 如何将fal软件包重新定义为RT-Thread内部组件
如何将fal软件包重新定义为RT-Thread内部组件
在 V4.1.0 中,将 fal 软件包重新定义为 RT-Thread 内部组件。
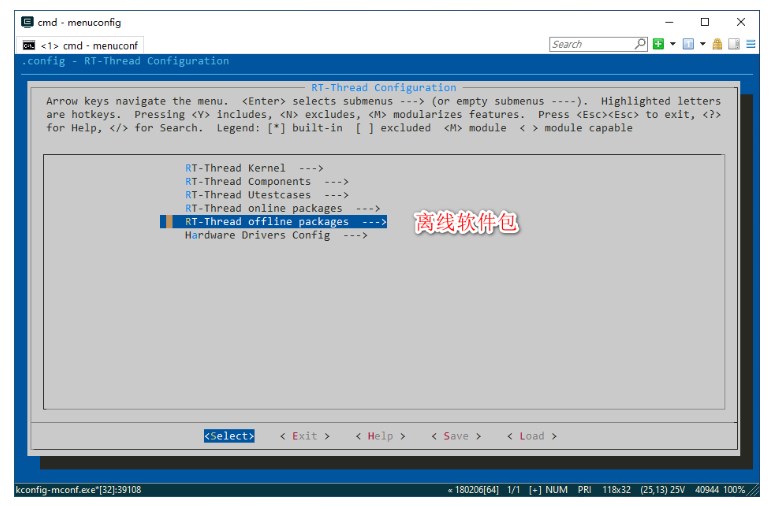
在使用方式上和以前有这些区别:原本使用 fal 需要在 RT-Thread 的包管理器中选择并进行下载;现在只需要在组件中打开使用即可。以下做详细介绍。
1、FAL介绍
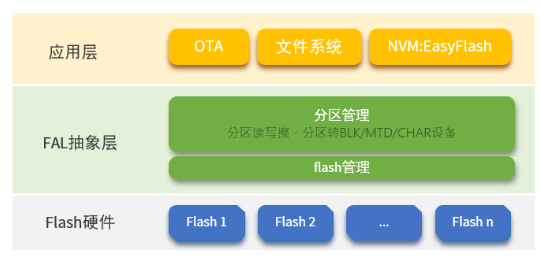
FAL (Flash Abstraction Layer) Flash 抽象层,是对 Flash 及基于 Flash 的分区进行管理、操作的抽象层,对上层统一了 Flash 及 分区操作的 API (框架图如下所示),并具有以下特性:
支持静态可配置的分区表,并可关联多个 Flash 设备;
分区表支持 自动装载 。避免在多固件项目,分区表被多次定义的问题;
代码精简,对操作系统 无依赖 ,可运行于裸机平台,比如对资源有一定要求的 Bootloader;
统一的操作接口。保证了文件系统、OTA、NVM(例如:EasyFlash) 等对 Flash 有一定依赖的组件,底层 Flash 驱动的可重用性;
自带基于 Finsh/MSH 的测试命令,可以通过 Shell 按字节寻址的方式操作(读写擦) Flash 或分区,方便开发者进行调试、测试;
1.1、打开 FAL
在组件中打开使用:
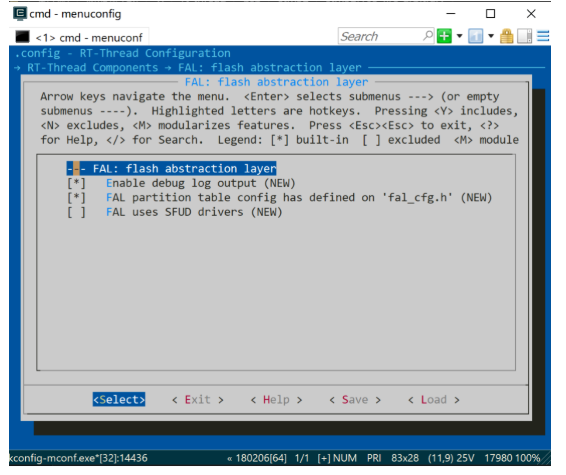
每个功能的配置说明如下:
开启调试日志输出(默认开启);
分区表是否在 fal_cfg.h 中定义(默认开启)。如果关闭此选项,fal 将会自动去指定 Flash 的指定位置去检索并装载分区表,具体配置详见下面两个选项;
存放分区表的 Flash 设备;
分区表的 结束地址 位于 Flash 设备上的偏移。fal 将从此地址开始往回进行检索分区表,直接读取到 Flash 顶部。如果不确定分区表具体位置,这里也可以配置为 Flash 的结束地址,fal 将会检索整个 Flash,检索时间可能会增加。
启用 FAL 针对 SFUD 的移植文件(默认关闭);
应输入调用 rt_sfud_flash_probe 函数时传入的 FLASH 设备名称(也可以通过 list_device 命令查看 Block Device 的名字获取)。该名称与分区表中的 Flash 名称对应,只有正确设置设备名字,才能完成对 FLASH 的读写操作。
1.2、FAL 目录

