 如何在ADAS应用中成功使用NI AWR设计环境平台
如何在ADAS应用中成功使用NI AWR设计环境平台
大多数交通事故的发生是由于驾驶人员的错误,高级驾驶辅助系统(ADAS)通过提出各种各样的问题,包括碰撞避让、胎压过低,来警醒和辅助驾驶人员,被证明可减小伤亡。
ADAS使用的雷达技术主要聚焦在频率76-81GHz。这些雷达需要面对各种各样的应用、工作条件和目标检测的挑战,以提供特定驾驶人员辅助功能所需要的可靠覆盖范围(距离)和视场(角度)。
本文给出了为下一代智能汽车开发毫米波雷达系统和天线阵列技术背后的挑战性技术,用实例阐述了如何在ADAS应用中成功使用NI AWR设计环境平台,特别是Visual System Simulator (VSS)系统设计软件内的雷达设计功能。
ADAS技术
目前,制造商基于视觉传感器技术和工作于24GHz与/或77GHz的雷达系统来实现这些系统。视觉系统检测道路标识,处理其他的可视化道路信息,但是容易受到降水特别是雾与雪导致的性能下降的影响,也容易受距离的影响。
另一方面,远距离雷达(LRR)支持多种功能,能轻松处理30到200 米的距离,近距离雷达(SRR)能检测低于30米的距离。支持LRR的77GHz频段(76-81GHz)预期将为未来的汽车同时提供近距离和远距离检测。图1给出了近/中和远距离雷达的详细参数。
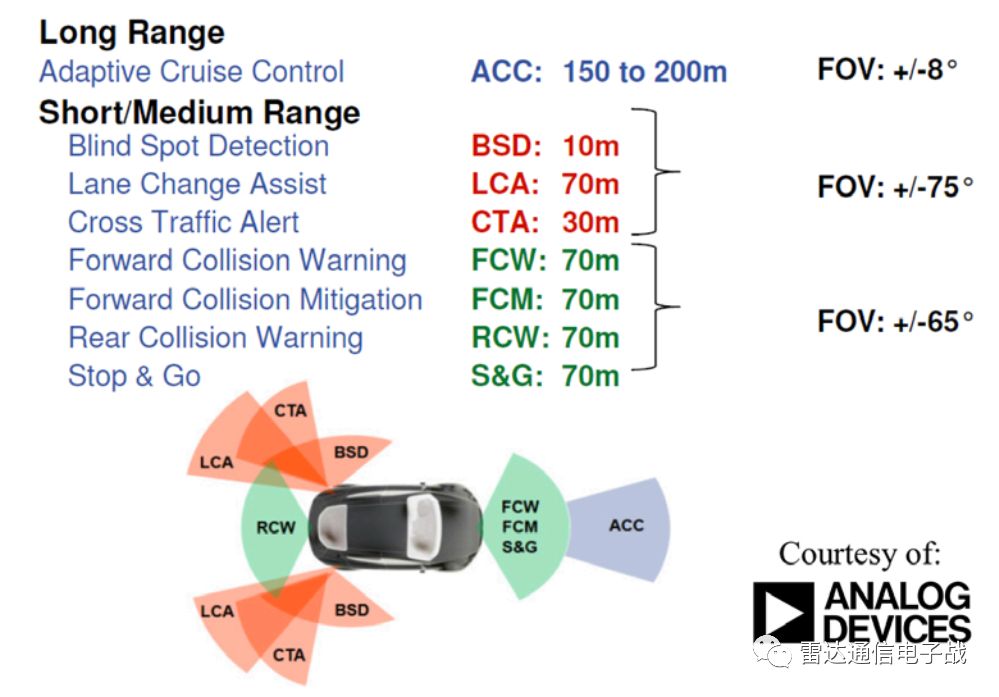
