 cola_os的分析及使用
cola_os的分析及使用
正文
本期主角:cola_os
cola_os是一个300多行代码实现的多任务管理的OS,在很多MCU开发中,功能很简单,实时性要求不强,任务多了管理不当又很乱。
如果使用RTOS显得太浪费,这时候可以尝试使用使用cola_os这类基于软件定时器实现的时间片轮询框架。
仓库链接:
https://gitee.com/schuck/cola_os
license:MulanPSL-1.0(木兰宽松许可证, 第1版)。
cola_os是一份简洁明了的代码,包含很多有用的编程思想,值得通读。下面我们一起来学习一下:
cola_os的分析及使用
其实关于cola_os其实我们前几天的推文中也有做介绍。今天我们再一起来完整地梳理一遍。
cola_os目前的内容如:
1、cola_os
cola_os就是cola_os的任务管理模块。任务使用链表进行管理,其数据结构如:
typedefvoid(*cbFunc)(uint32_tevent);
typedefstructtask_s
{
uint8_ttimerNum;//定时编号
uint32_tperiod;//定时周期
booloneShot;//true只执行一次
boolstart;//开始启动
uint32_ttimerTick;//定时计数
boolrun;//任务运行标志
booltaskFlag;//任务标志是主任务还是定时任务
uint32_tevent;//驱动事件
cbFuncfunc;//回调函数
structtask_s*next;
}task_t;
每创建一个任务吗,就是往任务链表中插入一个任务节点。
其创建任务的方法有两种:
- 创建主循环任务
- 创建定时任务
两种方式创建,都是会在while(1)循环中调度执行任务函数。
我们可以看看cola_task_loop任务遍历函数,这个函数最终是要放在主函数while(1)中调用的。其内容如:
voidcola_task_loop(void)
{
uint32_tevents;
task_t*cur=task_list;
OS_CPU_SRcpu_sr;
while(cur!=NULL)
{
if(cur->run)
{
if(NULL!=cur->func)
{
events=cur->event;
if(events)
{
enter_critical();
cur->event=0;
exit_critical();
}
cur->func(events);
}
if(TASK_TIMER==cur->taskFlag)
{
enter_critical();
cur->run=false;
exit_critical();
}
if((cur->oneShot)&&(TASK_TIMER==cur->taskFlag))
{
cur->start=false;
}
}
cur=cur->next;
}
}
两种方式创建的任务都会在cur->func(events);被调用。不同的就是:遍历执行到定时任务时,需要清掉定时相关标志。
其中,events作为任务函数的参数传入。从cola_task_loop可以看到,事件并未使用到,events无论真还是假,在执行任务函数前,都被清零了。events的功能应该是作者预留的。
创建任务很简单,比如创建一个定时任务:
statictask_ttimer_500ms;
//每500ms执行一次
staticvoidtimer_500ms_cb(uint32_tevent)
{
printf("task0running...
");
}
cola_timer_create(&timer_500ms,timer_500ms_cb);
cola_timer_start(&timer_500ms,TIMER_ALWAYS,500);
cola_os是基于软件定时器来进行任务调度管理的,需要一个硬件定时器提供时基。比如使用系统滴答定时器,配置为1ms中断一次。
在1ms中断中不断轮询判断定时计数是否到达定时时间:
voidSysTick_Handler(void)
{
cola_timer_ticker();
}
voidcola_timer_ticker(void)
{
task_t*cur=task_list;
OS_CPU_SRcpu_sr;
while(cur!=NULL)
{
if((TASK_TIMER==cur->taskFlag)&&cur->start)
{
if(++cur->timerTick>=cur->period)
{
cur->timerTick=0;
if(cur->func!=NULL)
{
enter_critical();
cur->run=true;
exit_critical();
}
}
}
cur=cur->next;
}
}
如果到了则将标志cur->run置位,在while大循环中的cola_task_loop函数中如果检测到该标志就执行该任务函数。
2、cola_device
cola_device是硬件抽象层,使用链表来管理各个设备。其借鉴了RT-Thread及Linux相关驱动框架思想。大致内容如:
数据结构如:
typedefstructcola_devicecola_device_t;
structcola_device_ops
{
int(*init)(cola_device_t*dev);
int(*open)(cola_device_t*dev,intoflag);
