 室内定位中非视距的识别和抑制算法研究综述
室内定位中非视距的识别和抑制算法研究综述
全球定位系统(global positioning system, GPS), 凭借其广泛的应用范围和较高的定位精度, 受到了各方面专家和学者的青睐, 其在室外可以提供比较可靠的定位服务. 然而, 由于室内环境较为复杂, 信号的传播过程中会遇到障碍物(行人、墙壁、桌椅等)的阻塞, 使得信号发生反射、折射或散射, 导致强度减弱, GPS并不能实现精确的定位, 即在存在非视距(non-line-of-sight, NLOS)的室内环境中, 定位精度会有所下降. 如何有效识别和抑制NLOS, 从而提高定位精度是目前室内定位研究的热点问题之一. 室内定位作为定位技术在室内环境的延续, 应用更加广泛. 精确的节点位置信息可以应用在环境监测、军事侦察、定位打击目标、公共安全及应急响应等方面.
当发生地震、火灾等意外灾害时, 室内环境由于崩塌、火烧等会发生改变, 根据感觉盲目寻找很难快速找到被救援人员的位置. 而通过无人机等实地采集信息, 利用室内定位技术可以快速进行搜救, 既节省时间又能规划出安全的救援路径. 当发生恐怖袭击或者人质劫持等社会安全事件时, 利用室内定位技术可以快速确定袭击者或人质的位置. 反恐人员进入室内执行任务时, 通过室内协同定位算法进行配合, 可以精确地获得自己和同伴的位置, 对于任务的解决起到了更好的促进作用. 当处于火车站、高铁站、飞机场或地下停车场时, 室内定位技术可以为用户提供导航定位、停车、找车服务, 提高用户的满意度. 在商场或者仓库可以帮助用户快速找到心仪的商品, 增强用户体验感.
1 室内定位中的常用技术与算法
目前, 在室内定位方面所使用的技术有很多, 包括地磁技术[1]、Wi-Fi[2]、蓝牙[3]、超声波技术[4]、激光技术[5]、计算机视觉技术[6]、超宽带(ultra wide band, UWB)技术[7]等.
地磁技术主要依据地磁场强度实现定位, 成本较低, 而且对环境的要求不高. Wi-Fi技术不受灯光、湿度、温度等外界因素的影响, 在一定频段内可以很好地穿越障碍, 但在室内极易受到多径效应的影响, 定位精度中等[2]. 低功耗蓝牙具有功耗低、成本低、部署方便等优点, 误差可达到2 m左右[3]. 超声波技术由固定的参考基础设施和多种移动单元组成[4], 可以穿透部分固体和液体, 在黑暗、有毒等环境中仍可以应用, 但其频率受多普勒效应的影响且成本较高. 激光技术可根据信号和反射信号的时间差值计算距离, 结合角度信息完成相对定位, 成本较高.
计算机视觉技术主要分为利用地标包含的信息解算为矩阵实现定位和对数据库内存储的相机位置信息进行图像指纹匹配实现定位[6]两种. 伴随计算机视觉技术的发展和成熟, 使得基于视觉的用于同时定位与地图构建(simultaneous localization and mapping, SLAM)的技术可获得图形和视觉的支持. 视觉SLAM技术包括前端和后端两部分, 前端又称视觉里程计(visual odometry, VO), 主要进行特征检测和数据关联任务; 后端主要对前端的输出结果进行优化, 得到最优的位姿估计和地图[8].
由于较高的时空分辨率、良好的隐私保护、强穿透性以及高精度的定位性能, 使得UWB技术能为室内定位提供良好的解决方案. 同时也为许多应用程序提供了便利, 如医疗监控、安全和资产跟踪等[7].
室内定位中的常用算法包括航迹推算、指纹识别定位、邻近探测、极点定位、三角定位、多边定位和质心定位等.下面主要介绍这些算法定位的原理以及优缺点.
1
航迹推算
目标节点位置由所对应的步长、航向和上一步的位置不断累加推算得到[9], 其原理如图 1所示. 常应用于惯性导航定位[10], 可利用三轴加速度计、三轴陀螺仪和三轴磁力计的数据计算节点位置和轨迹.
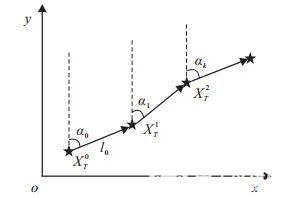
图 1 航迹推算定位原理图
已知目标节点初始位置为