77GHz频段的技术优点包括:天线较小(只有目前24GHz的三分之一)、允许的发射功率较高,更重要的是可以得到较宽的带宽,从而获得较高的目标分辨率。雷达调制技术、天线波束控制、系统结构以及半导体技术的进步,促使人们在未来ADAS汽车中快速选择毫米波雷达。
为了应用好这些技术,雷达开发者需要与射频有关的系统设计软件,以支持具有射频前端元件详细分析的雷达仿真,包括非线性射频链路、高级天线设计以及信道建模。在雷达原型机进行昂贵地建造与测试之前,电路与电磁(EM)分析的协同仿真提供了真实系统性能的准确描述。
NI AWR设计环境平台集成了这些关键的雷达技术,为辅助要处理与ADAS电子有关的及其复杂的物理层和电气设计数据的工程设计团队提供必要的自动化。ADAS支持包括:
.雷达系统的波形设计、基带信号处理和参数估计,具有雷达测量的特殊分析,也具有射频元件和信号处理的综合行为模型。
.收发信机射频/微波前端的设计,具有针对印制板(PCB)和单片微波IC(MMIC)/RFIC设计的电路级分析和建模(分布传输线、有源和无源器件)。
.平面/3D 电磁分析,用于描述天线和天线阵列、无源结构、复杂互连以及外壳的电气行为。
.仿真软件和测试仪表的互联。
雷达结构和调制类型
对于自适应巡航控制(ACC),为了处理高速公路上的多目标场景,目标测距和速度测量要同时进行,要求既有高分辨率又有准确性。目前的ACC系统使用相对熟悉的波形,具有较长测量时间(5-100ms)。与之相比,未来针对安全应用的开发,如避免碰撞(CA)或自动驾驶(AD),要求具有更高的可靠性(极低的虚警率)和极快的反应时间。