int(*close)(cola_device_t*dev);
int(*read)(cola_device_t*dev,intpos,void*buffer,intsize);
int(*write)(cola_device_t*dev,intpos,constvoid*buffer,intsize);
int(*control)(cola_device_t*dev,intcmd,void*args);
};
structcola_device
{
constchar*name;
structcola_device_ops*dops;
structcola_device*next;
};
硬件抽象层的接口如:
/*
驱动注册
*/
intcola_device_register(cola_device_t*dev);
/*
驱动查找
*/
cola_device_t*cola_device_find(constchar*name);
/*
驱动读
*/
intcola_device_read(cola_device_t*dev,intpos,void*buffer,intsize);
/*
驱动写
*/
intcola_device_write(cola_device_t*dev,intpos,constvoid*buffer,intsize);
/*
驱动控制
*/
intcola_device_ctrl(cola_device_t*dev,intcmd,void*arg);
首先,在驱动层注册好设备,把操作设备的函数指针及设备名称插入到设备链表中:
staticcola_device_tled_dev;
staticvoidled_gpio_init(void)
{
GPIO_InitTypeDefGPIO_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOC,ENABLE);
GPIO_InitStructure.GPIO_Pin=PIN_GREENLED;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType=GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_NOPULL;
GPIO_Init(PORT_GREEN_LED,&GPIO_InitStructure);
LED_GREEN_OFF;
}
staticintled_ctrl(cola_device_t*dev,intcmd,void*args)
{
if(LED_TOGGLE==cmd)
{
LED_GREEN_TOGGLE;
}
else
{
}
return1;
}
staticstructcola_device_opsops=
{
.control=led_ctrl,
};
staticvoidled_register(void)
{
led_gpio_init();
led_dev.dops=&ops;
led_dev.name="led";
cola_device_register(&led_dev);
}
cola_device_register函数如:
intcola_device_register(cola_device_t*dev)
{
if((NULL==dev)||(cola_device_is_exists(dev)))
{
return0;
}
if((NULL==dev->name)||(NULL==dev->dops))
{
return0;
}
returndevice_list_inster(dev);
}
驱动注册好设备之后,应用层就可以根据设备名称来查找设备是否被注册,如果已经注册则可以调用设备操作接口操控设备。比如创建一个定时任务定时反转led:
voidapp_init(void)
{
app_led_dev=cola_device_find("led");
assert(app_led_dev);
cola_timer_create(&timer_500ms,timer_500ms_cb);
cola_timer_start(&timer_500ms,TIMER_ALWAYS,500);
}
staticvoidtimer_500ms_cb(uint32_tevent)
{
cola_device_ctrl(app_led_dev,LED_TOGGLE,0);
}
3、cola_init
cola_init是一个自动初始化模块,模仿Linux的initcall机制。RT-Thread也有实现这个功能:

一般的,我们的初始化在主函数中调用,如:
有了自动初始化模块,可以不在主函数中调用,例如:
voidSystemClock_Config(void)
{
}
pure_initcall(SystemClock_Config);
这样也可以调用SystemClock_Config。pure_initcall如:
#define__used__attribute__((__used__))
typedefvoid(*initcall_t)(void);
#define__define_initcall(fn,id)
staticconstinitcall_t__initcall_##fn##id__used
