 Linux驱动开发-编写按键驱动
Linux驱动开发-编写按键驱动
【摘要】 这篇文章介绍,如何使用杂项设备框架编写一个简单的按键驱动,完成编写、编译、安装、测试等流程,了解一个杂项字符设备驱动的开发流程。
1. 杂项设备注册函数
这篇文章介绍,如何使用杂项设备框架编写一个简单的按键驱动,完成编写、编译、安装、测试等流程,了解一个杂项字符设备驱动的开发流程。
下面是杂项字符设备的接口:
struct miscdevice {
int minor; /*次设备号 10 20 */
const char *name; /*设备节点的名称*/
const struct file_operations *fops; /*文件操作集合*/
struct list_head list; //链表
struct device *parent;
struct device *this_device;
const char *nodename;
umode_t mode;
};
//注册杂项字符设备
extern int misc_register(struct miscdevice * misc);
//注销杂项字符设备
extern int misc_deregister(struct miscdevice *misc);
按键需要将值传递给应用层,需要使用到copy_to_user函数,这个函数还有一个配对的copy_from_user,下面介绍这两个函数的详细功能和参数:
#include
unsigned long copy_to_user(void __user *to, const void *from, unsigned long n)
函数功能: 将驱动层数据拷贝到应用层。
函数参数:
void __user *to 用户空间的地址--到哪里去
const void *from 驱动层的地址--从哪里来
unsigned long n 拷贝的大小
返回值: 0表示成功。 >0表示未拷贝成功的数量。
unsigned long copy_from_user(void *to, const void __user *from, unsigned long n)