对汽车雷达系统的重要要求包括:ACC的最大探测范围近似为200m,测距精度大约1m,速度分辨率2.5km/h。为满足这些系统要求,已实现了各种波形调制技术和结构,包括连续波(CW)发射信号或经典的具有超窄脉宽的脉冲波形。
对于固定的高分辨率测距系统而言,与脉冲波形相比CW雷达系统的主要优点是测量时间相对较低和计算复杂。文献中常见的两类CW波形包括线性频率调制(LFMCW)和移频键控(FSK),移频键控技术至少使用两种不同的离散频率。表1比较了不同雷达结构及其优缺点。
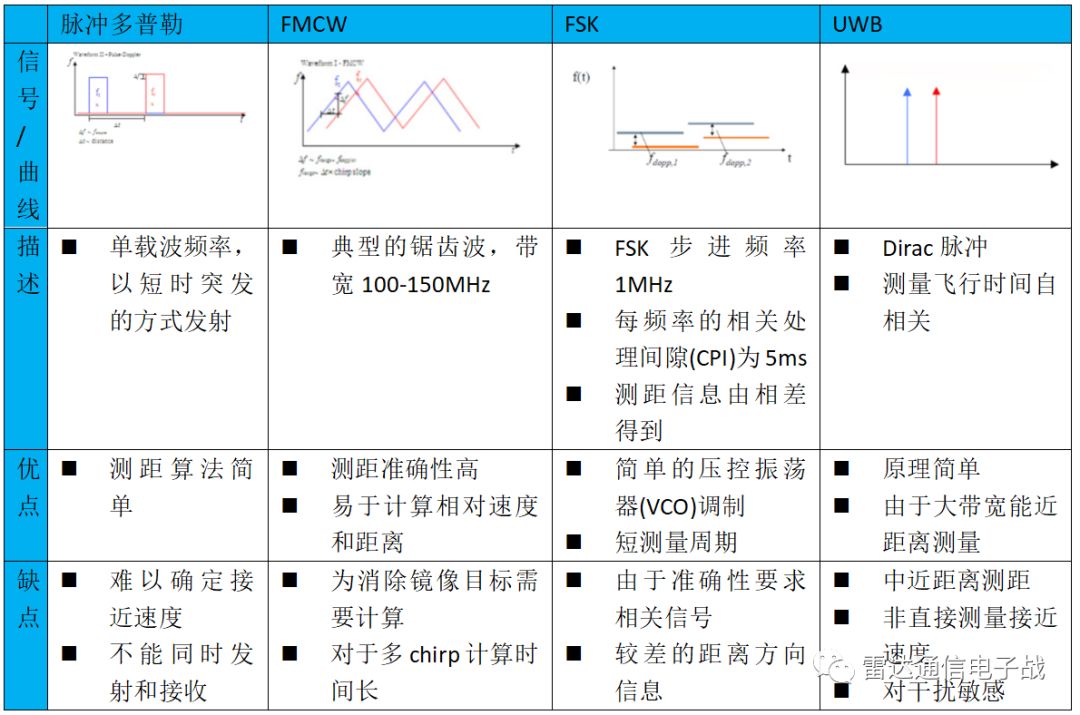
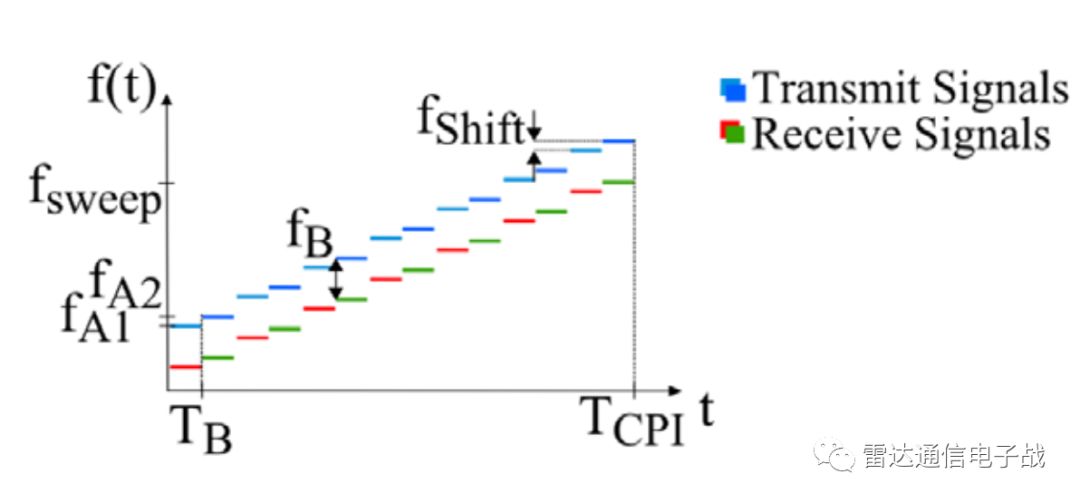
对于ACC应用,同时进行测距和相对速度的测量极其重要。LFMCW和FSK可满足这些要求。LFMCW需要多个测量周期和数学计算以解决模糊性,而FSK测距精度则差了点。结果,一种将LFMCW和FSK结合在一起称为多频移键控(MFSK)的单波形信号令人们极其感兴趣。
MFSK是专为汽车应用雷达开发的,包含两个或更多具有交替频移以及一定带宽和持续时间的发射频率,如图2[1]所示。
如前所述,脉冲雷达也被广泛应用于汽车雷达系统。相对速度的确定可以用相关发射机和接收机测量包含多普勒频移的脉冲之间相位变化来获取。对于多普勒(PD)雷达,测距仍然依靠信号的传播时间。为了同时进行测距和相对速度的测量,脉冲重复频率是一个重要的参数。
VSS软件专用于RF系统设计
VSS软件是一种射频、无线通信和雷达设计的解决方案,提供为准确描述当今先进的雷达系统信号产生、发射、天线、T/R开关、杂散、噪声、干扰、接收、信号处理和信道模型设计挑战和分析需求所必须的射频和数字信号处理(DSP)部件的仿真和详细建模。
