 速锐得解码本田雅阁混动版整车网关CAN总线通信协议DBC控制策略
速锐得解码本田雅阁混动版整车网关CAN总线通信协议DBC控制策略
本田汽车增城工厂就在附近50多公里的地方,和比亚迪汽车差不多,无论怎么跑都得1个多小时,也因为近水楼台的天然优势,而我们也与本田安全驾驶中心有多次深度的合作。碗里的肉,基本上都是上过了速锐得砧板。
近,有几个好处,天然的响应速度,更快地验证可行性,可以厚着脸皮去蹭饭。相对而言,跨省的项目做起来,时间周期上就会存在预约的情况了。曾记得2016年与本田开始合作试乘试驾管理项目,主要是采集车速、点火状态、转速、里程、轨迹、转向灯相关信息,他们用于对所有本田的试乘试驾车辆进行对应的管理,根据试乘试驾的热力图,投放对应的车型、广告、物流、仓储等等。
如果是熟悉本田的用户或者专业人士,看过电视的广告,说本田的安全气囊永远都比别人快0.1秒,大概就是这么测试投入出来的。在2019年速锐得与本田安全驾驶中心合作中,本田要完成检验自己的控制器,在加速、刹车、ABS、水温、进气阀、里程、刹车距离、最高车速等不同状态测试ECU控制单元的输出曲线值用于汽车驾驶中的各种情况控制,这些数据都需要接入本田的网关系统。
