 OpenDRIVE高精地图的介绍&应用
OpenDRIVE高精地图的介绍&应用
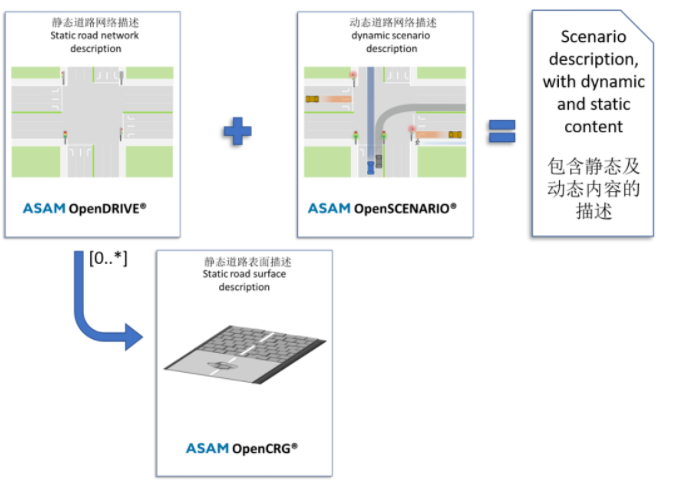
01 1.1 概述 精确数字化是数字道路数据生产的基础 高精地图所蕴含的信息丰富,含有道路类型、曲率、车道线位置等道路信息,以及路边基础设施、障碍物、交通标志等环境对象信息,同时包括交通流量、红绿灯状态信息等实时动态信息,采集及运用高精度数据均基于OpenDRIVE。 OpenDRIVE开发起因是VIRES公司在提供驾驶模拟器方案时,发现不同工具的道路数据格式中需要包含逻辑内容是基本一致的,为了方便在不同的驾驶模拟器间进行道路数据的传递,VIRES公司与Daimler Driving Simulator部门决定开发OpenDRIVE格式。转交给ASAM组织后,ASAM组织同样把OpenDRIVE定位为用于仿真测试的地图格式。