 何为3D点云语义分割
何为3D点云语义分割
在自动驾驶环境感知系统中,如何获取高精度实时路况数据,是决定自动驾驶系统行车安全的关键。
目前主流的两种感知技术路径“纯视觉”与“高精地图+激光雷达”中,由于激光雷达采集的3D点云路况数据更为密集、准确且具备三维地理信息,因此以3D点云数据为基础的感知算法即成为部分自动驾驶企业的核心技术路径,并诞生了规模庞大的3D点云数据标注需求。
何为3D点云语义分割
对3D点云数据的标注处理,依据处理方式和使用标注工具的不同,大致可以分为三类:
▌纯点云
纯点云使用的标注工具以3D立体框为主,待标注对象以3D立体框形式标出,并附上相对应的属性信息标签,具体形式如下:
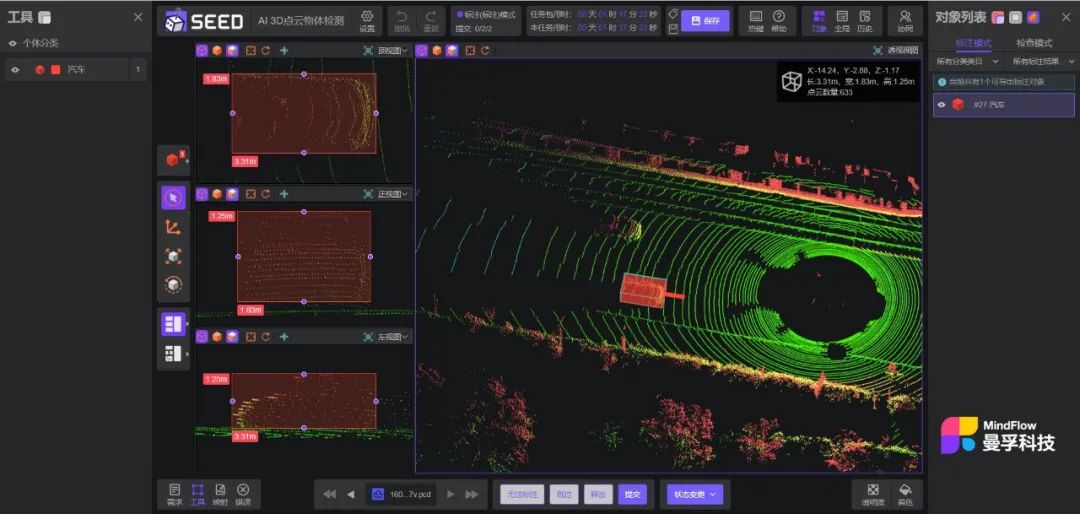
图片来源:曼孚科技SEED数据服务平台
▌融合标注
融合标注使用的3D标注工具仍以3D立体框为主,但在3D点云数据以外,还需要使用2D标注工具在点云数据相对应的2D图像中进行标注,3D点云数据中的标注对象与2D图像中的标注对象一一对应,具体形式如下:
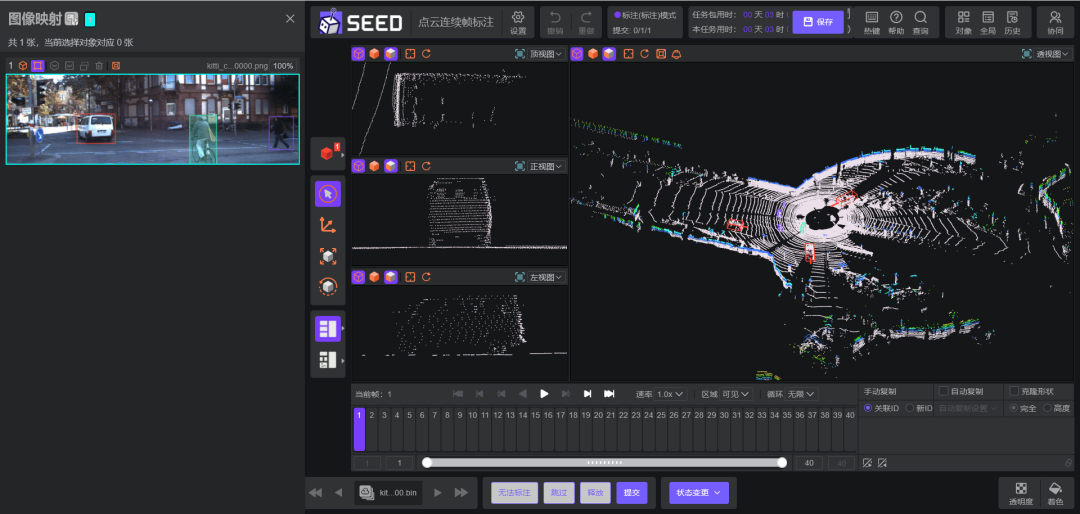
图片来源:曼孚科技SEED数据服务平台
▌3D点云语义分割
与2D图像语义分割标注逻辑类似,3D点云语义分割也是对不同的待标注对象进行上色分割、赋予语义标签,不同的是3D点云语义分割需要在3维立体点云中对每个像素点指定一个类别标签,比如车辆、行人、道路、建筑物等,具体形式如下:
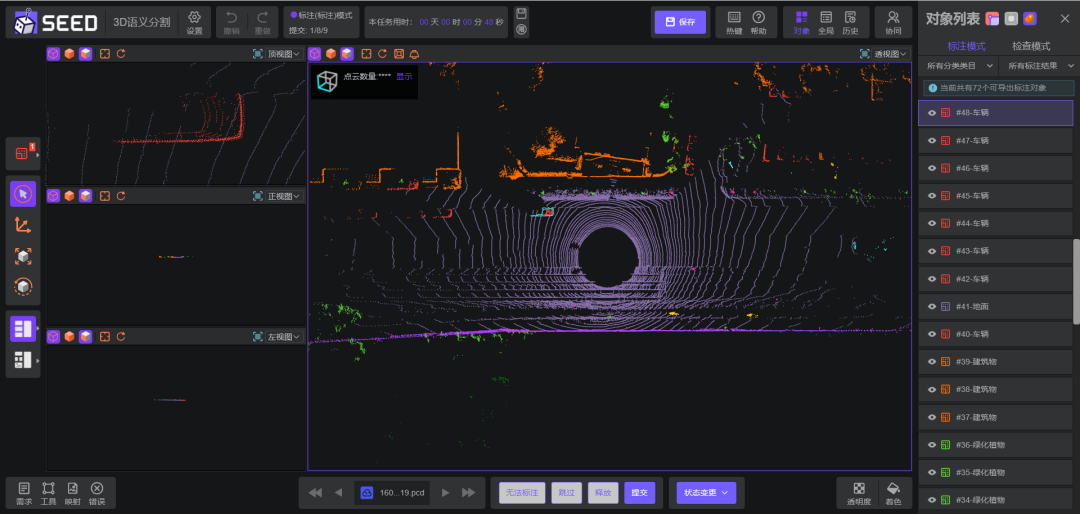
图片来源:曼孚科技SEED数据服务平台
相较于前两种标注方式,在需要更为精细的空间信息时(比如自动泊车),立体框标注场景中如铰接式公交车等形状可变的物体,3D点云语义分割标注对路况数据的反馈更为精准,因此3D点云语义分割标注在自动驾驶感知算法中所占的比重也愈发高涨。