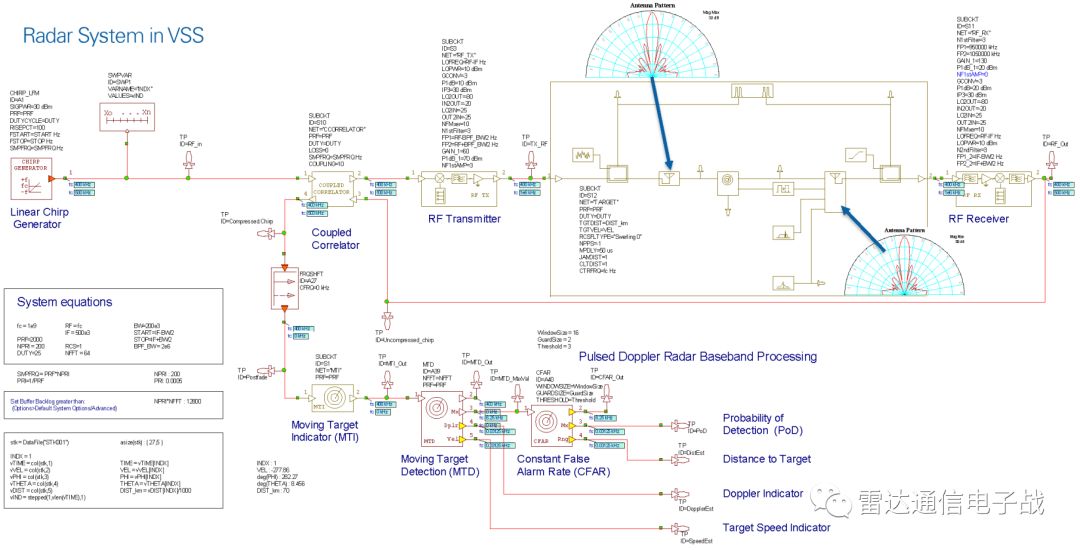
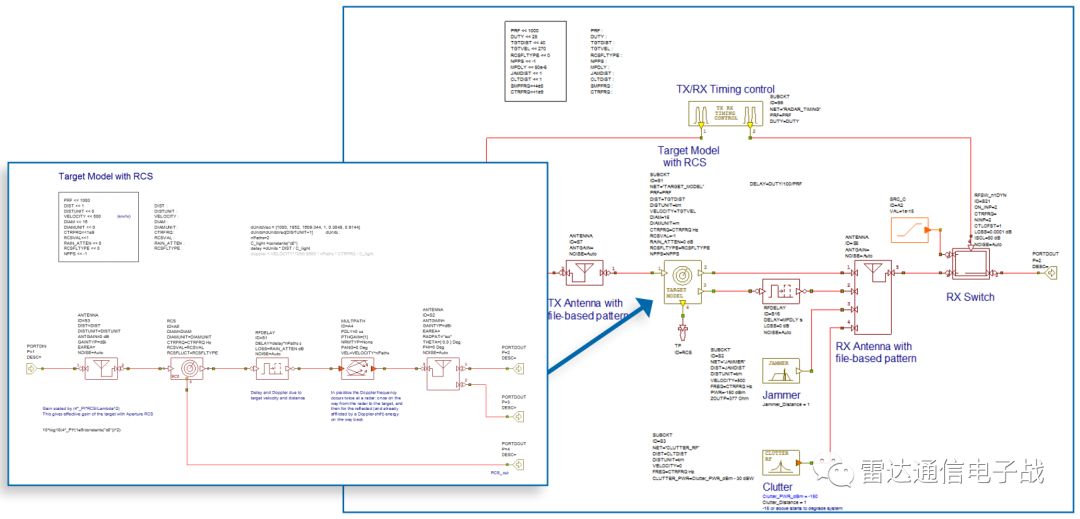
图3给出了一种可行的ACC雷达结构、调制框图、信道建模和测量配置的VSS工作空间示例。该工作空间包含多普勒(PD)雷达系统设计,具有用于仿真的信号产生、射频发射、天线、杂散、射频接收、动目标检测(MTD)、恒虚警(CFAR)处理器、信号检测等。
Chirp信号的电平为0dbm,PRF=2kHz,占空比25%。目标模型根据多普勒频率偏移和目标距离定义,到达角(THETA/PHI)根据数据文件规定,随着时间变化,产生多普勒频率和信道延迟以描述不同速度和距离的目标反射信号。可以包含雷达杂散模型,其功率谱密度形状也可以改变。在本例中,杂散的幅度分布设为瑞利型,杂散的功率谱设为Weilbull概率分布。
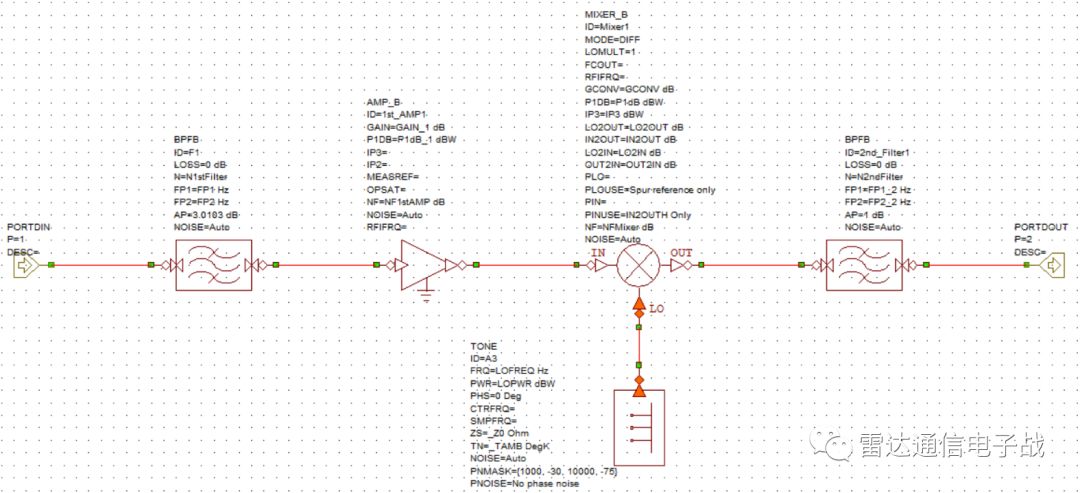
图4中的射频发射机包括振荡器、混频器以及滤波器,其增益、带宽和载频基于系统的要求或射频团队提供的实际硬件性能进行设定。同样,射频接收机包括振荡器、混频器、放大器和滤波器,其增益、带宽和载频基于系统的要求进行设定。
为了更有效检测运动目标,使用了MTD。MTD基于PD雷达的高性能信号处理算法。一组多普勒滤波器或FFT算子覆盖了所有可能期望的多普勒频移,而且在CFAR处理中使用了MTD的输出。在本特例中,提供了检测率的测量和CFAR。
