 什么是编码器呢?如何测量旋转量和旋转速度?
什么是编码器呢?如何测量旋转量和旋转速度?
如何测量旋转量和旋转速度?
在我们的日常生活中,周围有各种精密仪器和电子设备。比如家用电器,工业机器人以及其他一些机器,这些设备的基本配置如下。
根据控制器处理的信息移动设备的执行器;
为了快速,准确地控制这些设备,必须检测设备的运动状态。因此,使用称为编码器的传感器来检测旋转角度,移动距离和旋转/移动速度。
那么什么是编码器呢?
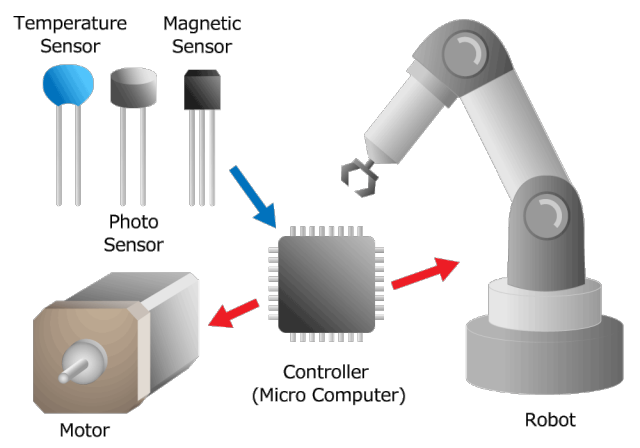
图1.传感器对于移动和控制各种物体至关重要。
什么是编码器?
编码器是对旋转角度和线性位移进行编码的传感器。
检测旋转的编码器称为旋转编码器,检测线性位移的编码器称为线性编码器。
实际上,因为在大多数情况下使用旋转类型,所以当人们只说编码器时,它通常指的是旋转编码器。在本文中,我们将主要着眼于旋转编码器。
编码器应用场景
正如开头所述,编码器用于需要高精度且快速运行的设备中。
一般来说,它是由电动机驱动的设备。例如,编码器广泛用于工厂中使用的工业机器人,例如组装机器人,焊接机器人,自动导向机和加工中心。
但是,大多数人从未见过工业机器人一直在工作的最新工厂。让我们来看一些实际使用编码器的情况。
工业自动化
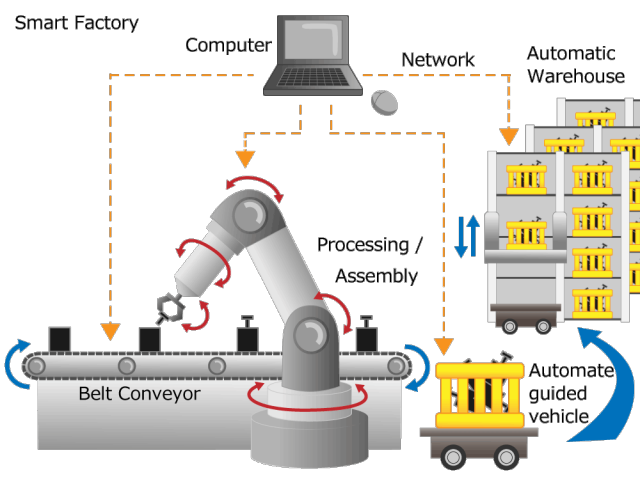
图2.工厂自动化(智能工厂)
在生产电器和汽车的工厂中使用了各种生产设备。
一台计算机控制由金属制成零件的机床,而一台机床可以完成诸如切割平面,钻孔和切槽之类的各种操作。
这种机床称为加工中心。生产的零件被送到组装工厂,并由工业机器人(例如专用组装机或手臂式机器人)自动组装。