常见标注规则与标注对象
不同算法、不同应用场景对点云语义分割的标注需求与规则也不尽相同,常见的相对简单的自动驾驶3D点云语义分割标注对象包括:
1、行人:通常指未骑乘交通工具的人,包含骑滑板车、平衡车的人。
2、骑车人:通常包括骑摩托车、自行车、三轮车、电动车等的人。
3、车辆:车辆是3D点云语义分割标注场景下最为常见,且子分类较多的对象。子对象的划分有依据车辆具体车型,比如轿车、卡车、公交车、救护车等,也有依据类别,比如客车、货车、工程车等。
以类别为例,具体如下:
1)微型车:如代步车、各类三轮车等;
2)小型汽车:如轿车、SUV等;
3)客车:如大、中型巴士、双层巴士等载人车辆;
4)货车:如厢式货车等载货车辆;
5)工程车:洒水车、消防车、垃圾车等;
6)其他车辆。
4、路面相关:与路面相关的各种对象,可具体细分为马路可行驶区域、人行道、车道线等。
5、建筑物:如楼房、隧道桥面、桥墩、高架桥等。
6、植物:如草地、树木等。
7、路面物体:路面物体也是一个子对象较多的种类,常见的包括:
1)护栏:如交通隔离栏、交通护栏等;
2)栅栏:临时性的如交通水马等;
3)交通标志:如红绿灯、标识牌、杆等;
4)障碍物:如交通锥桶、警示牌、防撞桶、石墩等;
5)其他物体。
8、噪声点云:如水雾、烟雾、汽车尾气、雨水等各类噪声点云。
以上是3D点云语义分割常见的各类标注对象,但不同场景,具体的对象划分规则以及待标注对象种类都存在巨大差异,并没有统一的标准。
而在更为具体的标注规则上,差异同样十分巨大。
常见的标注规则如物体起标范围,通常会规定点云数量超过X以上,该物体即需要标注,此外还会规定模糊无法判定物体的具体标注规则等等,不一而足。