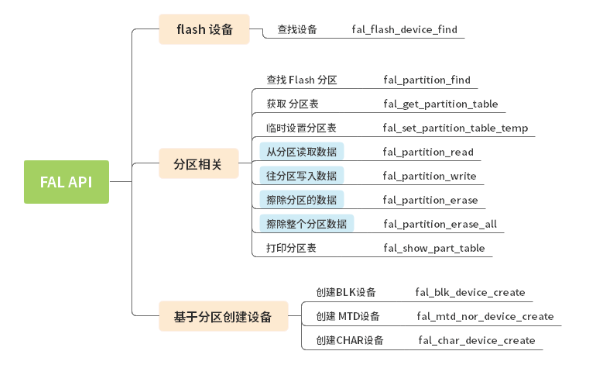
1.3、FAL API
FAL 相关的 API 如图所示,点击此处查看 API 参数详解。(以下链接请复制至外部浏览器打开)
https://github.com/RT-Thread/rt-thread/blob/master/components/fal/docs/fal_api.md
2、使用 FAL
使用 FAL 的基本步骤如下所示:
1、打开 FAL:从 Env 中打开 fal 组件。
2、FAL 移植:定义 flash 设备、定义 flash 设备表、定义 flash 分区表。以下主要对步骤 2 展开讲解。
3、调用 fal_init() 初始化该库:移植完成后,可在应用层调用,如在 main 函数中调用。
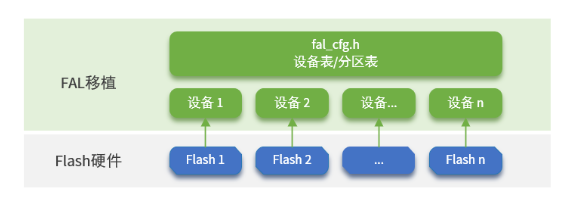
2.1、定义 flash 设备
在定义 Flash 设备表前,需要先定义 Flash 设备。可以是片内 flash, 也可以是片外基于 SFUD 的 spi flash:
定义片内 flash 设备可以参考 fal_flash_stm32f2_port.c
定义片外 spi flash 设备可以参考 fal_flash_sfud_port.c
定义具体的 Flash 设备对象,用户需要根据自己的 Flash 情况分别实现 init、 read、 write、 erase 这些操作函数:
static int init(void):可选 的初始化操作。
static int read(long offset, uint8_t *buf, size_t size):读取操作。