OpenDRIVE是OpenX中众多标准的一个,主要用于描述路网结构,其与Openscenario和Openncrg一起共同描述场景、道路和路面情况,主要应用场景是用于仿真。
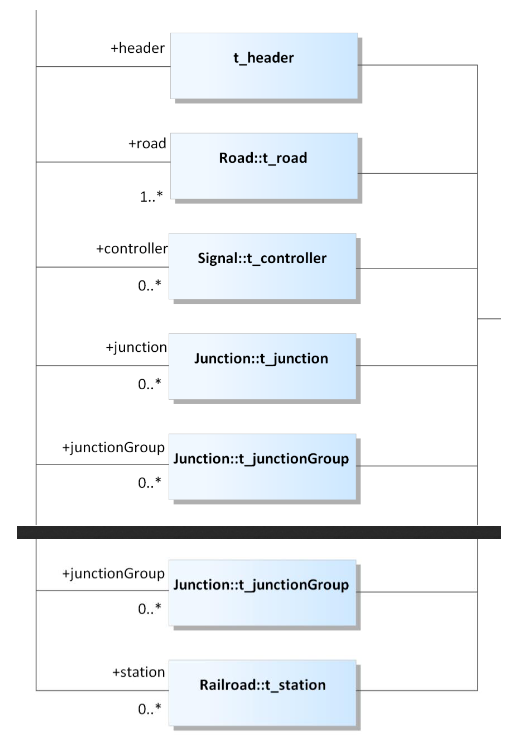
OpenDRIVE中描述的路网可以是人工生成或来自于真实世界。当前各大主流厂家均是采用人工和数据自动生成的方式来构建自己的场景库,OpenDRIVE的主要目的是提供可用于仿真的路网描述,并使这些路网描述之间可以进行交换。 1.2数据架构 对于OpenDRIVE文件中元素的定义整体架构如下图:
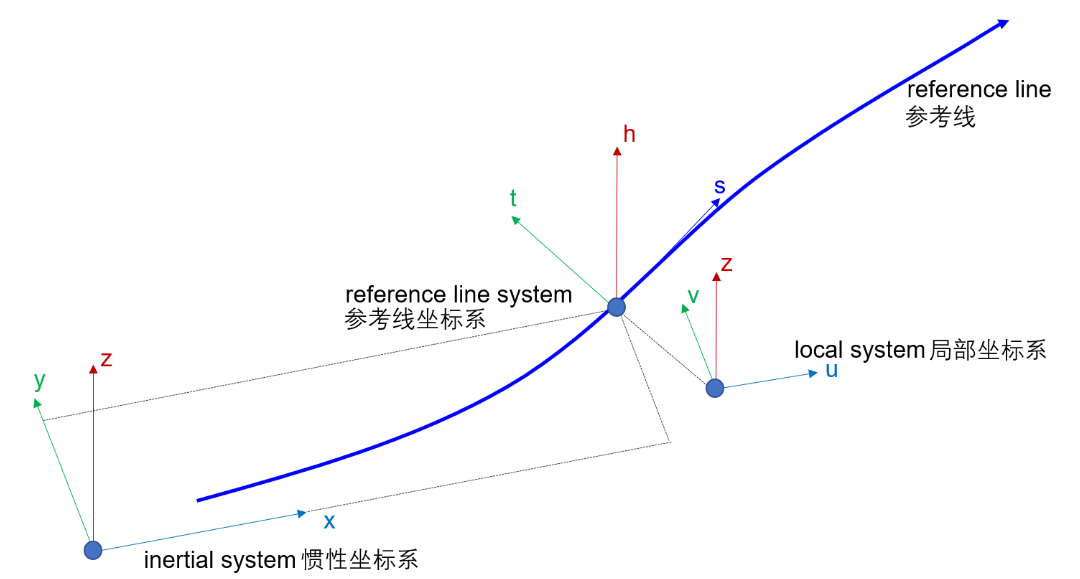
1.3坐标系
OpenDRIVE对路网结构的描述中采用以下三种坐标系:
- 惯性x/y/z轴坐标
- 系参考线s/t/h轴坐标系
- 局部u/v/z轴坐标系
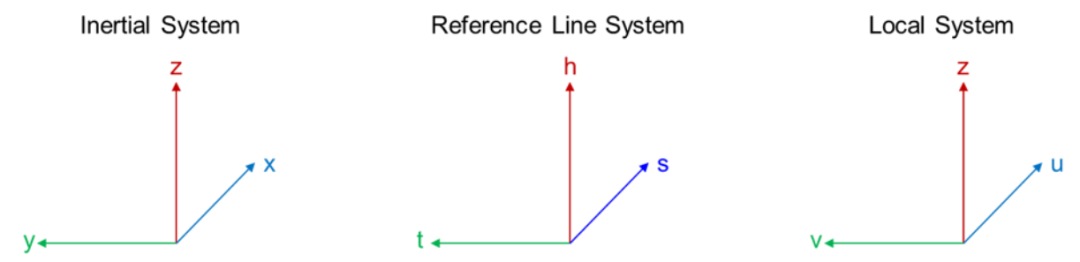