函数功能: 将应用层的数据拷贝到驱动层。
函数参数:
void *to 驱动空间的地址--拷贝到哪里去
const void __user *from 用户空间的地址--从哪里来
unsigned long n 拷贝的大小
返回值: 0表示成功。 >0表示未拷贝成功的数量。
2. 编写按键驱动
使用杂项设备注册按键驱动,应用层使用read接口读取按键值。
编写驱动之前需要先找到按键的原理图,找到按键接到CPU那个IO上的。
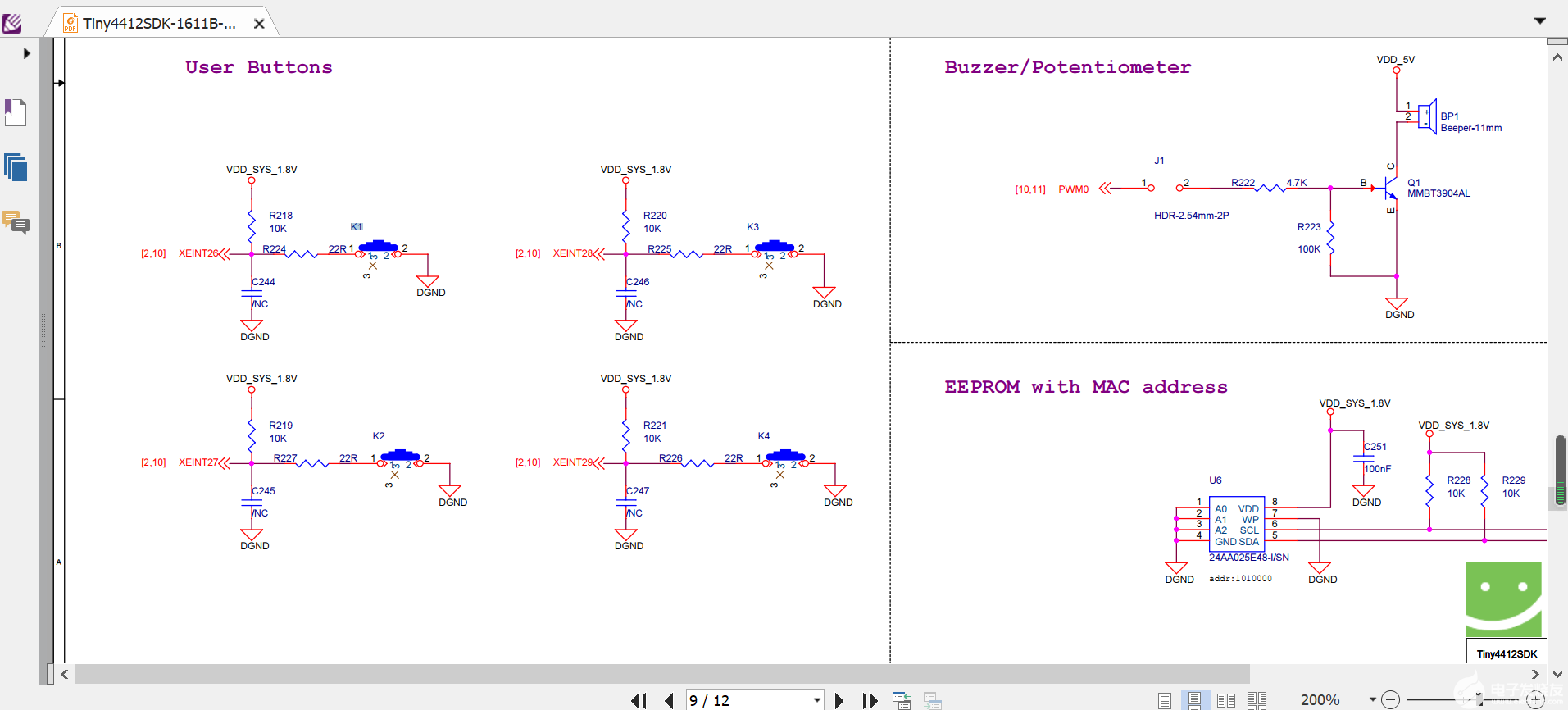
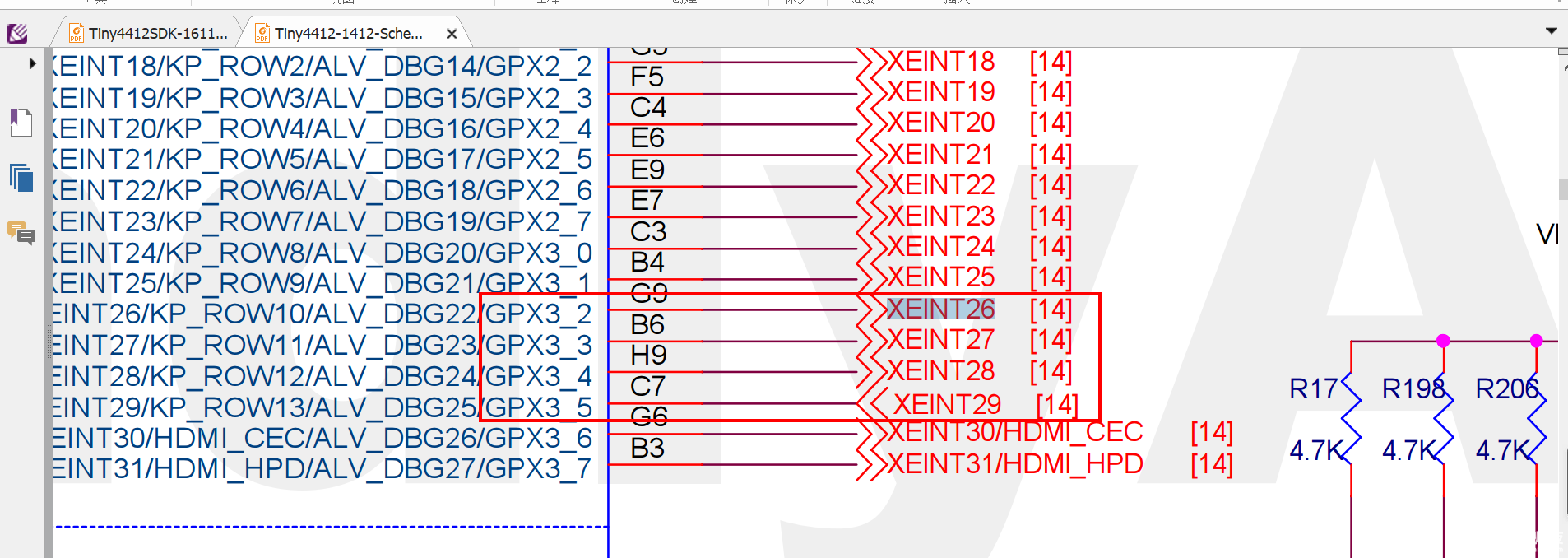
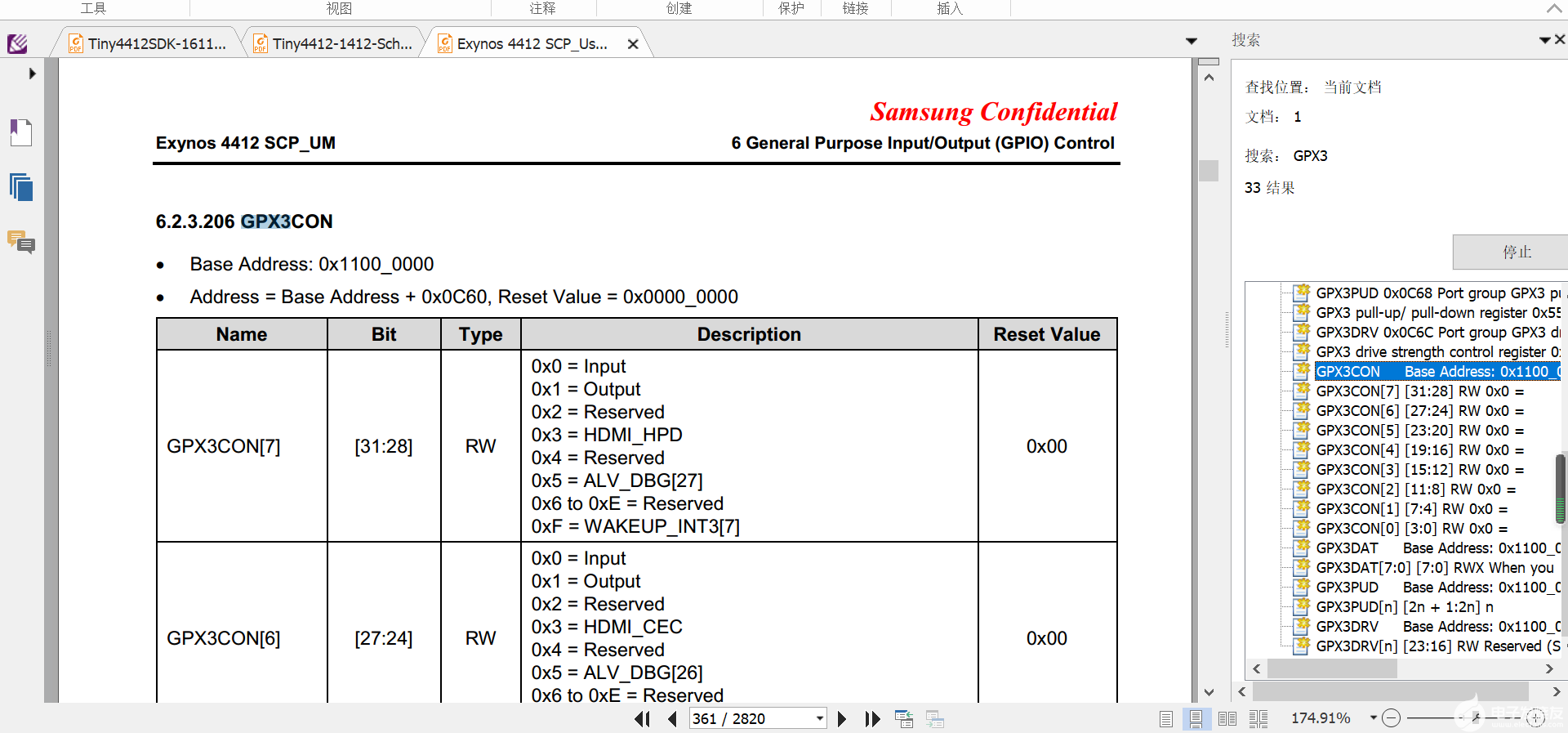
然后再查阅数据手册,找到这个GPIO口的寄存器地址,寄存器的配置页面,方便初始化配置GPIO口为输入模式。
2.1 按键驱动源代码
#include
#include
#include
#include
#include
#include
/* 按键的寄存器*/
static unsigned int *GPX3CON;
static unsigned int *GPX3DAT;
static int tiny4412_open(struct inode *inode, struct file *file)
{
printk("tiny4412_open-->ok\n");
return 0;
}
/*应用层的函数:
int key_val;
read(fd,&key_val,4)
ssize_t read(int fd, void *buf, size_t count);
*/
static ssize_t tiny4412_read(struct file *file, char __user *buf, size_t size, loff_t *seek)
{
int key_val=0;
if(!(*GPX3DAT&1<<2)) //判断按键是否按下
{
