 单片机的通信协议该如何设计
单片机的通信协议该如何设计
通信设计中考虑协议的灵活性,经常把协议设计成“不定长度”。
一个实例如下图:锐米LoRa终端的通信协议帧。
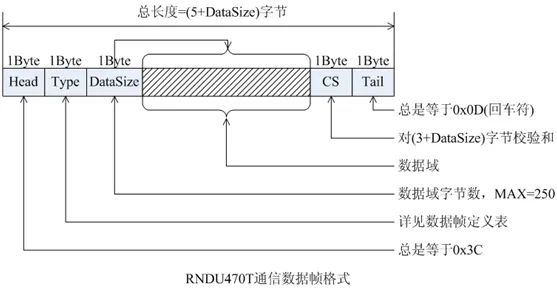
如果一个系统接收上述“不定长度”的协议帧,将会有一个挑战--如何高效接收与解析。
为简化系统设计,我们强烈建议您采用“状态机”来解析UART数据帧,并且把解析工作放在ISR(中断服务程序)完成,仅当接收到最后一个字节(0x0D)时,再将整个数据帧提交给进程处理。
该解析状态机的原理如下图所示:
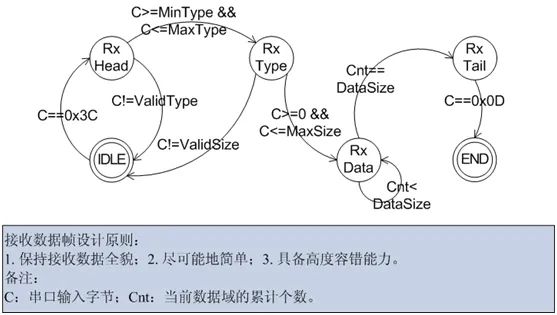
那么ISR处理这个状态机来得及吗?答案是:so easy!因为它只有3个动作,运算量十分小:
比较接收数据 -> 更新状态变量 -> 存储接收数据,C语言仅3条语句,翻译成机器指令也不超过10条。
代码清单如下:
/*** @brief Status of received communication frame*/typedef enum{STATUS_IDLE = (uint8_t)0,STATUS_HEAD, /* Rx Head=0x3C */STATUS_TYPE, /* Rx Type */STATUS_DATA, /* Data filed */STATUS_TAIL, /* Tail=0x0D */STATUS_END, /* End of this frame */} COMM_TRM_STATUS_TypeDef;/*** @brief Data object for received communication frame*/typedef struct{uint8_t byCnt; /* Count of 1 field */uint8_t byDataLen; /* Length of data field */uint8_t byFrameLen; /* Length of frame */COMM_TRM_STATUS_TypeDef eRxStatus;uint8_t a_byRxBuf[MAX_LEN_COMM_TRM_DATA];} COMM_TRM_DATA;/*** @brief Data object for received communication frame.* @note Prevent race condition that accessed by both ISR and process.*/static COMM_TRM_DATA s_stComm2TrmData;/*** @brief Put a data that received by UART into buffer.* @note Prevent race condition this called by ISR.* @param uint8_t byData: the data received by UART.* @retval None*/void comm2trm_RxUartData(uint8_t byData){/* Update status according to the received data */switch (s_stComm2TrmData.eRxStatus){case STATUS_IDLE:if (COMM_TRM_HEAD == byData) /* Is Head */{s_stComm2TrmData.eRxStatus = STATUS_HEAD;}else{goto rx_exception;}break;case STATUS_HEAD:if (TYPE_INVALID_MIN < byData && byData < TYPE_INVALID_MAX) /* Valid type */{s_stComm2TrmData.eRxStatus = STATUS_TYPE;}else{goto rx_exception;}break;case STATUS_TYPE:if (byData <= MAX_LEN_UART_FRAME_DATA) /* Valid data size */{s_stComm2TrmData.eRxStatus = STATUS_DATA;s_stComm2TrmData.byDataLen = byData;}else{goto rx_exception;}break;case STATUS_DATA:if (s_stComm2TrmData.byCnt < s_stComm2TrmData.byDataLen){++s_stComm2TrmData.byCnt;}else{s_stComm2TrmData.eRxStatus = STATUS_TAIL;}break;case STATUS_TAIL:if (COMM_TRM_TAIL == byData){/* We received a frame of data, now tell process to deal with it! */process_poll(&Comm2TrmProcess);}else{goto rx_exception;}break;default:ASSERT(!"Error: Bad status of comm2trm_RxUartData(). ");break;}/* Save the received data */s_stComm2TrmData.a_byRxBuf[s_stComm2TrmData.byFrameLen++] = byData;return;rx_exception:ClearCommFrame();return;}
原文:
https://blog.csdn.net/jiangjunjie_2005/article/details/50619884
审核编辑:符乾江
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6035文章
44554浏览量
634583 -
通信协议
+关注
关注
28文章
879浏览量
40294
发布评论请先 登录
相关推荐
AUTOSAR通信协议解析 如何实现AUTOSAR通信
通信协议栈是一个复杂的系统,它涵盖了多种通信方式和模块,以实现车内ECU之间的高效、可靠的数据交换。以下是对AUTOSAR通信协议的解析及实现AUTOSAR通信的方法: 一、AUTOS
串口通信协议解析 串口通信应用实例
串口通信协议解析 串口通信协议是指规定了数据包的内容,内容包含了起始位、主体数据、校验位及停止位,双方需要约定一致的数据包格式才能正常收发数据的有关规范。以下是串口通信协议的介绍: 基本概念
PLC控制系统的通信协议解析
在现代工业自动化中,PLC控制系统扮演着至关重要的角色。它们不仅需要处理复杂的逻辑控制任务,还需要与其他系统和设备进行通信。为了实现这一目标,PLC系统必须遵循一系列的通信协议。 PLC通信协议
PROFINET通信协议是什么
PROFINET通信协议是一种专为工业自动化领域设计的基于以太网的实时通信协议。以下是对PROFINET通信协议的详细解析,包括其定义、特点、体系结构、工作原理、通信方式、应用领域以及

简单认识UART通信协议
UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)通信协议是一种常见的串行通信协议,广泛应用于计算机、嵌入式系统、传感器、无线通信
说明白了,Modbus RTU通信协议解析-成都电路板单片机开发
Modbus协议在工业控制、电气、电子领域是个很常见的一种通信协议,很多遇见的传感器、控制器、变频器、驱动器之类的基本都支持该协议,常见到什么程度呢,就是你看到的一个设备如果支持串口
发表于 06-30 22:28
上位机与下位机通信协议的优化策略
在现代工业自动化系统中,上位机与下位机之间的通信是不可或缺的环节。上位机通常指负责监控、管理和控制功能的计算机或设备,而下位机则负责执行具体
can的通信协议主要由什么完成
CAN(Controller Area Network)是一种基于消息的通信协议,主要用于汽车和工业领域。它是一种局域网技术,允许多个设备在同一网络上进行通信。CAN协议的主要特点包括高可靠性、实时
RS485通信协议的特性和应用范围
随着工业自动化和物联网技术的飞速发展,数据通信协议的重要性日益凸显。RS485通信协议作为一种广泛应用于工业自动化领域的串行通信协议,其稳定性和可靠性得到了广泛的认可。本文将对RS485通信协
UART串口通信协议是什么?
UART (Universal Asynchronous Receiver/Transmitter) 是一种通信接口协议,用于实现串口通信。它是一种简单的、可靠的、广泛应用的串口通信协议
工业控制通信协议的报文帧分别是什么样的?
通信协议的设备上,有什么调试测试软件推荐,尽量不要借助硬件设备,直接使用上位机和支持该协议的设备相连接,直接发送帧读写参数?最常见的协议就是
发表于 01-19 14:46





 工商网监
工商网监
评论