__attribute__((__section__("initcall"#id"init")))=fn;
#definepure_initcall(fn)__define_initcall(fn,0)//可用作系统时钟初始化
#definefs_initcall(fn)__define_initcall(fn,1)//tick和调试接口初始化
#definedevice_initcall(fn)__define_initcall(fn,2)//驱动初始化
#definelate_initcall(fn)__define_initcall(fn,3)//其他初始化
在cola_init中,首先是调用不同顺序级别的__define_initcall宏来把函数指针fn放入到自定义的指定的段中。各个需要自动初始化的函数放到指定的段中,形成一张初始化函数表。
__ attribute __ (( __ section __)) 关键字就是用来指定数据存放段。
do_init_call函数在我们程序起始时调用,比如在bsp_init中调用:
voidbsp_init(void)
{
do_init_call();
}
do_init_call里做的事情就是遍历初始化函数表里的函数:
voiddo_init_call(void)
{
externinitcall_tinitcall0init$$Base[];
externinitcall_tinitcall0init$$Limit[];
externinitcall_tinitcall1init$$Base[];
externinitcall_tinitcall1init$$Limit[];
externinitcall_tinitcall2init$$Base[];
externinitcall_tinitcall2init$$Limit[];
externinitcall_tinitcall3init$$Base[];
externinitcall_tinitcall3init$$Limit[];
initcall_t*fn;
for(fn=initcall0init$$Base;
fn< initcall0init$$Limit;
fn++)
{
if(fn)
(*fn)();
}
for(fn=initcall1init$$Base;
fn< initcall1init$$Limit;
fn++)
{
if(fn)
(*fn)();
}
for(fn=initcall2init$$Base;
fn< initcall2init$$Limit;
fn++)
{
if(fn)
(*fn)();
}
for(fn=initcall3init$$Base;
fn< initcall3init$$Limit;
fn++)
{
if(fn)
(*fn)();
}
}
这里有 initcall0init $$ Base 及 initcall0init Limit这几个initcall_t类型的函数指针数组的声明。它们事先是调用__define_initcall把函数指针fn放入到自定义的指定的段.initcall0init、.initcall1init、.initcall2init、.initcall3init。
initcall0init$$Base与initcall0init$$Limit按照我的理解就是各个初始化函数表的开始及结束地址。从而实现遍历:
for(fn=initcall0init$$Base;
fn< initcall0init$$Limit;
fn++)
{
if(fn)
(*fn)();
}
例如RT-Thread里的实现也是类似的:
volatileconstinit_fn_t*fn_ptr;
for(fn_ptr=&__rt_init_rti_board_start;fn_ptr< &__rt_init_rti_board_end; fn_ptr++)
{
(*fn_ptr)();
}
关于init自动初始化机制大致就分析这些。
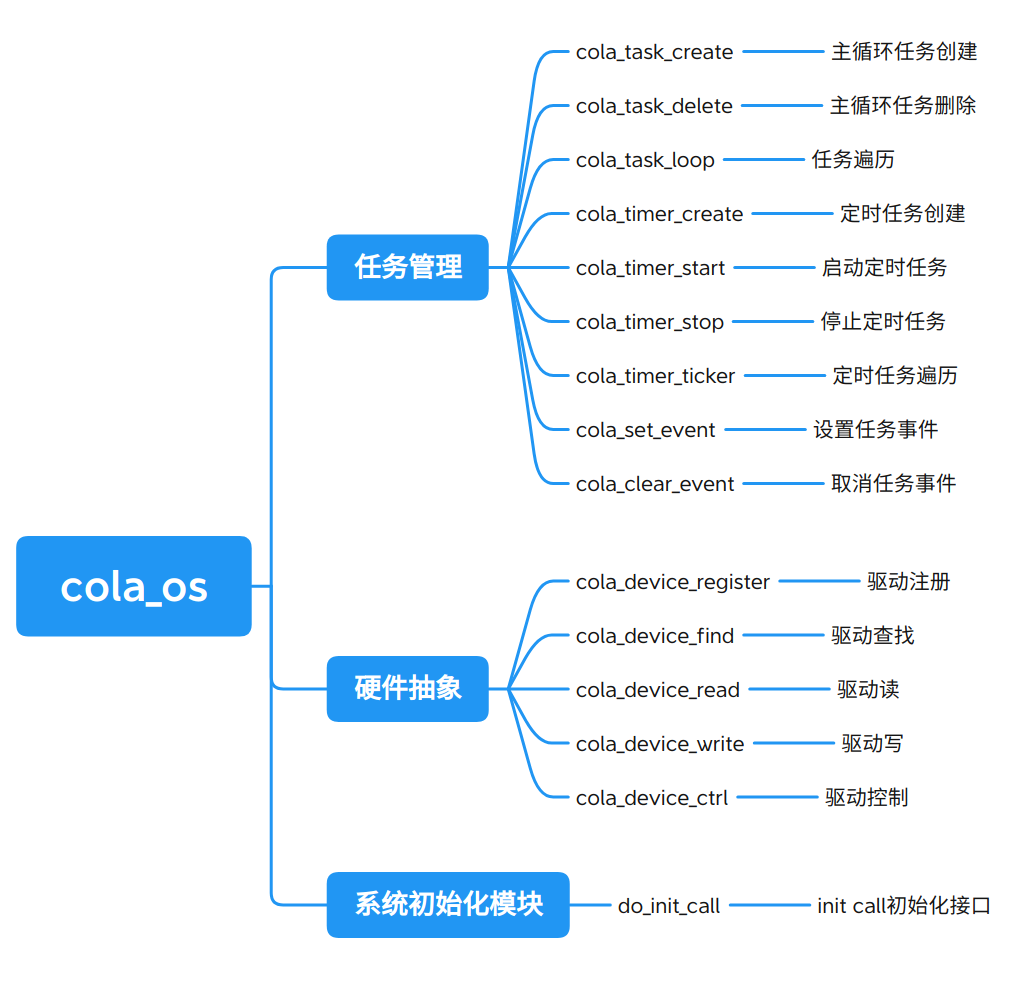
cola_os包含有cola_os任务管理、cola_device硬件抽象层及cola_init自动初始化三大块,这三块内容其实可以单独抽出来学习、使用。
4、cola_os的使用
我们创建两个定时任务:
- task0任务:定时500ms打印一次。
- task1任务:定时1000ms打印一次。
main.c:
/*Privatevariables---------------------------------------------------------*/
statictask_ttimer_500ms;
statictask_ttimer_1000ms;
/*USERCODEENDPV*/
/*Privatefunctionprototypes-----------------------------------------------*/
voidSystemClock_Config(void);
/*USERCODEBEGINPFP*/
/*Privatefunctionprototypes-----------------------------------------------*/
/*USERCODEENDPFP*/
/*USERCODEBEGIN0*/
//每500ms执行一次
staticvoidtimer_500ms_cb(uint32_tevent)
{
printf("task0running...