key_val=0x1;
}
else if(!(*GPX3DAT&1<<3)) //判断按键是否按下
{
key_val=0x2;
}
else if(!(*GPX3DAT&1<<4)) //判断按键是否按下
{
key_val=0x3;
}
else if(!(*GPX3DAT&1<<5)) //判断按键是否按下
{
key_val=0x4;
}
/*数据拷贝函数: 给应用层空间赋值--将驱动层的数据拷贝给应用层*/
/*copy_to_user(void __user *to, const void *from, unsigned long n)*/
int error;
error=copy_to_user(buf,&key_val,4);
if(error>0)
{
printk("数据拷贝失败.\n");
}
return 0;
}
static ssize_t tiny4412_write(struct file *file, const char __user *buf, size_t size, loff_t *seek)
{
return 0;
}
static int tiny4412_release(struct inode *inode, struct file *file)
{
printk("tiny4412_release-->ok\n");
return 0;
}
static struct file_operations fops=
{
.open=tiny4412_open,
.read=tiny4412_read,
.write=tiny4412_write,
.release=tiny4412_release
};
/*
Linux内核管理驱动---设备号
设备号是一个unsigned int 的变量--32位。
设备号=主设备号+次设备号
*/
static struct miscdevice misc=
{
.minor = MISC_DYNAMIC_MINOR, /*次设备号填255表示自动分配 主设备号固定为10*/
