 基于STM32单片机的四旋翼无人机飞控设计
基于STM32单片机的四旋翼无人机飞控设计
四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器。进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。
四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。
四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优势所在,而且相较于固定翼飞机,四轴也有着可垂直起降,机动性好,易维护等优点。
一:方案& 电路
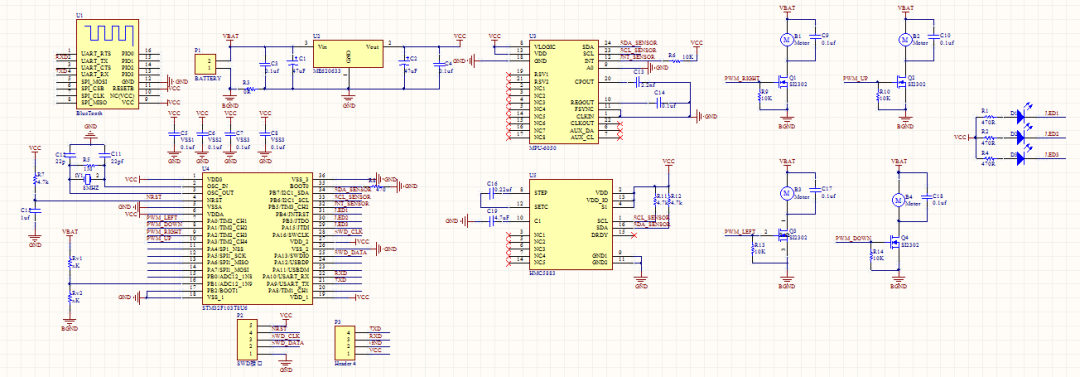
本设计采用STM32F1作为核心处理器,该处理器内核架构 ARM Cortex-M4,具有高性能、低成本、低功耗等特点。
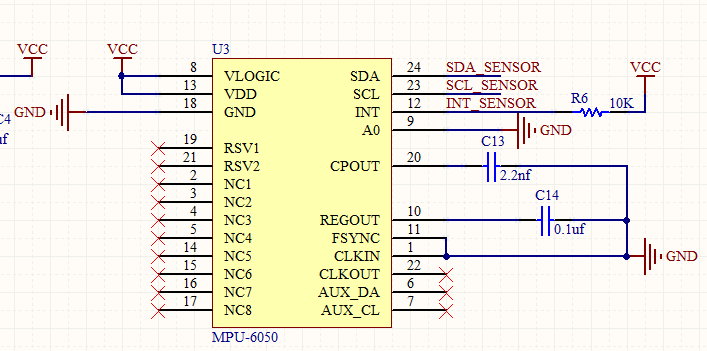
主控板包括传感器MPU6050电路模块、无线蓝牙模块、电机启动模块,电源管理模块等;遥控使用商品遥控及接收机。
控制芯片捕获接收机的PPM命令信号,传感器与控制芯片之间采用IIC总线连接,MCU与电调之间用PWM传递控制信号。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
STM32单片机
+关注
关注
59文章
549浏览量
58700 -
四轴飞行器
+关注
关注
55文章
206浏览量
51136 -
MPU6050
+关注
关注
39文章
307浏览量
71356
原文标题:毕业设计 | 基于STM32单片机搞定的四旋翼无人机飞控
文章出处:【微信号:精通单片机与嵌入式,微信公众号:精通单片机与嵌入式】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
小白带你入坑四旋翼无人机——物料篇 精选资料推荐
好像就在一个月前,我真正开始了和四旋翼无人机打交道。当时,我还是一个小白,对无人机什么都不了解,而现在。。我还是一个小白。。。现在就让这个白
发表于 09-02 07:50
多旋翼无人机飞控系统的设计资料分享
在进行多旋翼无人机飞控系统设计之前,有必要列写一份详细的设计方案书;这是飞控系统设计的基石,并且在一定程度上指导了后续的研发工作。本篇博文列
发表于 11-11 07:18
笔记:四旋翼无人机从0到1的实现,目录链接
0.1>0保持学习,每天都在进步,没有人,在年少时想成为一个普通人,四旋翼无人机从0到1的实现(一)无人机功能设计
发表于 12-09 17:06
•37次下载






 工商网监
工商网监
评论