OpenDRIVE中使用的三种坐标系 三种坐标系之间采用以下的原则来处理:对局部坐标系的查找与定位将相对于参考线坐标系来进行。
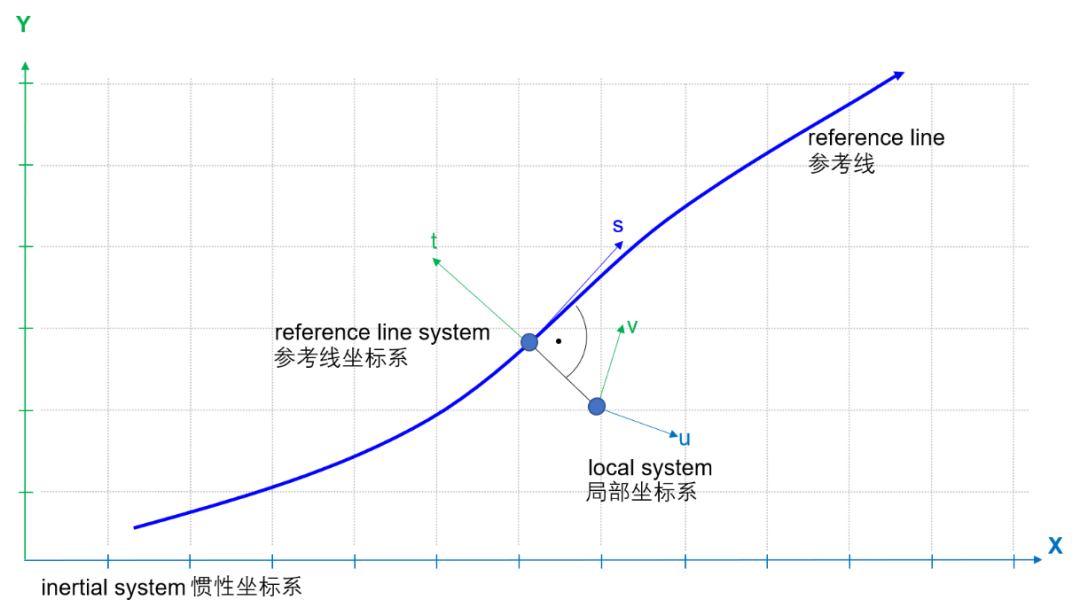
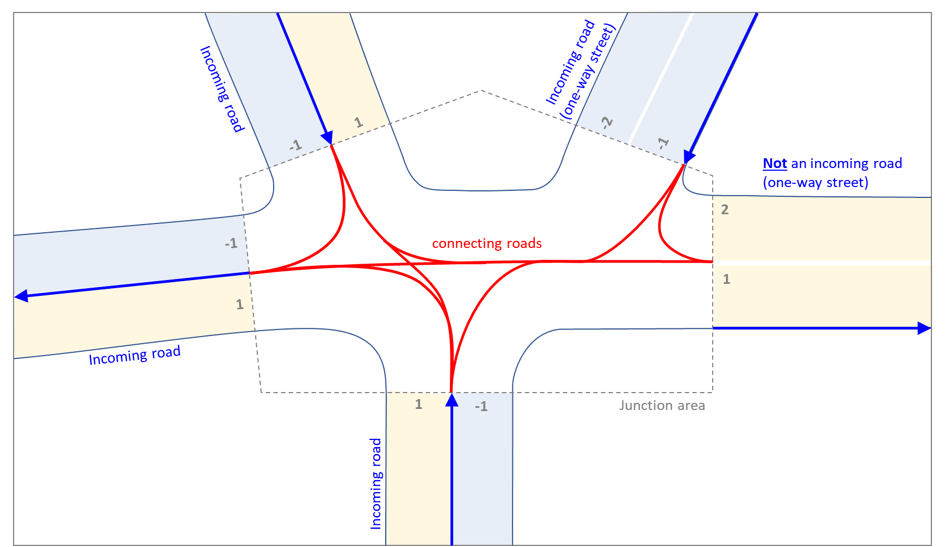
2.1道路参考线(reference line) 道路参考线可以理解为道路中心线在水平面的投影,也就是说道路参考线反映的是道路俯视的形状,而不包括坡度、起伏等特征。每条道路有且仅有一条道路参考线,该参考线可以由多条曲线连接而成,这些曲线的形式包括:直线、螺旋线、圆弧、三次多项式(不再使用)和三次多项式参数方程等。如下图所示:

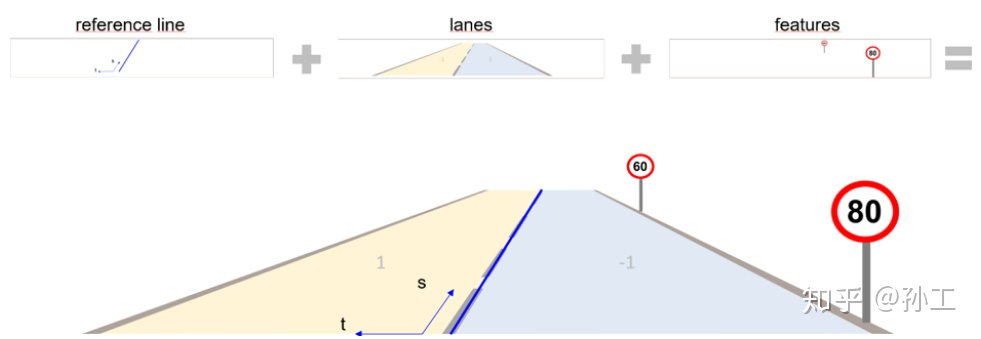
2.3车道(lanes) 每条道路都可以设置大于等于一条车道,可以有多条车道,还可以通过设置不同的车道分段来实现不同区域的车道数量和车道宽度的变化,如下图所示:
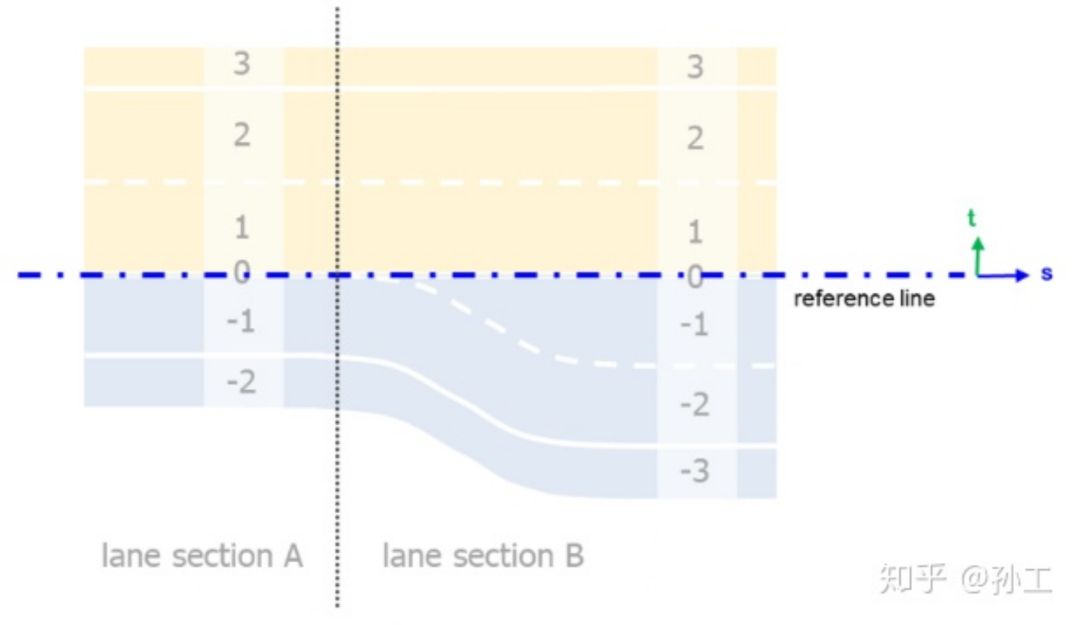
车道可以设置不同的属性,包括:宽度、类型、材质、限速、路权、车道线等。车道类型和车道线设置的示例如下图所示。

2.4道路设施(features)
道路设施包括物体(objects)和交通信号(signals)两种。物体包括停车位、隧道、桥梁、人行道和路障等类型,通过在道路s-t坐标系的位置、朝向和高度等属性进行定义。
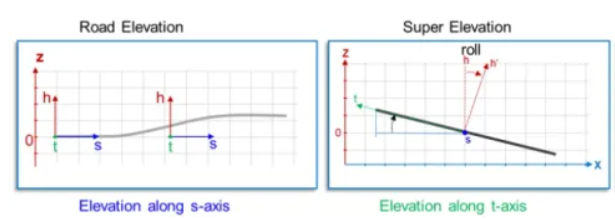
2.5道路高度(elevation)
道路的高度包括纵向坡度、超高等。
 03
OpenDRIVE主要应用
—全球范围内的汽车应用方面, OpenDRIVE主要应用于以下六个方面:
03
OpenDRIVE主要应用
—全球范围内的汽车应用方面, OpenDRIVE主要应用于以下六个方面:
- 精确的建设完成的数字道路数据生产