.name = "tiny4412_key", /*/dev目录下文件名称*/
.fops = &fops, /*文件操作接口*/
};
static int __init tiny4412_key_init(void)
{
/*转换物理地址*/
GPX3CON=ioremap(0x11000C60,4);
GPX3DAT=ioremap(0x11000C64,4);
/*配置GPIO口模式--配置按键*/
*GPX3CON&=0xFF0000FF;
/*1. 杂项设备的注册函数*/
misc_register(&misc);
printk("按键: 驱动安装成功\n");
return 0;
}
static void __exit tiny4412_key_exit(void)
{
/*2. 杂项设备的注销函数*/
misc_deregister(&misc);
/*取消转换*/
iounmap(GPX3CON);
iounmap(GPX3DAT);
printk("按键: 驱动卸载成功\n");
}
module_init(tiny4412_key_init); /*驱动入口--安装驱动的时候执行*/
module_exit(tiny4412_key_exit); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
2.2 makefile文件
编译驱动的makefile代码。
KER_DRI=/home/wbyq/work/linux-3.5/linux-3.5
all:
make -C $(KER_DRI) M=`pwd` modules
cp *.ko /home/wbyq/work/rootfs/code -f
make -C $(KER_DRI) M=`pwd` modules clean
arm-linux-gcc app.c -o app
cp app /home/wbyq/work/rootfs/code -f
rm app -f
obj-m += miscdev_key_drv.o
2.3 应用层驱动测试代码
编译完运行时,传入按键的设备节点文件.