初始航向角为

移动到下一时刻的位移为

下一时刻目标节点的位置为

后续各个时刻的位置为
优缺点: 此算法不需要借助外部设备即可实现定位, 采集的数据较为自主且无依赖; 但在推算的过程中会受到累加误差的影响, 故常用于短距离定位.
2
指纹识别定位
指纹识别定位算法[11-13]主要由离线阶段和在线阶段两部分构成.在离线阶段, 用小网格划分待定位区域, 得到交点并记录其坐标, 对在交点处接收到的无线电信号提取特征(常用接收信号强度(received signal strength, RSS)), 利用交点的坐标和相应的特征构成的信息链建成指纹数据库; 在线阶段, 通过匹配算法对比实际信息提取的特征与指纹数据库中的参数实现定位, 具体的流程如图 2所示.

图 2 指纹识别定位原理图
优缺点: 此算法自主性较高, 有较高的定位精度; 但在离线阶段建立指纹库工作量较大, 且一旦更换定位场地, 需要重新构建指纹库.
3
邻近探测
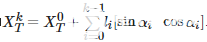
邻近探测法通过是否接收到物理信号来判断目标是否位于发射源四周[14], 主要取决于信号的传输范围. 由图 3可以看出, 目标节点位于基站B附近.
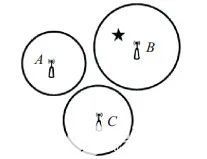
图 3 邻近探测原理图
优缺点: 此算法易于搭建, 易于实现且成本较低; 但定位精度不高, 仅可用于对精度要求不高的场景.
4
极点定位
极点定位根据测量的相对锚节点的距离和角度信息推测出目标的位置[14], 其原理如图 4所示. 若仅已知锚节点与目标节点之间的距离d1d1, 则可以初步确定目标节点是在以锚节点为圆心、d1d1为半径的圆上, 然后通过角度信息可以得到目标节点的精确位置.
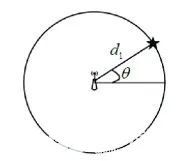
图 4 极点定位原理图
优缺点: 只需要根据一个锚节点的位置即可进行测量, 应用较为方便, 常用于大地测量; 但定位结果的准确性易受测距和测量角度仪器的精度的影响.
5
三角定位
三角定位法[15]是将两个锚节点的测量信息(包括距离和角度)相结合, 利用几何原理获取目标位置.
如图 5所示, 已知锚节点A与锚节点B之间的距离为

, 与目标节点位置的夹角分别为


. 利用三角几何原理可求得目标节点到锚节点A、B连线的垂直距离为
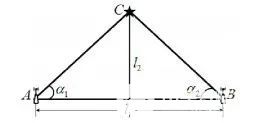
图 5 三角定位原理图
根据相对位置关系即可求得目标节点的位置.
优缺点: 此算法原理较为简单, 定位误差较小, 应用较为广泛; 但对于普通设备而言, 角度以及距离的信息很难精确获取.
-
指纹识别
+关注
关注
43文章
1742浏览量
102231 -
定位
+关注
关注
5文章
1329浏览量
35357 -
人工智能
+关注
关注
1791文章
47183浏览量
238245
发布评论请先 登录
相关推荐
如何应对UWB室内定位信号被遮挡

UWB标签在室内定位中的优势
无线室内定位系统是通过什么技术实现的呢?

如何利用LoRa实现室内定位?

室内定位技术在智慧医疗物联网的应用

基于java+单体服务 + 硬件(UWB定位基站、卡牌)技术架构开发的UWB室内定位系统源码

毫米波雷达模块驱动下的室内定位与导航系统性能评估
UWB技术应用:UWB模块在室内定位系统中的关键角色
室内定位蓝牙AoA/RSSI技术选择参考

基于室内定位技术的人员数字化管理







 工商网监
工商网监
评论