- 驾驶模拟器应用&赛道模拟
- CRG项目的高端曲表面模型
- 赛道
- 多分辨率的试验场、测试区和特殊轨道
- 公共道路
- 竣工的公路或主要道路的精确工程测量
- 城市内部道路网络的精确测量
- 地铁和隧道测量
- 铁路
- 机场
04
OpenDRIVE项目案例
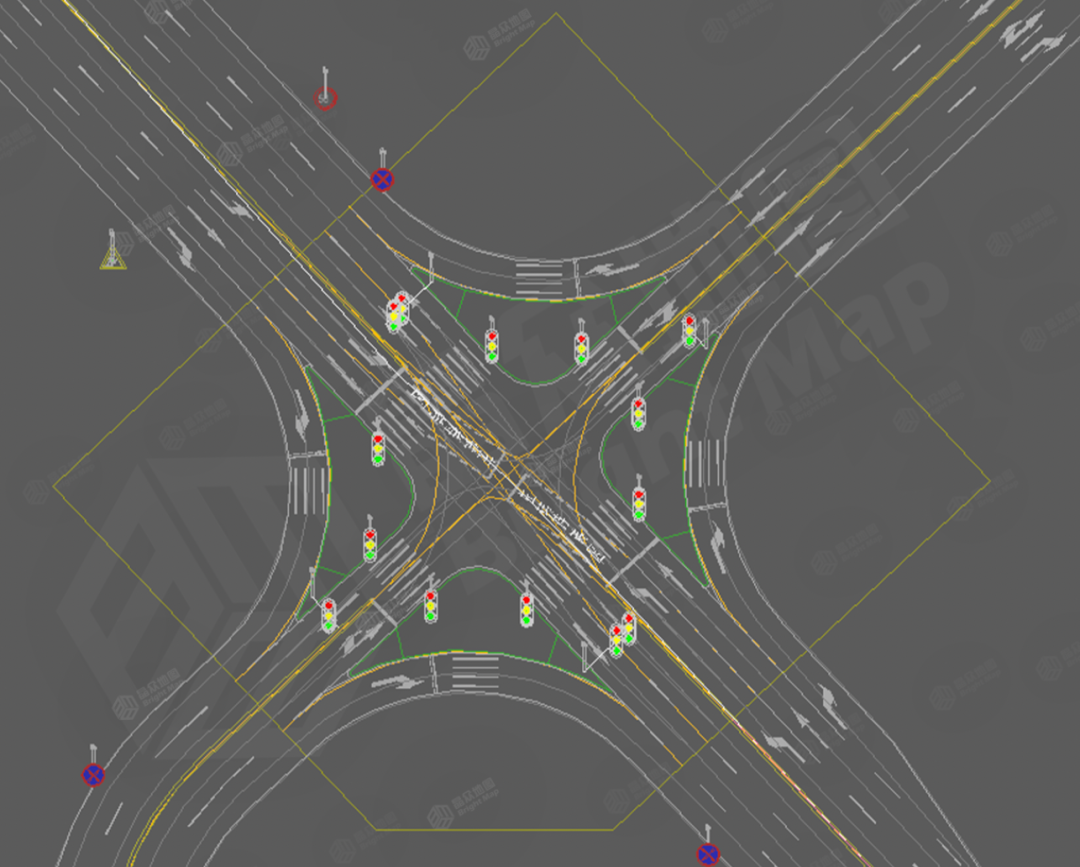
OpenDRIVE格式主要用于仿真和格式交换,晶众地图采用修改过的xodr格式对高精地图进行描述,支持OpenDRIVE格式的地图数据导入和导出。
晶众地图OpenDRIVE项目案例
—某自动驾驶测试场
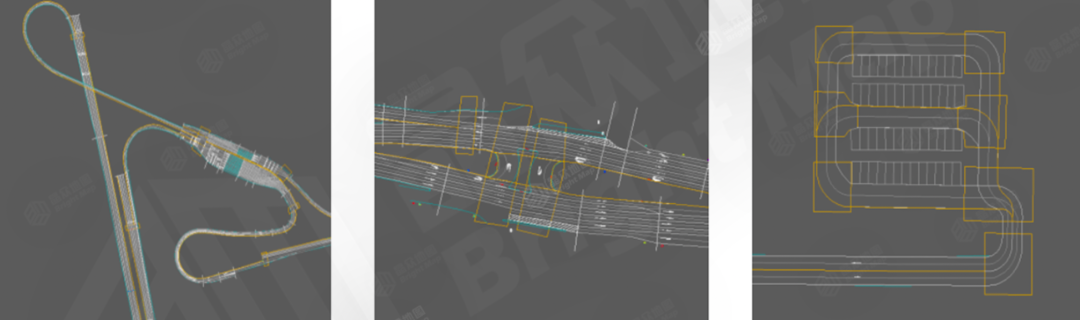
内容包括:
|
281道路参考线 |
72路口 |
2352车道 |
3056车道分隔线 |
|
333车道段 |
72停车位 |
607地面箭头 |
165地面文字 |
|
56停止线 |