#include
#include
#include
#include
int main(int argc,char **argv)
{
if(argc!=2)
{
printf("./app <设备节点文件>\n");
return 0;
}
/*1. 打开设备文件*/
int fd=open(argv[1],O_RDWR);
if(fd<0)
{
printf("%s 设备驱动打开失败.\n",argv[1]);
return 0;
}
/*2.读写数据*/
int key_val;
while(1)
{
read(fd,&key_val,4);//读取按键值
if(key_val)
{
printf("%#x\n",key_val);
}
}
/*3. 关闭文件*/
close(fd);
return 0;
}
2.4 驱动安装流程
[root@wbyq code]# ls
tiny4412_key_drv.ko
[root@wbyq code]#
[root@wbyq code]# insmod tiny4412_key_drv.ko
[ 173.340000] 驱动测试: 驱动安装成功
[root@wbyq code]# lsmod
hello_drv 616 0 - Live 0xbf000000 (O)
[root@wbyq code]# modinfo tiny4412_key_drv.ko
filename: tiny4412_key_drv.ko
license: GPL
depends:
vermagic: 3.5.0-FriendlyARM SMP preempt mod_unload ARMv7 p2v8
[root@wbyq code]# rmmod tiny4412_key_drv.ko
[ 391.075000] 驱动测试: 驱动卸载成功
[root@wbyq code]#
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动
+关注
关注
12文章
1838浏览量
85261 -
函数
+关注
关注
3文章
4327浏览量
62567 -
按键
+关注
关注
4文章
223浏览量
57595
发布评论请先 登录
相关推荐
linux内核中通用HID触摸驱动
在linux内核中,为HID触摸面板实现了一个通用的驱动程序,位于/drivers/hid/hid-multitouch.c文件中。hid触摸驱动是以struct hid_driver实现,首先定义一个描述hid触摸

LSP 2.10 DaVinci Linux驱动程序
德赢Vwin官网
网站提供《LSP 2.10 DaVinci Linux驱动程序.pdf》资料免费下载
发表于 10-09 09:30
•0次下载

linux系统的设备驱动一般分几类
Linux系统的设备驱动是操作系统与硬件设备之间的桥梁,负责实现操作系统与硬件设备之间的通信和控制。Linux系统的设备驱动可以分为以下几类: 字符设备
Linux设备驱动程序分类有哪些
Linux设备驱动程序是操作系统与硬件设备之间的桥梁,负责实现硬件设备与操作系统之间的通信和控制。Linux设备驱动程序的分类繁多,可以根据不同的标准进行分类。 按硬件类型分类
linux驱动程序如何加载进内核
在Linux系统中,驱动程序是内核与硬件设备之间的桥梁。它们允许内核与硬件设备进行通信,从而实现对硬件设备的控制和管理。 驱动程序的编写 驱动
linux驱动程序主要有哪些功能
Linux驱动程序是操作系统与硬件设备之间进行通信的桥梁,负责实现硬件设备与操作系统之间的数据交换和控制。Linux驱动程序的主要功能包括以下几个方面: 设备识别与初始化
linux驱动程序的编译方法是什么
Linux驱动程序的编译方法主要包括两种: 与内核一起编译 和 编译成独立的内核模块 。以下是对这两种方法的介绍: 一、与内核一起编译 与内核一起编译意味着将驱动程序的源代码直接集成到Linu
linux驱动程序的编译方法有哪两种
Collection)或其他C/C++编译器来编译源代码文件。这种方法较为原始,需要开发者手动指定编译器选项、包含路径、库文件等。然而,在Linux驱动开发中,由于
linux驱动程序运行在什么空间
Linux 驱动程序是操作系统的一部分,负责管理硬件设备与操作系统之间的交互。驱动程序运行在内核空间(Kernel Space),这是操作系统的核心部分,与用户空间(User Space)相对。内核


AOSP源码定制-内核驱动编写
有时候为了分析一些壳的检测,需要在内核层面对读写相关的操作进行监控,每次去修改对应的内核源码编译重刷过于耗时耗力,这里就来尝试编写一个内核驱动,载入后监控读写。

ArmSoM系列板卡 嵌入式Linux驱动开发实战指南 之 字符设备驱动
字符设备驱动 本章,我们将学习字符设备使用、字符设备驱动相关的概念,理解字符设备驱动程序的基本框架,并从源码上分析字符设备驱动实现和管理等。 主要分为下面五部分:





 工商网监
工商网监
评论