最新的工厂是完全自动化的,并使用计算机和网络进行设计,零件加工,存储,管理,运输和装配的所有制造过程。“连接工厂”的概念称为工业4.0,此类工厂称为智能工厂。
工业机器人
工业机器人使人类摆脱了艰巨的工作,提高了工厂的生产率,并稳定了产品质量。
使用最广泛且实用性最高的工业机器人是具有多个关节的关节机器人,相当于人类的肩膀,肘部和手腕。
它的工作原理类似于具有旋转和滑动运动的人的手臂。控制器输入的信号通过执行器转换为运动,从而使机器人精确移动。
从人的肩膀到手腕的与“手臂”相对应的部分称为操纵器,从人的手腕到手指的与“手”相对应的部分称为末端执行器。
在工业机器人中,通过更换末端执行器,不仅可以抓握,还可以进行涂漆和焊接。如果您参观机器人或机床展览会,您实际上可以看到各种公司展出的机器人。
图3.工业机器人图
执行器
电动机被用作机器人执行器是因为它们易于小型化并且具有高精度。
在实际情况中,人们通过将减速齿轮与电动机的输出轴集成到电动机的输出轴上并降低电动机的转速来使用具有增大的旋转力(转矩)的制动器。
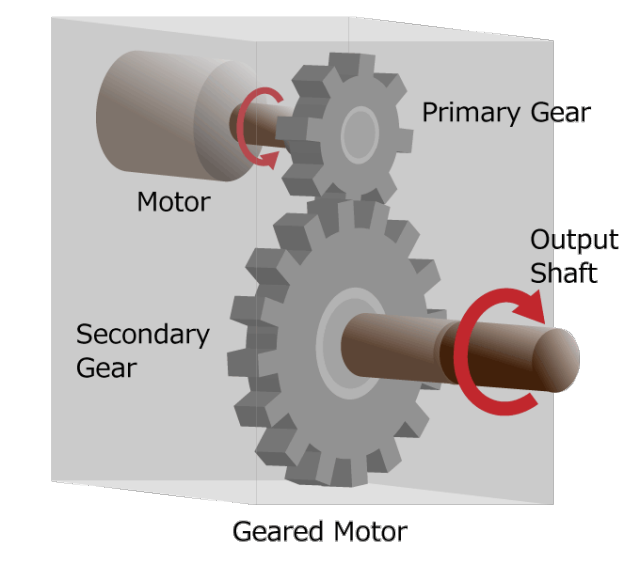
图4A 减速电机图
还有一种电动滑动器,其通过利用螺钉将运动从旋转改变为线性而在运动方向上产生很大的力。正如下图所示;
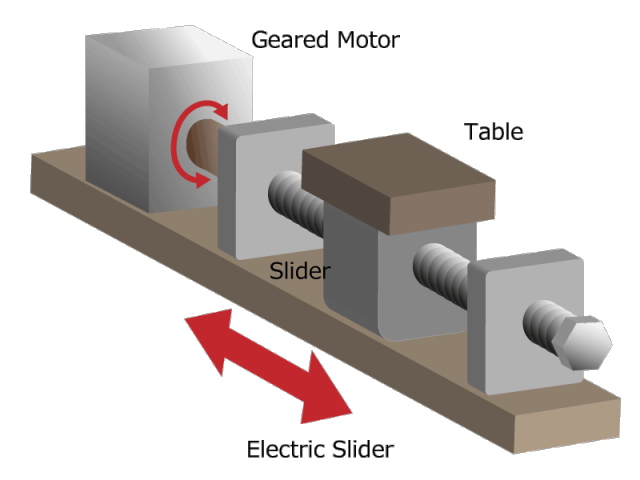
图4B 电动滑块图
伺服电机
电机的种类繁多,在本文中,我们将重点介绍使用编码器的电机。
一个例子是伺服电机。伺服电机是伺服机构中使用的电动机。
伺服机构是使连续旋转运动或线性运动的速度保持恒定,或者精确控制一个运动的旋转角度和移动距离的机制。
伺服电机由无刷直流或交流电机,编码器和驱动器组成。