雷达信号波形必须在时域在接收机输入端进行测量。因为目标返回信号通常受杂散、干扰或噪声的影响,在时域进行检测是不可行的。MTD用来在频域实现多普勒和距离检测。在MTD模型中,与目标测距和多普勒频率相应的数据被集中起来。然后,使用CFAR处理器基于检测和虚警概率设置判决门限,如图5所示。
这种相对简单的设计可用作不同PD应用的模板。雷达信号是脉冲重复频率(PRF)、功率和脉宽(占空比)的函数。这些参数可以根据不同的情形进行改变。在仿真中,雷达信号可以被任何通过数据文件读入器定义的信号替换。
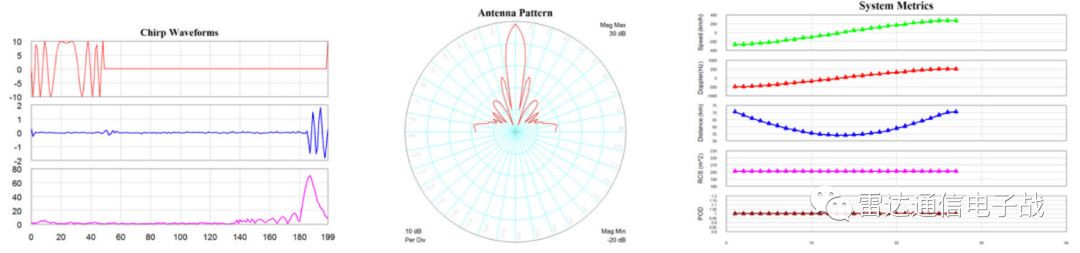
图6示出了几种仿真结果曲线,包括发射和接收chirp波形、天线方向图和几种系统测量,如相对速度和距离。在仿真中,到目标的距离扫描反映了接近并经过静止雷达的汽车导致多普勒频率从负值变为正值(红色曲线),在目标经过雷达时相对距离为0。在用于ACC的汽车雷达中,速度和距离信息用于警告驾驶员或采取纠正的动作(例如刹车)
多波束
典型ACC启停系统需要多个近程和远程雷达传感器检测周围的车辆。较短的测距雷达一般覆盖到60m,角度覆盖达±45°,允许检测可能并入当前车道的相邻车道。较远的测距雷达覆盖到250m,角度±5°到±10°,以检测同一车道的前方更远的车辆。
为支持多范围测距和角度扫描,模块制造商如Bosch、DENSO和Delphi开发并将多范围、多探测功能集成进能力增强、成本敏感的传感器,使用了多通道发射机(TX)/接收机(RX)结构。这些不同的范围可以采用多波束/多范围雷达利用诸如FMCW、天线阵列设计的数字波束成形等雷达技术来实现。
