技术成为可能的选择,尤其是对续航时间长、平均功率需求低的任务而言。
美洲狮 (Puma) 系列小型 UAV 正在试验的一种燃料电池将飞行时间从 150 分钟 (使用 LiSO2 电池时) 延长到将近 5 小时,整个燃料电池系统重约 2 千克,功率与重量之比约为 1kW/千克。
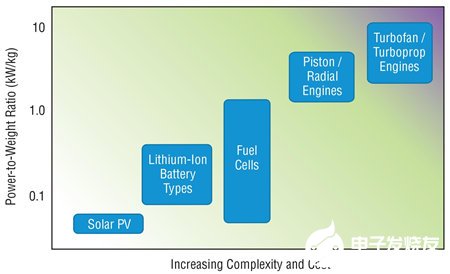
图 1:UAV 动力源的功率与重量之比
燃料电池的位置在电池和内燃机解决方案之间,具备环保优势,但确实面临一些燃料处理和存储问题,不过通过在可更换燃料盒中存储颗粒状氢,可以克服这类问题。
小型 UAV 和 NUAV 最有可能继续使用锂离子电池,视配置不同而不同,用单节电池就能使 NUAV 飞行大约 30 分钟。较长续航时间和较大型的型号将需要多节电池设计,这类设计可受益于用 LTC3300 等 IC 实现的电池容量平衡技术,这种技术可最大限度延长系统运行时间。飞行高度很高、充当伪卫星的 UAV,例如谷歌以及其他公司正在开发、将来拟用于提供互联网服务的 UAV,也可以用太阳能动力取代电池。这类系统需要在因辐射作用增强可能导致单粒子翻转的环境中保持可靠运行,因此复杂性会提高,而且也许需要专门规定所使用 IC 的特性,并对这些 IC 进行专门测试。
结论
现在,无人操作系统在武装部队中起着不可或缺的作用,军方提供的大量资金促进了这类系统的快速开发,开发焦点尤其集中在较小型、价格较低的 UAV 系统上。
随着传感器有效载荷和 UAV 平台电子系统变得越来越复杂,电源链和机载动力源的效率对于提供足够高的运行性能变得至关重要了,新型IC电源解决方案正在帮助实现 SWaP 目标。
飞行高度很高的 UAV 和续航时间非常长的任务正在推进对太阳能、燃料电池等新型电源的需求,而使用新型电源又意味着需要新型 IC。
责任编辑:gt
-
锂离子电池
+关注
关注
85文章
3238浏览量
77685 -
电源
+关注
关注
184文章
17704浏览量
249956 -
操作系统
+关注
关注
37文章
6801浏览量
123283
发布评论请先 登录
相关推荐
【直播邀请帖】无人系统技术电子解决方案的进步
无法在Windows 8.1操作系统中安装Xilinx ISE 9.2i
了解Android操作系统和Chrome操作系统
嵌入式操作系统IJLC/OS一Ⅱ在通信电源监控中应用
基于VxWorks操作系统的WiWindML 2D显示方案
基于VxWorks操作系统的WindML 2D显示方案
用于Android手机操作系统VideoEngine

完整的单IC电源管理电池维护/备份系统,适用于48V电源
面向功能安全应用的汽车开源操作系统解决方案





 工商网监
工商网监
评论