具象化的标注实例如下:
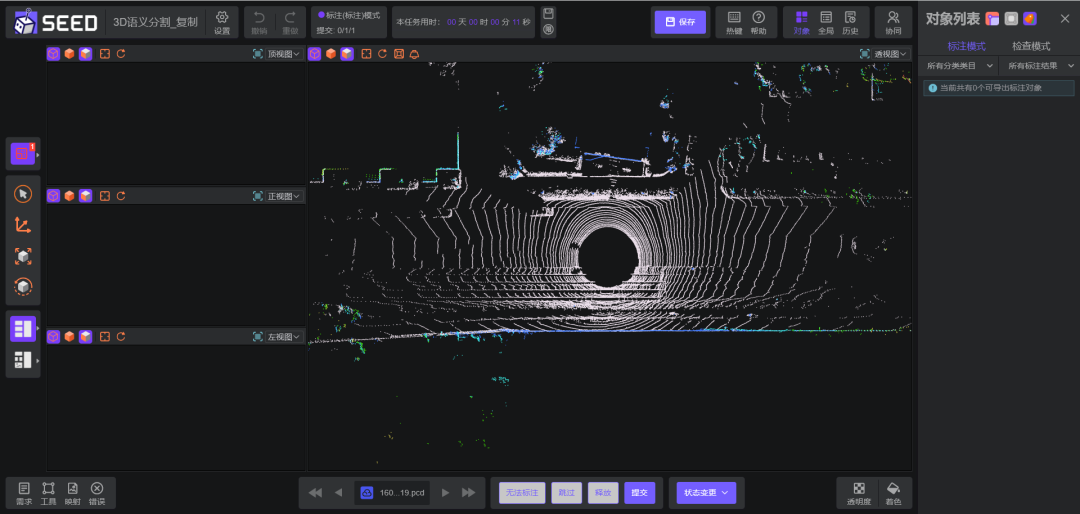
标注前(图片来源:曼孚科技SEED数据服务平台)
标注后(图片来源:曼孚科技SEED数据服务平台)
随着自动驾驶商业量产进入新阶段,开放路段场景复杂且多变,需要自动驾驶算法有更深的场景积累度与迭代能力,以满足感知算法与行车安全的需求。
3D点云语义分割更精细的场景信息反馈,在帮助算法建立更贴合现实的场景模型,以及提升感知安全方面具备天然优势,在自动驾驶迈向大规模商业化应用的今天,势必将扮演更重要的角色。
审核编辑 :李倩
-
3D
+关注
关注
9文章
2875浏览量
107474 -
激光雷达
+关注
关注
968文章
3967浏览量
189817 -
自动驾驶
+关注
关注
784文章
13784浏览量
166371
原文标题:案例分享:自动驾驶3D点云语义分割数据标注
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
图像语义分割的实用性是什么
图像分割和语义分割的区别与联系
裸眼3D笔记本电脑——先进的光场裸眼3D技术
图像分割与语义分割中的CNN模型综述
友思特案例 | 自研创新!三维工件尺寸测量及点云处理解决方案

机器人3D视觉引导系统框架介绍

新质生产力探索| AICG浪潮下的3D打印与3D扫描技术
基于深度学习的方法在处理3D点云进行缺陷分类应用

探索ICLR‘24 Spotlight中的首个十亿级别3D通用大模型

15倍加速!SuperCluster:最强3D点云全景分割!


让协作更便捷,图漾3D工业相机获UR+认证

两种应用于3D对象检测的点云深度学习方法







 工商网监
工商网监
评论