天线
基于FMCW雷达驱动多天线阵列的ACC系统多模型雷达如下图所示。这种具有数字波束成形的多波束、多范围雷达同时工作在24GHz和77GHz,利用两个开关阵列天线实现长距离测距和窄角度覆盖(150m,±10°)、短距离测距和宽角度覆盖(60m,±30°)。
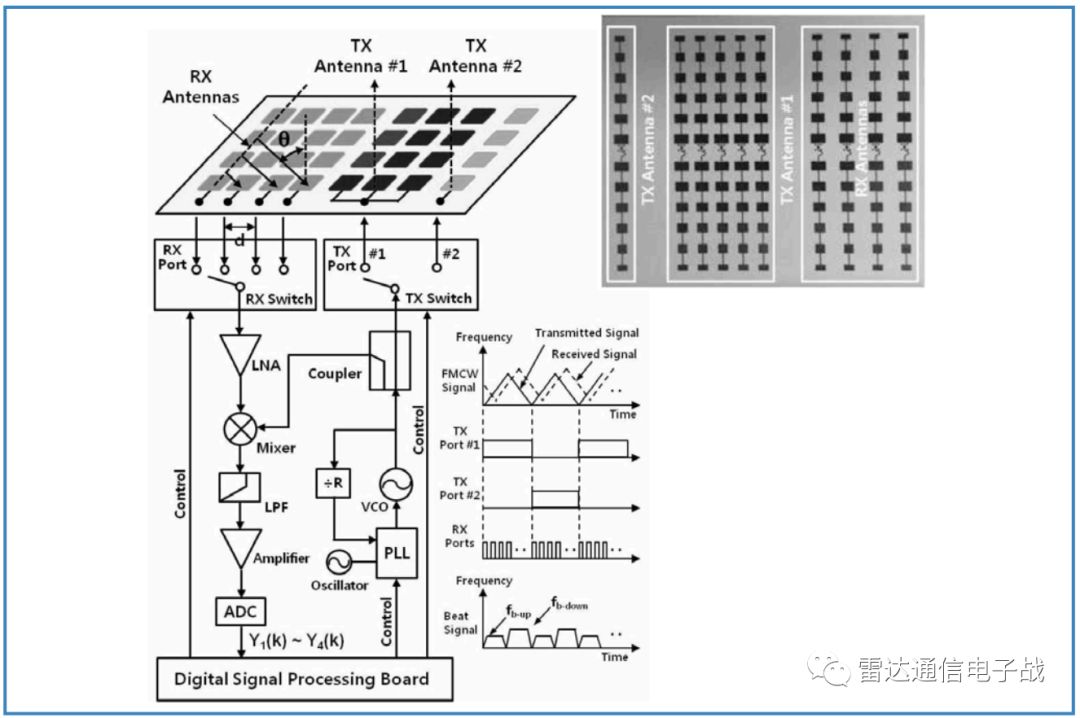
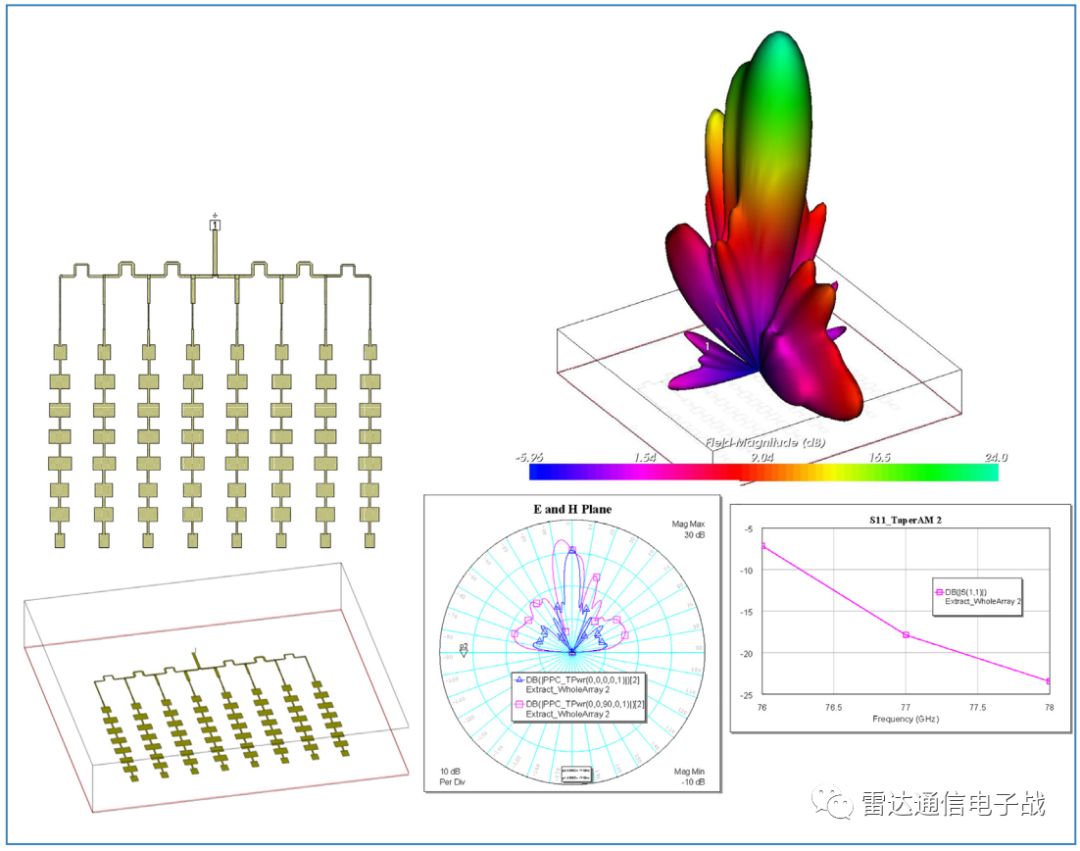
本例说明了多个天线阵列系统的使用,用于这类系统需要的接收机中,这些阵列包括长距离窄角度检测(77GHz)的多个(5X12单元)串行馈电的贴片阵列(SFPA)和用于短距离、宽角度检测的单个SFPA(为24GHz设计的1X12单元)和四个(1X12)SFPA。
雷达性能受天线技术的影响极大,必须考虑特定应用的增益、波束宽度、范围和物理尺寸。在本示例雷达中的多个固定TR/RX天线阵列对于范围、角度和副瓣抑制进行了优化。贴片天线相对易于设计与制造,在装配到阵列中的性能也很好,使总增益和指向性增加。
矩形贴片天线设计的性能受天线的长、宽、电介质厚度和介电常数的影响。单个贴片的长度控制了谐振频率,而宽度控制了输入阻抗和辐射方向图。增加宽度会减小阻抗。然而,将阻抗减小到50欧姆通常需要非常宽的贴片天线,这会占用许多宝贵的空间。
较大的宽度也可增加带宽,基底的高度较大也可增加带宽。较低的基底介电常数数值控制了边缘场,导致较宽的边缘,因此能得到较好的辐射。减小介电常数也会增加天线的带宽。较低的介电常数值也会增加效率。
