 3D模板匹配算法概述
3D模板匹配算法概述
在PPF算法中,我们的目的是希望通过已有模型,能够在一个场景中匹配到和模型相似的目标。这是模板匹配最直观的说法。

图1 PPF算法论文
“Model Globally,, Match Locally”,顾名思义“整体建模,局部匹配”,因此算法是先对模型进行处理,再进行模型与目标匹配。算法流程如下:
(一) 整体建模
根据已建立的3D模型,计算3D模型表面上的特征点对的特征矢量;构建哈希表(Hash
table),将具有相同特征矢量的点对放在一起,如图2所示。
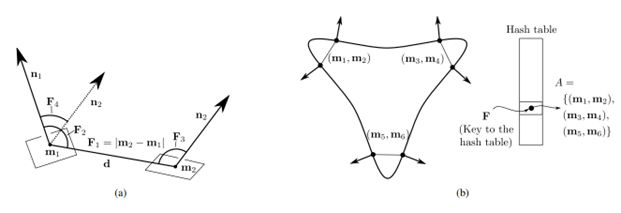
图2 模型特征点对和哈希表
(二) 局部匹配
• 在场景点云中任意选取一个参考点,假设它在物体的表面上,若假设正确,则在模型上存在一个点与之对应;
• 将这两个参考点配准,需同时将点的位置和法向量对齐。通过变换矩阵将模型的特征点对移动到一个新的空间上的原点,使其法向量轴与该空间的x轴重合。同理,将场景点云的特征点对做相同操作。

图3 模型点云点对特征和场景点云点对特征的配准
(三) 投票
在局部匹配中,我们引入了一个新的空间,现在需要想方法,每个变换中找到一个最优的变换矩阵,使得场景点云中落在模型点云表面的特征点最多,就能求得目标的位姿。论文通过投票机制实现,定义一个二维的数组,行数(row)为模型点云特征点对个数,列数(columns)为按采样步长的旋转角α个数。
• 之前我们在整体建模的过程中计算了模型点云的特征点对,现在我们对场景点云也做一次特征点对的计算;
• 以场景点云的特征点对作为key,去搜索整体建模时计算的哈希表,找到与场景点云特征点对相似的模型点云特征点对;
• 计算出两个点对之间的旋转角α,对二维数组中离散的角度对应位置投票+1;
• 全部计算完后,就可以得到最大票数对应的模型点云特征点对和旋转角。
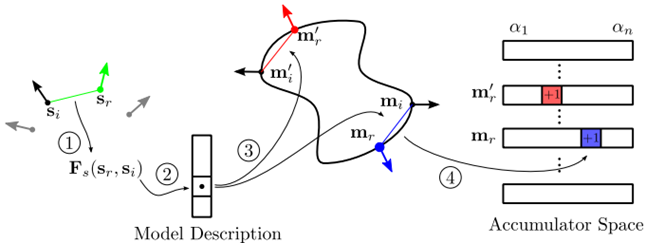
图4 场景特征点对搜索模型特征点对的哈希表
投票完成后,对于每一个场景点云特征点对,我们都到了一组满足条件的姿态。对于所有的姿态,通过聚类将之分成多个组。计算每个组内所有姿态的分数加权和作为该组的一个评分。每个姿态的分数即为该姿态在投票环节所得的票数。选取分数最高的组的所有姿态的均值作为最终的结果。
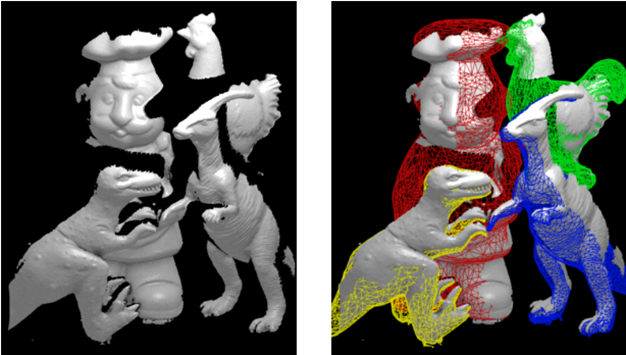
图5 PPF算法匹配结果
- 3D
+关注
关注
9文章
2826浏览量
106938 - 模型
+关注
关注
1文章
3008浏览量
48252 - 二维
+关注
关注
0文章
38浏览量
11958
原文标题:干货丨3D模板匹配算法概述
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
什么是模板匹配?模板匹配的原理讲解 图像处理与模板匹配算法
浩辰3D软件新手入门攻略:标准模板功能详解
3D分组密码算法
机器视觉中基于灰度统计的快速模板匹配算法详细概述

阿里研发全新3DAI算法,2D图片搜出3D模型
一种基于热核的3D对称图形匹配算法
基于热核的3D对称图形匹配算法及研究
基于热核的3D对称图形匹配算法研究

OpenCV边缘模板匹配算法原理详解






 工商网监
工商网监
评论