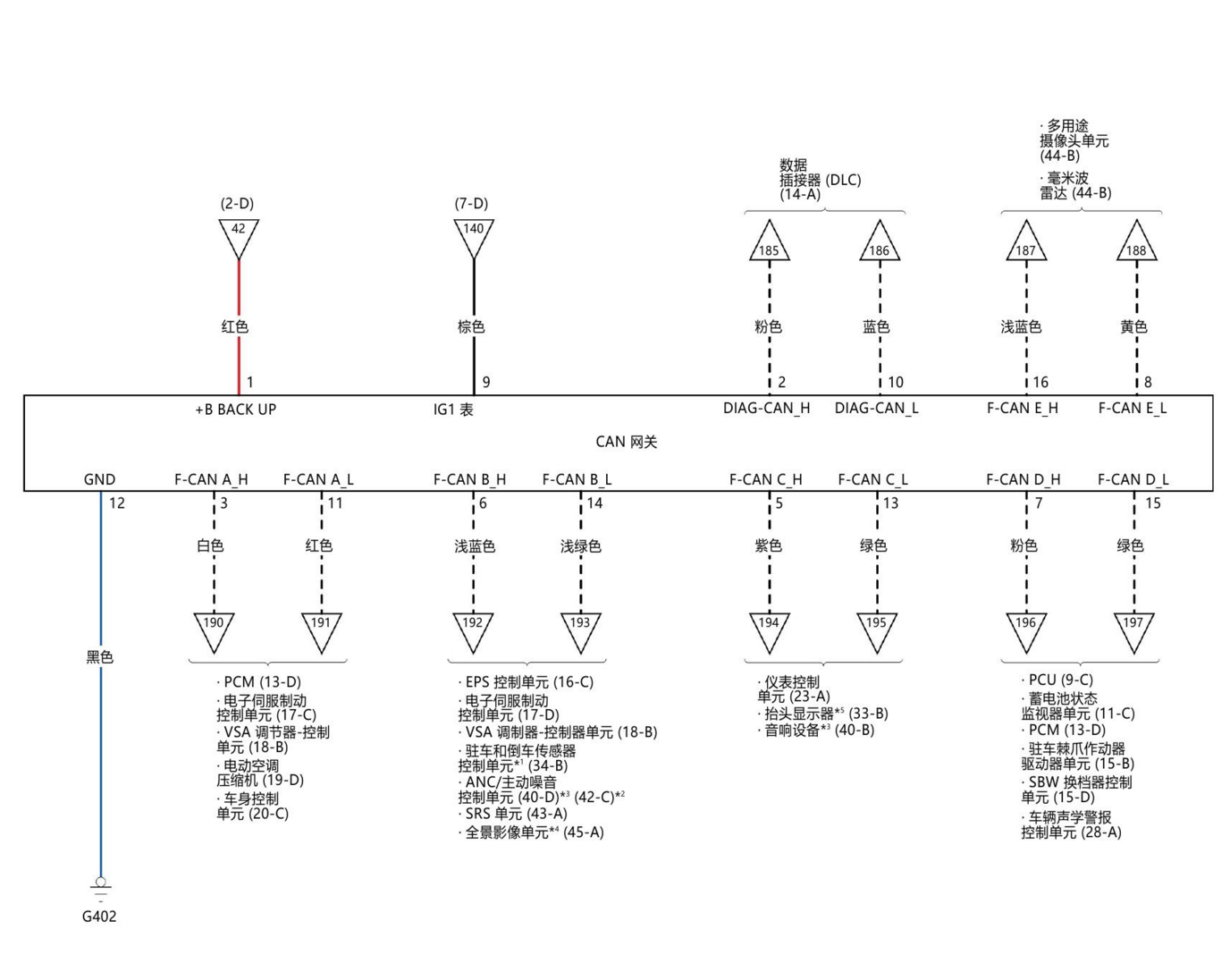
本田的网关系统图纸如下所示:
近期,应本田的本田安全驾驶中心研发周总监的邀请,需要速锐得针对新款本田雅阁混动版整车网关CAN总线通信协议采集DBC,主要解决几个问题:1、解决车辆报故障问题、2、解决档位逻辑问题、3、刹车行程、方向盘转向角度、行驶状态下档位DBC,4、OBD输出信号限流。
从第一个问题分析,报故障问题,这种多为控制器协议与原车协议不匹配,要么控制器需要根据传感器或者指定单元过来的数据协议变更为兼容的协议类型,要么数据频率不对导致仪表盘报警。这个问题在改装领域经常发生,比如协议格式不对,或者协议内容不同,或者协议的频率不同都会给汽车带来故障码或者控制单元失效。这个问题很好解决,其实只要把两端的CAN数据协议、报文、频率归纳成一致性的,基本就可以解决了,这个有点太简单。
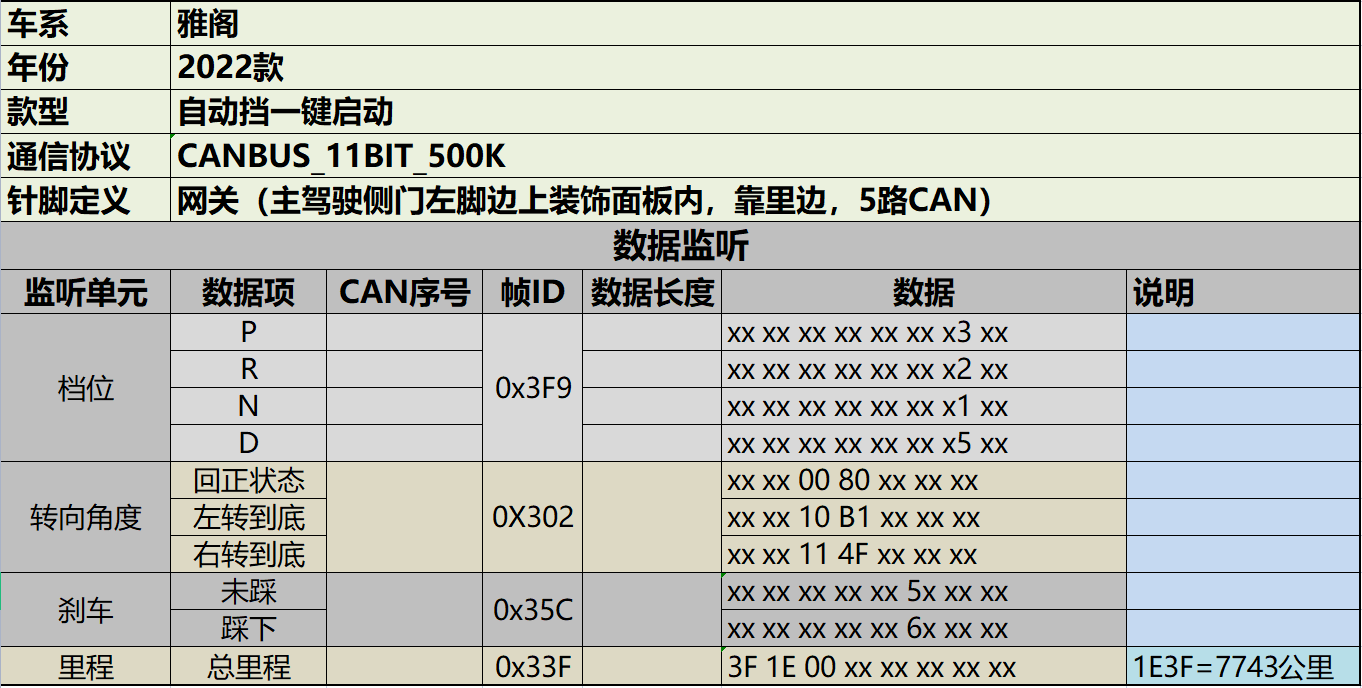
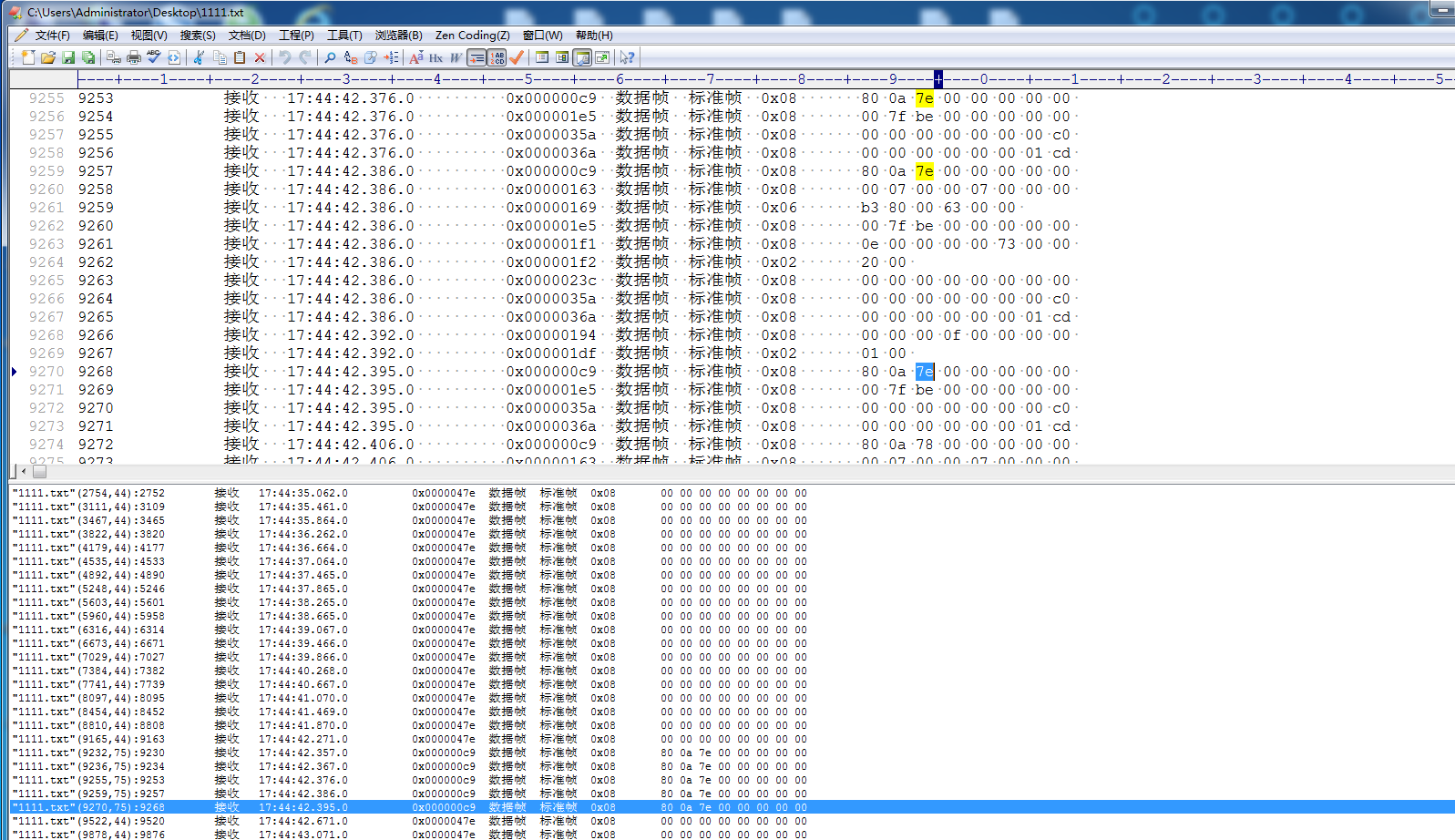
速锐得根据采集和分析本田雅阁部分简单报文如下所示:
第二个问题,档位逻辑和第三个问题可以同步处理,这些都是驾驶类的数据类目。本田雅阁混动版的电机转向命令包括正转(对应前进挡D),反转(对应后退挡R)及空转(对应挡N)。自带转向切换的车速保护,需考虑车辆前进时(车速为正)挂R挡和车辆后退时(车速为负)挂D挡给电机的转向指令。允许进行挡位切换的条件为车速小于一定值(如3km/h),但不允许大于该值进行挡位切换。车速如果过高就进行转向的切换,会有较大的冲击,可能会产生危险或对电机造成伤害。如果车速大于该标定值,输出的转向指令应为空挡。
根据电机反馈的转速确定电机所处的转向状态,电机的转速在一定的正负限制值之间,电机处于空转状态;电机未处于空转状态,同时电机的转速大于零,电机处于正转状态;电机既未处于空转状态,也未处于正转状态,则电机处于反转状态。
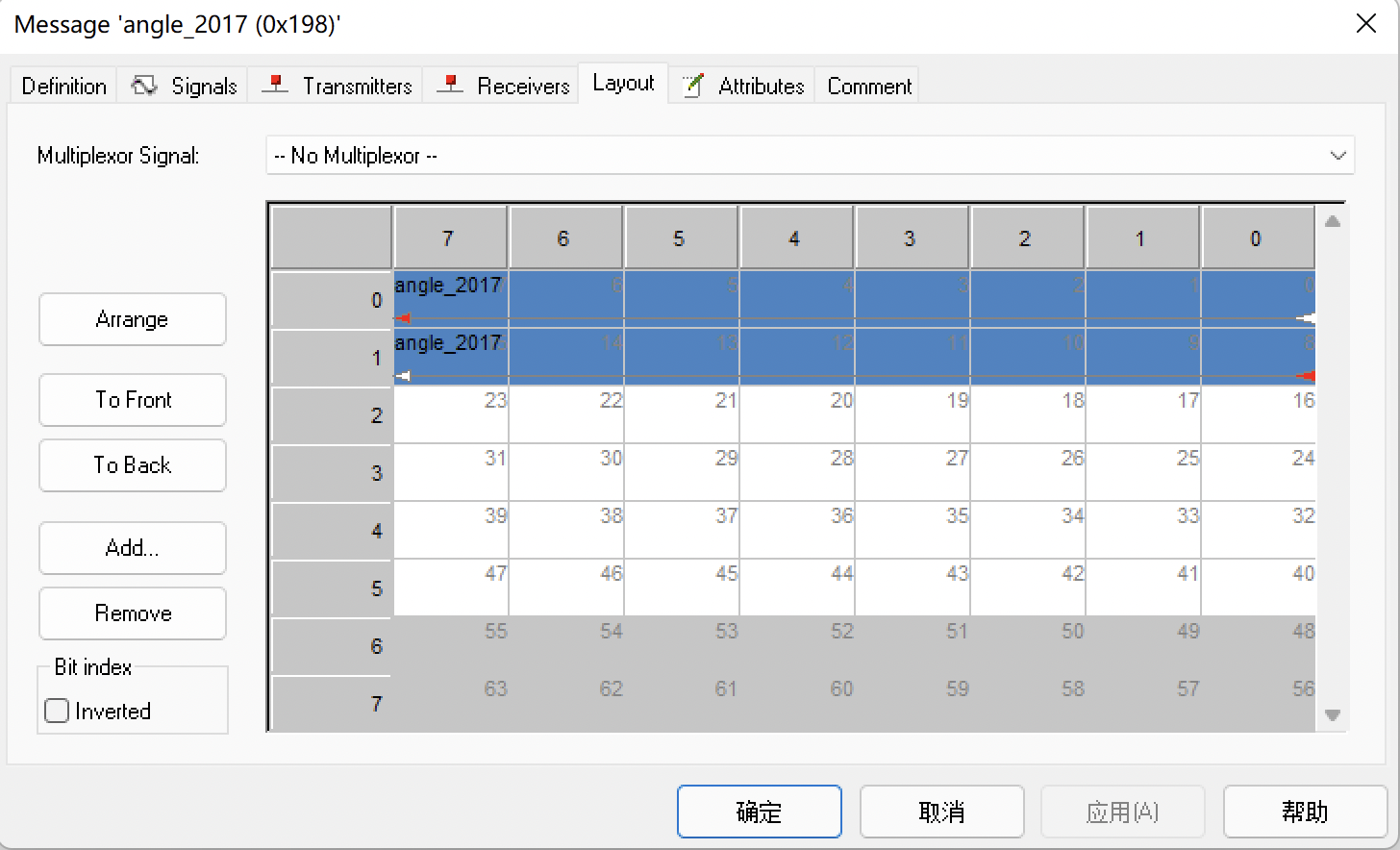
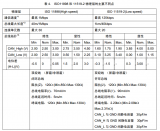
本田档位DBC编译后输出矩阵图,如下所示:
考虑到允许进入该转向模式的扭矩因素,当扭矩动态管理模块输出的电机扭矩指令大于-5Nm(标定值),同时换挡器的输入为D挡,混动电机所处的转向状态为正转,则允许输出正转。