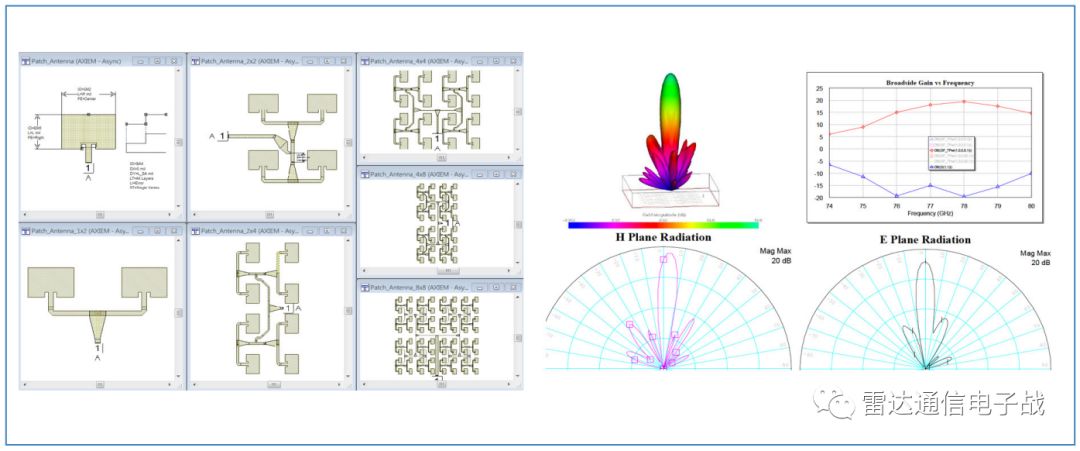
设计单个贴片天线或阵列,可以使用设计软件利用EM分析准确仿真和优化性能。NIAWR设计环境平台包括AXIEM 3D平面和AnalystTM 3D有限元方法(FEM) EM仿真器。这些仿真器不仅仿真天线的近场、远场辐射方向图、输入阻抗和表面电流等性能,也能直接与VSS软件协同仿真,自动将天线仿真结果并入到总雷达系统分析中,不需要在EM仿真器和系统设计工具之间手动输出/输入数据。
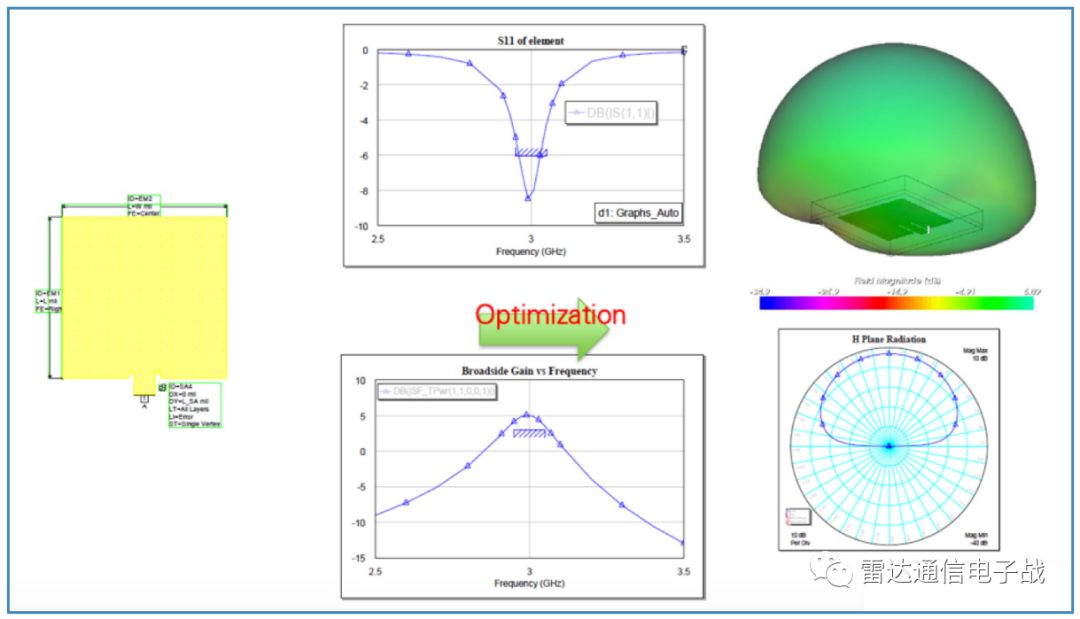
AXIEM和Analyst仿真器都能输入用户定义的天线物理属性如贴片宽度、长度以及电介质的属性如材质和基底厚度,生成电气响应。AXIEM仿真器特别适合于贴片天线分析(如上图),而Analyst仿真器最适合于3D结构如同轴馈线结构或有限介质(当近似为PCB边缘时会影响天线的性能)的建模。下图给出了结合有馈线的贴片天线阵列。
为了确定产生所需要电气响应的物理属性,天线设计者可使用AntSynTM天线分析和优化模块。AntSynTM软件使用户能规定天线的电气要求和物理尺寸约束,软件探索设计配置的集合,基于专用的遗传优化和EM分析确定最优结构。
生成的天线几何尺寸可以被导入专用的平面或3D EM仿真器如AXIEM或Analyst仿真器,用于验证或进一步分析/优化。
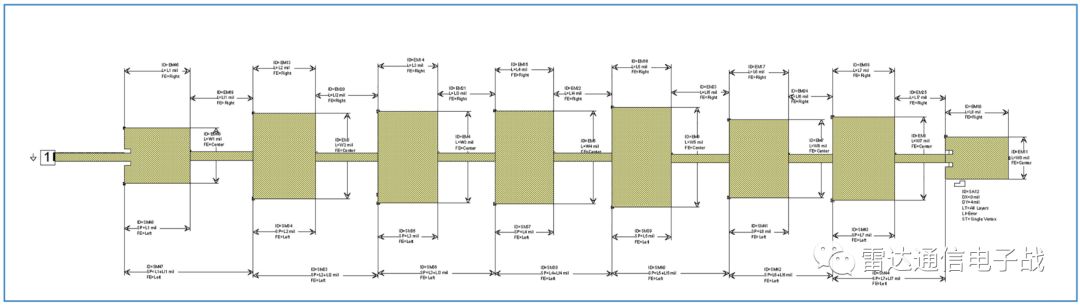