为了使无刷直流电动机或交流电动机的转速保持恒定,编码器检测转速。
如果检测到的速度比设定的旋转速度慢,则伺服放大器控制使电动机旋转更快;
如果检测到的速度小于设定的旋转速度,则伺服放大器进行控制。
为了精确地控制电动机的旋转角,编码器检测旋转角。伺服放大器通过检查电动机是否已移动到目标旋转角来控制电动机的旋转角。
这种通过使用编码器检测电机转速和旋转角度的控制方法称为反馈控制(闭环)。
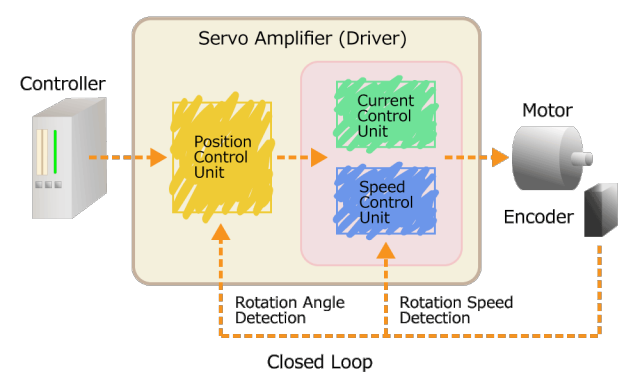
图5 伺服电动机图
步进电机
步进电机是输入相应脉冲信号时可以旋转一定角度的电机。
步进电机可以不带反馈(开环)使用,因为旋转角度和旋转速度取决于施加到电机的脉冲信号的数量以及脉冲之间的间隔。
由于该方法不使用编码器,因此系统比较简单。但是,步进电动机运行效率会大大降低。因为它总是以最大电流运行以防止失步。
如果通过使用编码器检查其是否按照指令旋转并反馈结果,就不必保持最大电流,从而降低了系统的功耗。
此外,通过使用编码器检查负载状态,可以在不失步的范围内使执行器的运行速度最大化。这将提高生产率。有时人们称这种方式使用的电机为步进伺服电机。
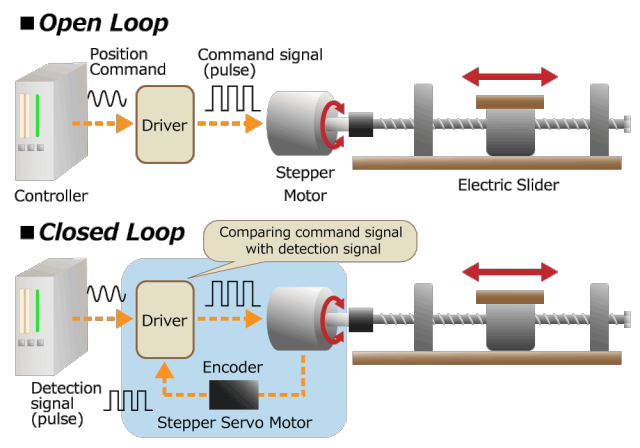
图6 步进电机的使用
检测旋转和角度的机制是什么?
图7 将旋转运动转换为旋转信息的过程
前面,我们提到编码器是一种检测旋转角度,线性位移和速度的传感器。
传感器是检测自然现象变化的元件或电子组件。
例如,光学传感器检测光的开/关,而磁传感器检测磁场的分布。
传感器具有以下作用:通过将检测到的物理量变化作为电信号输出,并且可以将信息发送到外部。如上图所示,编码器从传感器元件输出的电信号,最后将旋转/角度信息作为数字或vwin 电信号发送到外部。
