 基于FLEXMIN控制软件开发用于微创单孔手术的遥控外科手术机器人
基于FLEXMIN控制软件开发用于微创单孔手术的遥控外科手术机器人
作者:Christian Hatzfeld 和 Johannes Bilz
与传统的开放手术相比,通过小切口(或称为孔)进行的微创手术 (MIS) 可以减少组织创伤,从而帮助患者更快恢复,减少疼痛,并缩小疤痕组织。单孔手术能够更进一步减少创伤。在单孔手术中,外科医生将一根薄壁的管子插入一个小切口内,使用管内的腹腔镜器械进行手术。这些手术也可以通过自然腔道(如肚脐、喉咙或肛门)进行,根本不需要任何切口。
传统的单孔方法并非没有缺点。例如,它们使外科医生不得不在狭窄的工作空间内使用会限制操作灵活性的刚性器械进行手术。这些限制会导致器械位置频繁变动和器械相互碰撞。
为了应对这些挑战,我们设在达姆施塔特工业大学的研究小组开发了 FLEXMIN,这是一种通过自然腔道进行单孔手术的遥控外科手术机器人。我们采用基于模型的设计方法开发了用于 FLEXMIN 的控制软件。这种方法使我们能够对机器人的运动学进行建模,为它的 20 个电机设计一个控制系统,并为实时目标生成控制代码,所有这些操作都在同一个环境中完成。
1.FLEXMIN 硬件架构
FLEXMIN 系统由两个硬件子系统组成:触觉接口和体内机器人。实时控制系统负责解释外科医生在触觉接口端所做的动作,然后将其转化为电机指令,从而在腹腔内的机器人末端执行器(例如抓钳、持针器或其他器械)端产生动作。
体内机器人的两个手臂和一个内窥镜摄像头安放在一根直径为 40 毫米的管子内。外科医生可通过内窥镜摄像头看到每个手臂末端的末端执行器。这两个手臂由我们在 MATLAB中设计的铰接三脚架结构驱动。电机用于移动该运动结构中的三根平行杆,以便准确定位工具中心点 (TCP)(图 2)。每根杆由两个无刷直流电机驱动。一个电机用于平移运动,而另一个用于旋转运动。12 个电机安装在一个固定到管上的驱动装置中,通过 EtherCAT 连接到系统的实时计算机。
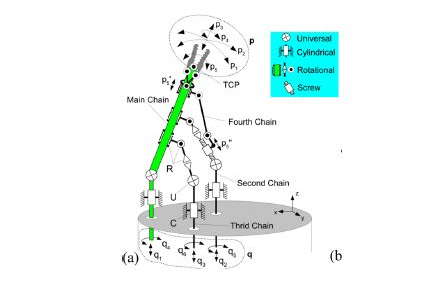
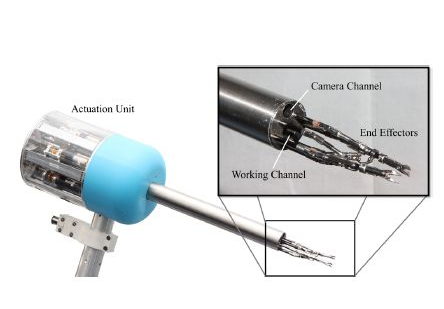
图 2. 上:每个手臂的平行三杆结构。下:用于驱动手臂的驱动装置。
FLEXMIN 触觉接口由外科医生直接操作。它的结构接近于体内机器人中使用的三脚架结构(图 3)。抓取和轴向扭矩的力反馈由两个无刷直流伺服电机产生,而另外三个电机提供 TCP 三维运动的触觉反馈。受控 TCP 的坐标使用电机上的旋转编码器进行测量。与体内机器人的组件一样,触觉接口中的编码器和电机通过 EtherCAT 网络链接到实时目标计算机。
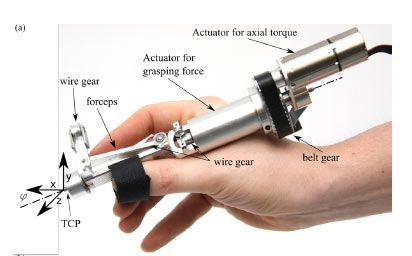
图 3. FLEXMIN 触觉接口。
2.设计和实现实时控制器
我们首先面临的一个控制设计挑战是将触觉接口的三维运动转化为 TCP 的相应运动。我们用两个 MATLAB 脚本就完成了这项任务。第一个脚本使用触觉接口中电机编码器的数据来计算 TCP 在笛卡尔空间中的期望位置。第二个则使用 TCP 的此位置来计算手臂中三根杆的对应位置,以及设置这些位置所需的电机指令。
我们的 Simulink控制器模型包含这些 MATLAB 脚本,以及通过 EtherCAT 总线与机器人的电机和传感器之间收发数据的 EtherCAT 模块。该模型还包括一个使用 Stateflow建模的大型状态图。我们使用该状态图来初始化电机控制器和管理整个 FLEXMIN 系统的状态。
为了实现触觉反馈,我们使用驱动装置上的六个传感器测量机器人抓钳处的器械与组织之间的相互作用力。在对这些传感器测量出的数据应用带通滤波器后,我们用它来计算作用于手臂三根杆上的力。我们还进行了额外的运动学计算,以基于杆的位置确定 TCP 所受的力。通过这些计算,我们能够确定抓钳受到的实际作用力,例如,外科医生抓取组织并开始拉扯它时的作用力。我们开发了一个 Simulink 模型。该模型使用此类力测量信息来控制触觉接口的电机,并为外科医生提供高达 15 牛顿力的触觉反馈,更新频率每秒多达 40 次(图 4)。