");
}
//每1000ms执行一次
staticvoidtimer_1000ms_cb(uint32_tevent)
{
printf("task1running...
");
}
intmain(void)
{
/*USERCODEBEGIN1*/
/*USERCODEEND1*/
/*MCUConfiguration----------------------------------------------------------*/
/*Resetofallperipherals,InitializestheFlashinterfaceandtheSystick.*/
HAL_Init();
/*USERCODEBEGINInit*/
/*USERCODEENDInit*/
/*Configurethesystemclock*/
//SystemClock_Config();
/*USERCODEBEGINSysInit*/
/*USERCODEENDSysInit*/
/*Initializeallconfiguredperipherals*/
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
/*USERCODEBEGIN2*/
printf("微信公众号:嵌入式大杂烩
");
printf("cola_ostest!
");
cola_timer_create(&timer_500ms,timer_500ms_cb);
cola_timer_start(&timer_500ms,TIMER_ALWAYS,500);
cola_timer_create(&timer_1000ms,timer_1000ms_cb);
cola_timer_start(&timer_1000ms,TIMER_ALWAYS,1000);
/*USERCODEEND2*/
/*Infiniteloop*/
/*USERCODEBEGINWHILE*/
while(1)
{
/*USERCODEENDWHILE*/
/*USERCODEBEGIN3*/
cola_task_loop();
}
/*USERCODEEND3*/
}
/**
*@briefSystemClockConfiguration
*@retvalNone
*/
voidSystemClock_Config(void)
{
RCC_OscInitTypeDefRCC_OscInitStruct;
RCC_ClkInitTypeDefRCC_ClkInitStruct;
RCC_PeriphCLKInitTypeDefPeriphClkInit;
/**InitializestheCPU,AHBandAPBbussesclocks
*/
RCC_OscInitStruct.OscillatorType=RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.MSIState=RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue=0;
RCC_OscInitStruct.MSIClockRange=RCC_MSIRANGE_6;
RCC_OscInitStruct.PLL.PLLState=RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource=RCC_PLLSOURCE_MSI;
RCC_OscInitStruct.PLL.PLLM=1;
RCC_OscInitStruct.PLL.PLLN=40;
RCC_OscInitStruct.PLL.PLLP=RCC_PLLP_DIV7;
RCC_OscInitStruct.PLL.PLLQ=RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR=RCC_PLLR_DIV2;
if(HAL_RCC_OscConfig(&RCC_OscInitStruct)!=HAL_OK)
{
_Error_Handler(__FILE__,__LINE__);
}
/**InitializestheCPU,AHBandAPBbussesclocks
*/