当扭矩动态管理模块输出的电机扭矩指令小于5Nm(标定值),同时换挡器的输入为R挡,电机所处的转向状态为反转,则允许输出反转。非动力挡向动力挡切换时需要踩刹车,若没有踩刹车,则认为是N挡,并且必须将挡位挂为N挡才可以尝试重新挂入动力挡;如果车速大于3km/h(TBD),则允许不踩刹车的情况下由N挡挂入动力挡。
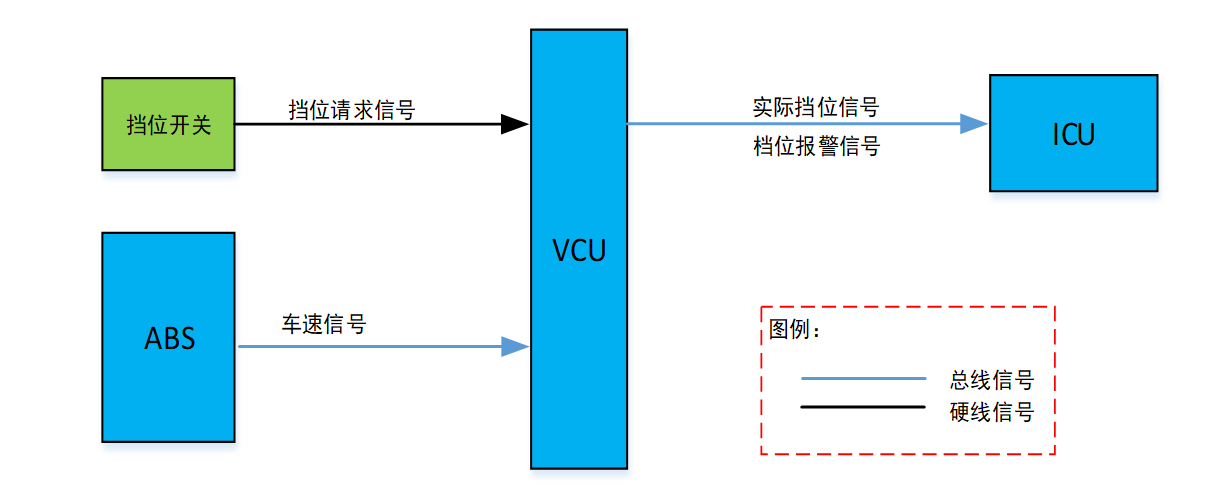
本田雅阁混动的整车控制器将物理挡位发送给仪表ECU将处理之后的实际挡位发送给BCM,倒车雷达等ECU供相关动作执行;如果驾驶请求挡位(输入挡位)和VCU处理后的实际挡位不一致,则发送报警信号到仪表,D档和S档可直接切换。
档位信号采用硬线信号,由整车控制器接收处理。
| 档位 | 信号 |
|---|---|
| D | D档输出高有效 |
| N | N档输出高有效 |
| R | R档输出高有效 |
| S | D、S档同时输出高有效 |
第四个问题,直接软件解决,通过控制OBD这边的输入频率就可以了,因为本田雅阁混动版的内部数据很多是以毫秒级计算的,数据过快会导致芯片工作运营效率降低,OBD本身不是重要的外扩单元,只是用于常规诊断,对数据的实时性要求不高,通过政策控制器的频率降低,解决这个问题,相对来说,是最简单直接的。
经过本田安全驾驶中心测试,部分微调以外,其他基本搞定,后面拿了新款本田凌派测试,数据一致性完美兼容,那么,意味着,本田这个CGP平台,可以拍胸脯了。
审核编辑 黄昊宇
- CAN
+关注
关注
57文章
2624浏览量
462007 - 网关
+关注
关注
9文章
3890浏览量
50442 - 汽车
+关注
关注
12文章
3213浏览量
36712
发布评论请先登录
相关推荐
上位机与下位机通信协议的优化策略
can的通信协议主要由什么完成
can总线中断状态什么意思呢?
什么是CAN总线协议?它有哪些特性和应用?
速锐得深入解析吉利几何CAN总线数据通信网络的拓扑层级框架技术

艾瑞泽5汽车电子控制单元CAN通信数据读写车辆网络系统交互接口
艾瑞泽5汽车电子控制单元CAN通信数据读写车辆网络系统交互接口
零跑新能源动力电池CAN数据采集BMS协议速锐得DBC开发方案


CAN总线初学者入门资料
mdobus ASCII协议转换网关支持CANOPEN JAE1939






 工商网监
工商网监
评论