图 4. 用于控制触觉接口三个电机的 Simulink 模型。
在准备进行硬件测试时,我们使用 MATLAB Coder 和 Simulink Coder 从我们的模型中生成了 C 代码,并使用 Simulink Real-Time 在两台实时 PC(每个手臂各有一台)上运行该代码。每台 PC 都配备了 3 GHz Intel酷睿 2 双核处理器。这种设置使我们能够在实验室里测试、调试和优化体内机器人和触觉反馈接口的实时性能。
除了使用实验室设置进行开发之外,我们还以独立模式使用该设置。在这种模式下,计算机用我们软件的最新稳定版本启动,以便我们能够向感兴趣的研究人员演示我们的系统。这项功能很方便,让我们能够以最短的准备时间展示我们的工作。
3.外科实操测试和后续步骤
我们与来自蒂宾根大学附属医院的外科医生和学生们进行了多项实操测试。除了基本的缝合测试外,参与者还评估了 FLEXMIN 在猪模型中进行胆囊切除术时的灵活性和可用性。参与者表示,该系统的响应能力给他们留下了深刻的印象。他们注意到,他们的手和器械同步运动,毫无迟滞。他们还表示,该系统具有直观性,可以提供充足的空间,便于在腹腔内进行手术操作,这也让他们大开眼界。
在 FLEXMIN 的后续版本中,我们计划纳入预编程的动作(例如,能够让针自动穿过两个标记位置),以及抓取压力的触觉反馈。这些改进可能由我们的同事甚至是新加入小组的学生来实现。我们在研究中使用 MATLAB 和 Simulink 的一大优势在于,团队新成员能够快速上手我们的项目。在达姆施塔特工业大学,几乎所有的本科生和研究生都在他们的课程作业中用过 MATLAB 和 Simulink。此外,我们采用模块化的建模方法,这使得小组成员可以基于各自的模块独立工作,然后将这些模块组合成完整的系统。综合考量这些因素,我们很容易进行团队协作,甚至将项目移交给其他人。
关于作者
Christian Hatzfeld 博士负责领导达姆施塔特工业大学的触觉系统小组。他于 2008 年获得德国达姆施塔特工业大学精密工程文凭,并于 2013 年以一篇关于人类力量感知的论文获得了博士学位。他的研究方向包括医学应用中任务特定触觉系统的设计、心理物理学以及在设计方法中对触觉感知的系统考虑。
Johannes Bilz 是达姆施塔特工业大学微机电一体化和医疗机器人小组的助理研究员。他拥有达姆施塔特工业大学精密工程硕士学位。
审核编辑:郭婷
-
控制系统
+关注
关注
41文章
6604浏览量
110576 -
机器人
+关注
关注
211文章
28379浏览量
206914 -
电机
+关注
关注
142文章
9000浏览量
145337
原文标题:智慧医疗研学社 | 开发用于微创单孔手术的遥控外科手术机器人
文章出处:【微信号:MATLAB,微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
百洋医药携手ZAP,独家商业化头颈部放疗手术机器人
借助NVIDIA Holoscan实现实时手术指导
基于模型的显微手术机器人设计

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
微型导轨:手术机器人的高精度“骨骼”

FMEA在手术机器人研发中的应用

NVIDIA IGX与Holoscan走进外科手术室
NVIDIA与强生医疗科技合作,AI赋能数字手术生态系统
强生医疗科技与NVIDIA携手拓展AI在外科领域的应用

启扬RK3568核心板,助力外科手术机器人迈向智能诊疗之路







 工商网监
工商网监
评论