81信号灯 |
283道路标志标牌 |
364支撑杆件 |
|
55绿化带 |
21安全岛 |
667路缘石 |
274道路高程线 |
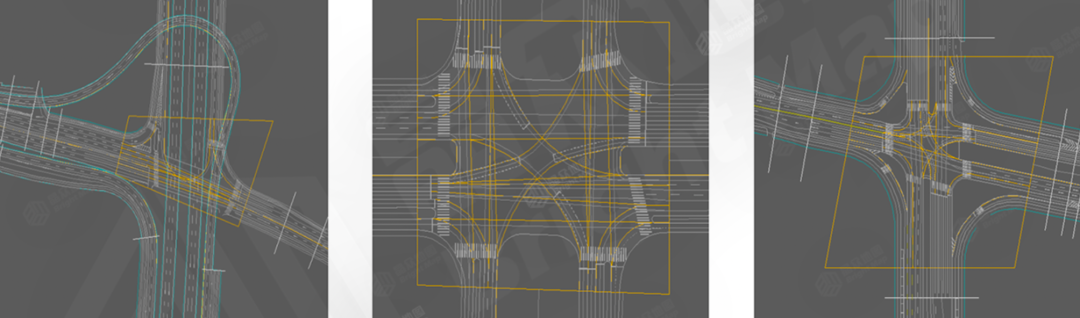

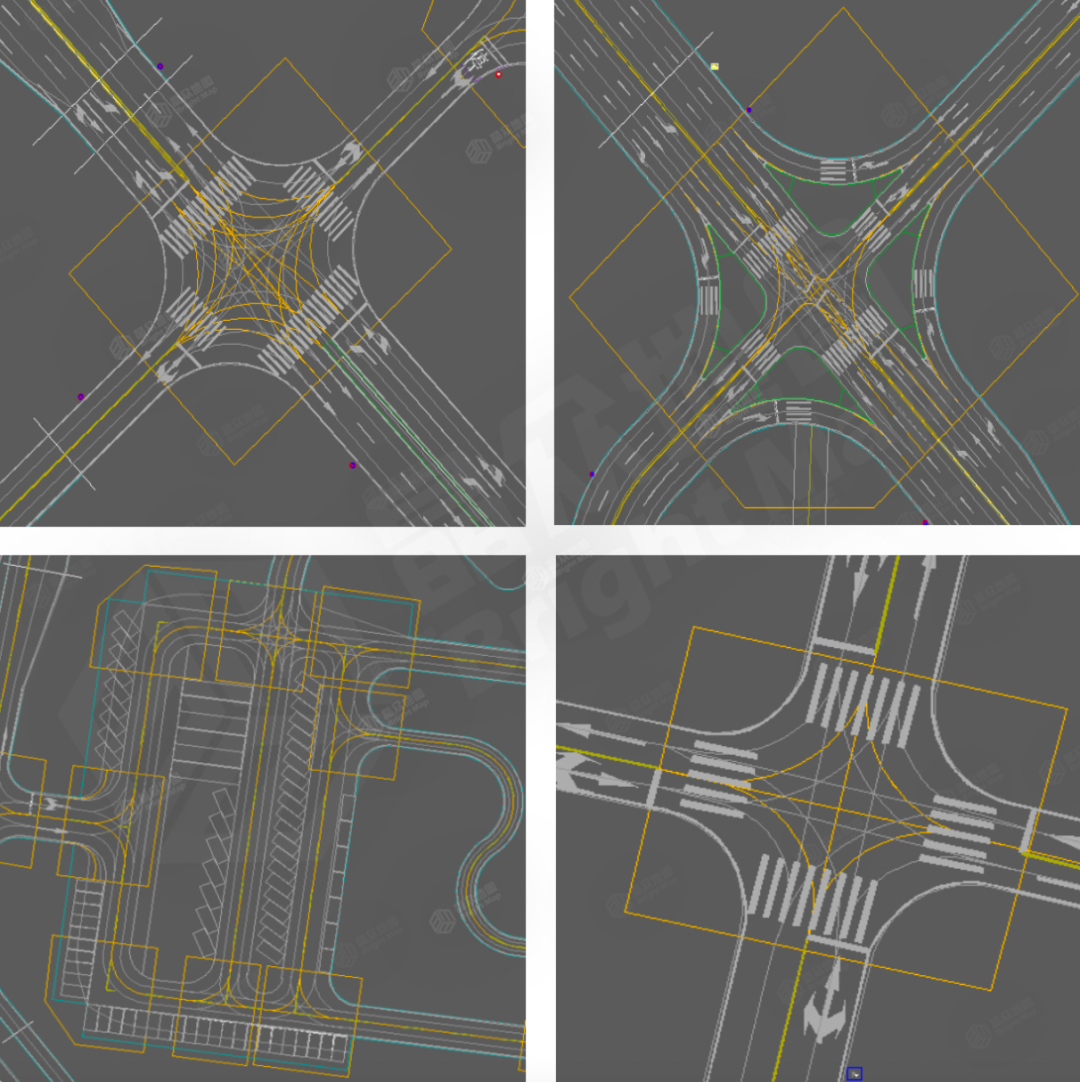
内容包括:
| 442道路参考线 |
49路口 |
996车道 |
|
1459车道分隔线 |
19车道段 |
81停车位 |
|
233地面箭头 |
11地面文字 |
65停止线 |
|
44人行横道面 |
270道路高程线 |
...... |
以下界面由某合作伙伴采用晶的地图和引擎进行开发



审核编辑 :李倩
-
模拟器
+关注
关注
2文章
874浏览量
43207 -
数字化
+关注
关注
8文章
8708浏览量
61722 -
高精地图
+关注
关注
0文章
27浏览量
2641
原文标题:OpenDRIVE高精地图的介绍&应用
文章出处:【微信号:BrightMap,微信公众号:晶众地图】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
北美运营商AT&T认证中的VoLTE测试项

北美运营商AT&amp;amp;T认证的费用受哪些因素影响

onsemi LV/MV MOSFET 产品介绍 &amp;amp; 行业应用

思瑞浦车规级产品矩阵,全面覆盖汽车级CAN&amp;amp;LIN、LDO需求

OC7201C资料(PCB &amp; 原理图)
FS201资料(pcb &amp; DEMO &amp; 原理图)
北美运营商AT&amp;amp;T认证入库产品范围名单相关
自动驾驶仿真测试实践:高精地图仿真

解读北美运营商,AT&amp;amp;T的认证分类与认证内容分享
智向未来,2024高通&amp;广和通边缘智能技术进化日成功举办







 工商网监
工商网监
评论