旋转时什么物理量会变化?
待测物理量的差异意味着传感器检测方法的差异,因此它是决定编码器优缺点的重要组成部分。
根据检测方法,编码器分为以下四种类型:机械,光学,磁性和电磁感应类型。
机械式(接触式)
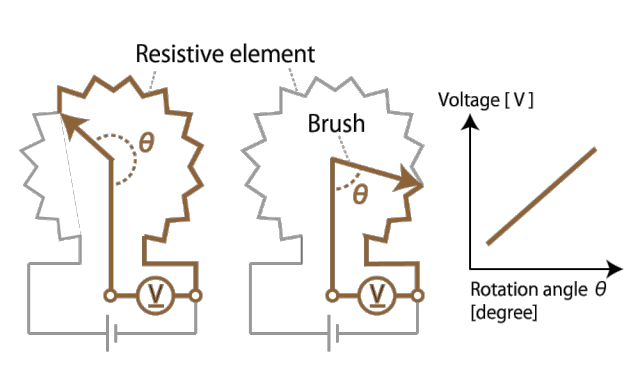
图8 机械(接触式)编码器图
该方法利用可变电阻器检测旋转位置,该可变电阻器的电阻与旋转角度成比例地变化。这种机械编码器通常称为电位器。
当滑块在电阻上移动时,电位计的电阻值将与滑块的移动距离成比例地变化。
光学型
这是一种使用光电传感器检测光是否通过安装在电机轴上旋转的码盘的径向上的缝隙的方法。
光脉冲信号通过狭缝时会发生变化,并且可以通过对脉冲数进行计数来检测电机轴的旋转量。
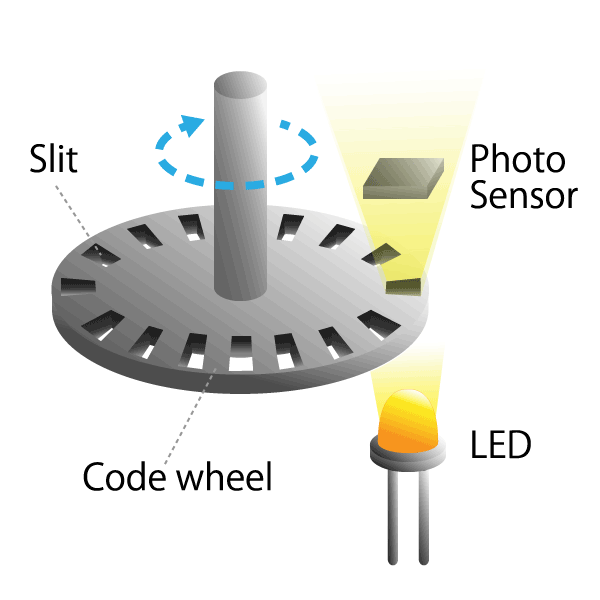
图9 光学编码器图
电磁式
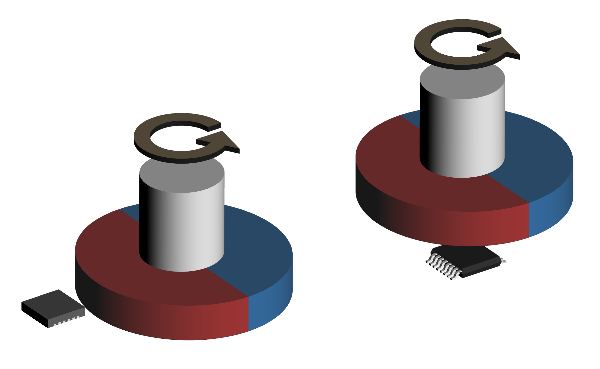
图10 磁性编码器图
该方法使用磁传感器来测量由安装在电机轴上的永磁体产生的磁场分布的变化。
电动机旋转时,永磁体的磁场分布也会发生变化,因此,如果使用磁传感器检测到它,则可以确定电动机轴的旋转位置。
电磁感应式
该方法读取安装在电机轴上的感应线圈(励磁线圈)和固定线圈(检测线圈)之间产生的磁场变化。
基本原理与使用电磁感应的变压器相同,这种编码器称为旋转变压器。由于使用电刷的接触方法,旋转变压器旋转感应线圈的电源存在磨损的风险。但是,有一个VR(可变电抗)解析器可以改善这种风险。
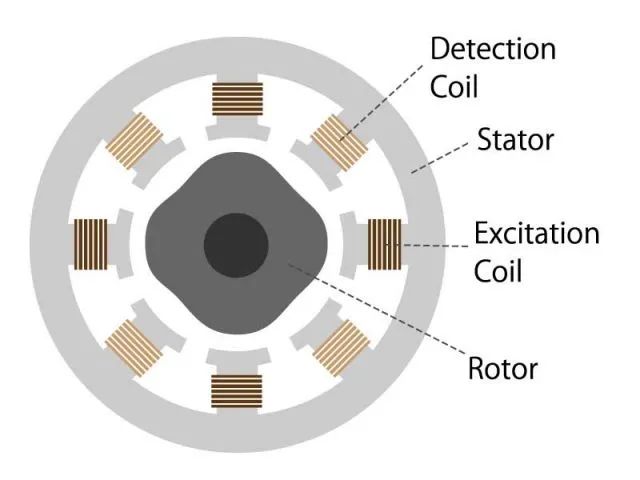
图11 电磁感应编码器图
有哪些类型的旋转和角度信息?