static int write(long offset, const uint8_t *buf, size_t size) :写入操作。

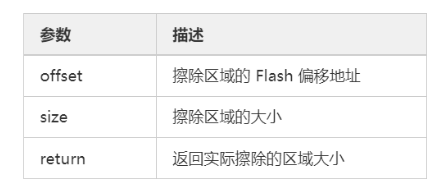
static int erase(long offset, size_t size) :擦除操作。
用户需要根据自己的 Flash 情况分别实现这些操作函数。在文件最底部定义了具体的 Flash 设备对象 ,如下示例定义了 stm32f2 片上 flash:stm32f2_onchip_flash
1const struct fal_flash_dev stm32f2_onchip_flash =2{3 .name = "stm32_onchip",4 .addr = 0x08000000,5 .len = 1024*1024,6 .blk_size = 128*1024,7 .ops = {init, read, write, erase},8 .write_gran = 89};
"stm32_onchip" : Flash 设备的名字。
0x08000000: 对 Flash 操作的起始地址。
1024*1024:Flash 的总大小(1MB)。
128*1024:Flash 块/扇区大小(因为 STM32F2 各块大小不均匀,所以擦除粒度为最大块的大小:128K)。
{init, read, write, erase} :Flash 的操作函数。如果没有 init 初始化过程,第一个操作函数位置可以置空。
8 : 设置写粒度,单位 bit, 0 表示未生效(默认值为 0 ),该成员是 fal 版本大于 0.4.0 的新增成员。各个 flash 写入粒度不尽相同,可通过该成员进行设置,以下列举几种常见 Flash 写粒度:
nor flash: 1 bit
stm32f2/f4: 8 bit
stm32f1: 32 bit
stm32l4: 64 bit
2.2、定义 flash 设备表
Flash 设备表定义在 fal_cfg.h 头文件中,定义分区表前需 新建 fal_cfg.h 文件 ,请将该文件统一放在对应 BSP 或工程目录的 port 文件夹下,并将该头文件路径加入到工程。fal_cfg.h 可以参考 示例文件 fal/samples/porting/fal_cfg.h 完成。
设备表示例:
1/* ===================== Flash device Configuration ========================= */ 2extern const struct fal_flash_dev stm32f2_onchip_flash; 3extern struct fal_flash_dev nor_flash0; 4 5/* flash device table */ 6#define FAL_FLASH_DEV_TABLE \ 7{ \ 8 &stm32f2_onchip_flash, \ 9 &nor_flash0, \10}
Flash 设备表中,有两个 Flash 对象,一个为 STM32F2 的片内 Flash ,一个为片外的 Nor Flash。
2.3、定义 flash 分区表
分区表也定义在 fal_cfg.h 头文件中。Flash 分区基于 Flash 设备,每个 Flash 设备又可以有 N 个分区,这些分区的集合就是分区表。在配置分区表前,务必保证已定义好 Flash 设备 及 设备表。fal_cfg.h 可以参考 示例文件 fal/samples/porting/fal_cfg.h 完成。
分区表示例:
1#define NOR_FLASH_DEV_NAME "norflash0" 2/* ====================== Partition Configuration ========================== */ 3#ifdef FAL_PART_HAS_TABLE_CFG 4/* partition table */ 5#define FAL_PART_TABLE \ 6{ \ 7 {FAL_PART_MAGIC_WORD, "bl", "stm32_onchip", 0, 64*1024, 0}, \ 8 {FAL_PART_MAGIC_WORD, "app", "stm32_onchip", 64*1024, 704*1024, 0}, \ 9 {FAL_PART_MAGIC_WORD, "easyflash", NOR_FLASH_DEV_NAME, 0, 1024*1024, 0}, \10 {FAL_PART_MAGIC_WORD, "download", NOR_FLASH_DEV_NAME, 1024*1024, 1024*1024, 0}, \11}12#endif /* FAL_PART_HAS_TABLE_CFG */
上面这个分区表详细描述信息如下:

用户需要修改的分区参数包括:分区名称、关联的 Flash 设备名、偏移地址(相对 Flash 设备内部)、大小,需要注意以下几点:
分区名保证 不能重复;
关联的 Flash 设备 务必已经在 Flash 设备表中定义好 ,并且 名称一致 ,否则会出现无法找到 Flash 设备的错误;
分区的起始地址和大小 不能超过 Flash 设备的地址范围 ,否则会导致包初始化错误;
注意:每个分区定义时,除了填写上面介绍的参数属性外,需在前面增加
FAL_PART_MAGIC_WORD属性,末尾增加0(目前用于保留功能)
3、Finsh/MSH 测试命令
fal 提供了丰富的测试命令,项目只要在 RT-Thread 上开启 Finsh/MSH 功能即可。在做一些基于 Flash 的应用开发、调试时,这些命令会非常实用。它可以准确的写入或者读取指定位置的原始 Flash 数据,快速的验证 Flash 驱动的完整性,甚至可以对 Flash 进行性能测试。
具体功能如下:输入 fal 可以看到完整的命令列表
1msh />fal2Usage:3fal probe [dev_name|part_name] - probe flash device or partition by given name4fal read addr size - read 'size' bytes starting at 'addr'5fal write addr data1 ... dataN - write some bytes 'data' starting at 'addr'6fal erase addr size - erase 'size' bytes starting at 'addr'7fal bench - benchmark test with per block size89msh />
3.1、指定待操作的 Flash 设备或 Flash 分区
当第一次使用 fal 命令时,直接输入 fal probe 将会显示分区表信息。可以指定待操作的对象为分区表里的某个分区,或者某个 Flash 设备。
分区或者 Flash 被成功选中后,还将会显示它的一些属性情况。大致效果如下:
1msh />fal probe 2No flash device or partition was probed. 3Usage: fal probe [dev_name|part_name] - probe flash device or partition by given name. 4[I/FAL] ==================== FAL partition table ==================== 5[I/FAL] | name | flash_dev | offset | length | 6[I/FAL] ------------------------------------------------------------- 7[I/FAL] | bl | stm32_onchip | 0x00000000 | 0x00010000 | 8[I/FAL] | app | stm32_onchip | 0x00010000 | 0x000b0000 | 9[I/FAL] | ef | norflash0 | 0x00000000 | 0x00100000 |10[I/FAL] | download | norflash0 | 0x00100000 | 0x00100000 |11[I/FAL] =============================================================12msh />13msh />fal probe download14Probed a flash partition | download | flash_dev: norflash0 | offset: 1048576 | len: 1048576 |.15msh />16
3.2、擦除数据
先输入 fal erase ,后面跟着待擦除数据的起始地址以及长度。以下命令为:从 0 地址(相对 Flash 或分区)开始擦除 4096 字节数据
注意:根据 Flash 特性,擦除动作将按扇区对齐进行处理。所以,如果擦除操作地址或长度未按照 Flash 的扇区对齐,将会擦除掉与其关联的整个扇区数据。
1msh />fal erase 0 40962Erase data success. Start from 0x00000000, size is 4096.3msh />
3.3、写入数据
先输入 fal write ,后面跟着 N 个待写入的数据,并以空格隔开。以下命令为:从地址 8 的位置依次开始写入 1、2、3、4 、 5 这 5 个字节数据
1msh />fal write 8 1 2 3 4 52Write data success. Start from 0x00000008, size is 5.3Write data: 1 2 3 4 5 .4msh />
3.4、读取数据
先输入 fal read ,后面跟着待读取数据的起始地址以及长度。以下命令为:从 0 地址开始读取 64 字节数据
1msh />fal read 0 642Read data success. Start from 0x00000000, size is 64. The data is:3Offset (h) 00 01 02 03 04 05 06 07 08 09 0A 0B 0C 0D 0E 0F4[00000000] FF FF FF FF FF FF FF FF 01 02 03 04 05 FF FF FF 5[00000010] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF 6[00000020] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF 7[00000030] FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF 89msh />
3.5、性能测试
性能测试将会测试 Flash 的擦除、写入及读取速度,同时将会测试写入及读取数据的准确性,保证整个 Flash 或整个分区的 写入与读取 数据的一致性。
先输入 fal bench ,后面跟着待测试 Flash 的扇区大小(请查看对应的 Flash 手册,SPI Nor Flash 一般为 4096)。由于性能测试将会让整个 Flash 或者整个分区的数据丢失,所以命令最后必须跟 yes 。
1msh />fal bench 4096 yes2Erasing 1048576 bytes data, waiting...3Erase benchmark success, total time: 2.674S.4Writing 1048576 bytes data, waiting...5Write benchmark success, total time: 7.107S.6Reading 1048576 bytes data, waiting...7Read benchmark success, total time: 2.716S.8msh />
4、常见应用
基于 FAL 分区的 fatfs 文件系统例程
https://github.com/RT-Thread/IoT_Board/tree/master/examples/15_component_fs_flash
基于 FAL 分区的 littlefs 文件系统应用笔记
https://www.rt-thread.org/document/site/application-note/components/dfs/an0027-littlefs/
基于 FAL 分区的 EasyFlash 移植说明
https://github.com/armink-rtt-pkgs/EasyFlash/tree/master/ports
-
数据
+关注
关注
8文章
7002浏览量
88937 -
软件
+关注
关注
69文章
4921浏览量
87386 -
RT-Thread
+关注
关注
31文章
1285浏览量
40075
发布评论请先 登录
相关推荐
介绍RT-Thread的软件包
使用menuconfig配置基于RT-Thread的NimBLE软件包
基于RT-Thread studio的flash常用软件包介绍
在rt-studio潘多拉开发板最新rt-thread不能运行的解决办法分享

RT-Thread社区上有哪些优秀的软件包?
2022 RT-Thread全球技术大会:RT-Thread软件包

RT-Thread在线软件包改为本地软件包的方法
RT-Thread使用cjson软件包发送64位长整型数据

RT-Thread中Agile Modbus软件包的使用方法
RT-Thread中mymqtt软件包的使用方法






 工商网监
工商网监
评论