RCC_ClkInitStruct.ClockType=RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource=RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider=RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider=RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider=RCC_HCLK_DIV1;
if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct,FLASH_LATENCY_4)!=HAL_OK)
{
_Error_Handler(__FILE__,__LINE__);
}
PeriphClkInit.PeriphClockSelection=RCC_PERIPHCLK_USART1;
PeriphClkInit.Usart1ClockSelection=RCC_USART1CLKSOURCE_PCLK2;
if(HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit)!=HAL_OK)
{
_Error_Handler(__FILE__,__LINE__);
}
/**Configurethemaininternalregulatoroutputvoltage
*/
if(HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1)!=HAL_OK)
{
_Error_Handler(__FILE__,__LINE__);
}
/**ConfiguretheSystickinterrupttime
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**ConfiguretheSystick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/*SysTick_IRQninterruptconfiguration*/
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
}
pure_initcall(SystemClock_Config);
SysTick_Handler:
voidSysTick_Handler(void)
{
/*USERCODEBEGINSysTick_IRQn0*/
/*USERCODEENDSysTick_IRQn0*/
cola_timer_ticker();
HAL_IncTick();
HAL_SYSTICK_IRQHandler();
/*USERCODEBEGINSysTick_IRQn1*/
/*USERCODEENDSysTick_IRQn1*/
}
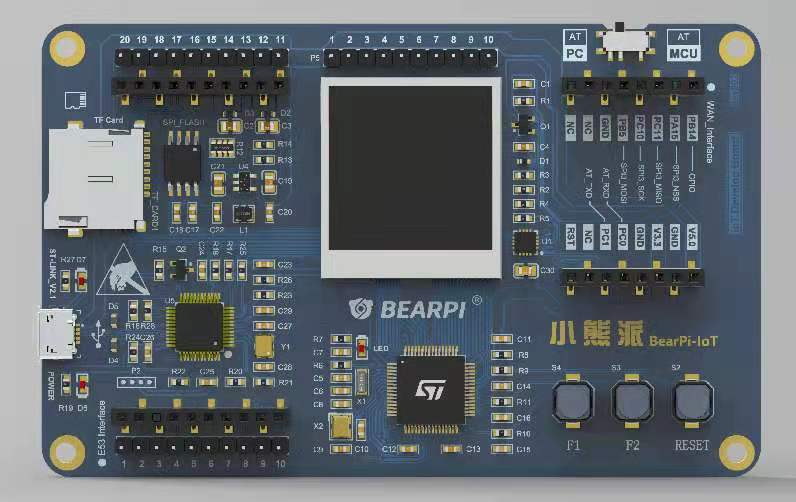
编译、下载、运行:
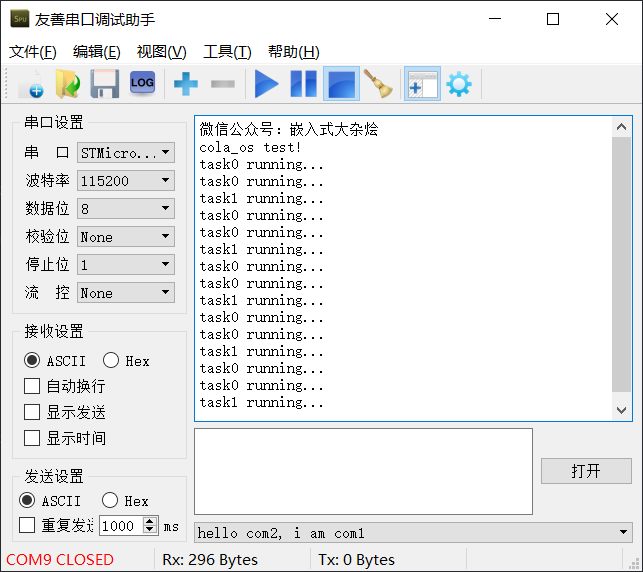
从运行结果可以看到,task1的定时周期是task0的两倍,符合预期。
审核编辑:汤梓红
-
mcu
+关注
关注
146文章
17123浏览量
350967 -
RTOS
+关注
关注
22文章
811浏览量
119586 -
代码
+关注
关注
30文章
4779浏览量
68516
原文标题:300多行代码实现的一个多任务OS
文章出处:【微信号:最后一个bug,微信公众号:最后一个bug】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
IOT OS比较,分析IOT OS的发展方向
使用cola_os软件定时器实现时间片轮询框架
OS/400 PASE 入门
【干货分享】μC/OS-II 软件定时器的分析与测试
常用的嵌入式操作系统是什么?Linux OS/palm OS与Windows CE对比分析哪个好?
cola os程序框架介绍
嵌入式系统OS应用层分析
μC/OS-II的多任务系统实时性分析与优先级分配
μC/OS-II实时性能测试与分析

μC/OS-II在EP7312上的移植
嵌入式开发|嵌入式软件框架《二》前后台任务框架-cola os系统

慢下来&快起来,看Coca-Cola高效转型路径
什么是cola_os?





 工商网监
工商网监
评论