旋转状态是什么?以电机为例,它停止运转,顺时针旋转,逆时针旋转,以恒定速度旋转,加速,减速等等。
准确掌握这些条件并准确控制电机需要四种信息:旋转量,旋转速度,旋转方向和旋转位置。
旋转角度
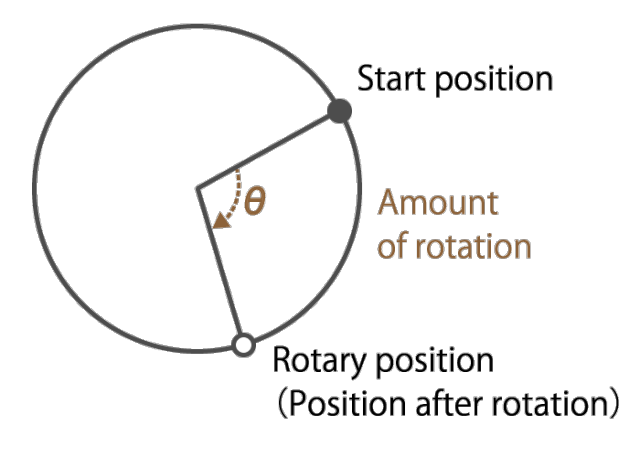
图12 旋转量说明
这是有关电动机轴角已移动多少次的信息。
例如,在无刷直流电动机中,可以通过检测转子的磁极的变化来知道转子的旋转量,并有效地使电动机旋转。
转速
这是有关电机轴旋转速度的信息。
正如我们前面提到的,伺服电动机检测无刷直流电动机或交流电动机的转速,并执行反馈控制,以使电动机轴以伺服放大器设定的速度旋转。
旋转方向
这是有关电动机轴旋转方向(顺时针或逆时针)的信息。
在通过从编码器输出的脉冲数检测电动机轴的旋转量的系统中,如果无法识别旋转方向,则错误地对旋转量进行计数。
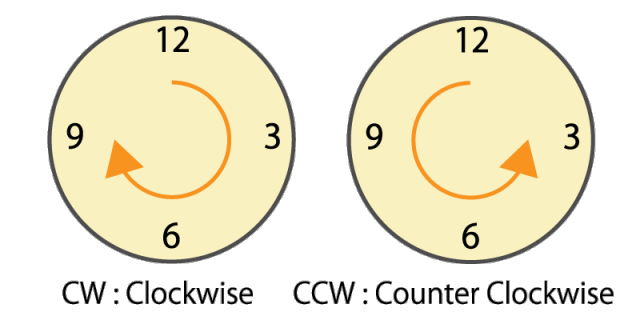
图13 顺时针和逆时针
旋转位置
这是有关电机轴角度多少度的信息。
正如我们前面提到的,伺服电机和步进伺服电机使用编码器来检测旋转角度并执行反馈控制,同时判断是否已达到目标旋转角度。从而实现高精度的位置控制。
总结
本文简单介绍编码器的相关概念,编码器是检测旋转角度或线性位移的传感器;用于需要高速,高精度运行的设备中。通过检测电动机的转速和旋转角来控制电动机的旋转的方法称为反馈控制(闭环方法)。
编码器分为四种类型:机械,光学,磁性和电磁感应类型。为了使电动机高精度旋转,需要获取系统四种信息:旋转量,旋转速度,旋转方向和旋转位置。
审核编辑:刘清
- 传感器
+关注
关注
2541文章
49687浏览量
746230 - 控制器
+关注
关注
112文章
15793浏览量
174748 - 编码器
+关注
关注
44文章
3510浏览量
133036 - 制动器
+关注
关注
0文章
104浏览量
14367
发布评论请先登录
相关推荐

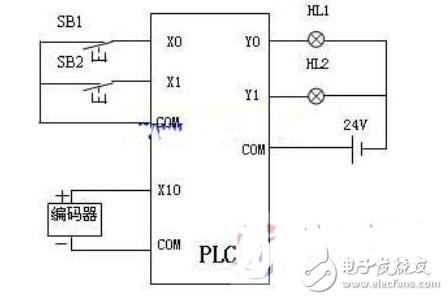
旋转编码器参数_旋转编码器与plc连接
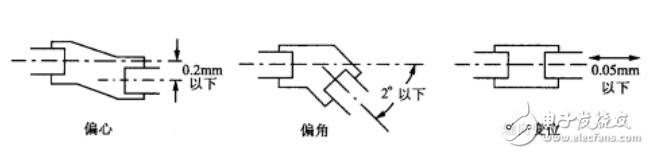
旋转编码器能直接换吗_旋转编码器更换注意事项
带Arduino的旋转编码器设计旋转编码器的工作原理和特点





 工商网监
工商网监
评论