可以将简单的单元如微带贴片组合起来很容易地构成平面单元阵列结构。贴片可以串联配置成上图所示的1x8贴片阵列,每个单元通过传输线“可调”部分串联连接。在该AXIEM项目中,每个阵列单元的长度和宽度以及连接的传输线可以用变量来定义,允许对总体阵列性能优化。
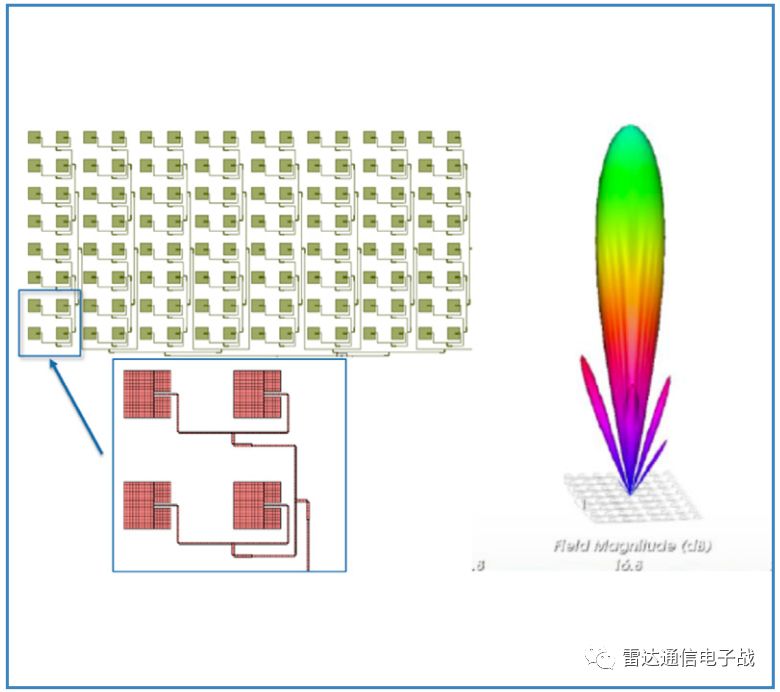
1x8阵列可以进一步扩展为8x8的高增益固定波束阵列,如下图所示,为[2]所报道的8x8阵列的复制。(7GHz 8x8阵列,具有N*λ/2馈电,λ/2<间距<λ)
在VSS软件内,阵列可以用专用相控阵模型表述为系统行为模块,使设计者能规定阵列结构(单元数、单元间距、天线方向图、受损的单元、增益渐变等等),用于所需要性能如增益和副瓣等阵列需求的高级别理解。对于天线阵列团队来说,对于大规模阵列(上千个单元)和开发基本需求的系统设计者,这种方法是最佳的。
也可以用AXIEM或Analyst仿真器进行详细的物理层阵列建模。在AXIEM或Analyst仿真器中,可以指定独立的馈电端口,如果是馈电网络,也可以指定单馈电网络(图:8x8贴片阵列的仿真,近似为2.3x2.5cm)
这一方法使设计团队能研究波束角度和每个独立单元的输入阻抗之间的相互关系,允许射频前端元件设计者考虑对收发信机性能的阻抗负载效应影响。这一能力突显了具有射频电路、系统和EM协同仿真的重要性,以在制造这些复杂系统之前准确研究电路/天线行为。
MIMO和波束控制天线技术
对于汽车,雷达会接收到不想要的来自地面以及环境中任何较大静止物体的后向杂散,如建筑物和护栏的侧面。除了直接路径反射,散射体之间还存在着多径反射。通过使用多输入多输出(MIMO)天线可减轻杂散的影响。
MIMO雷达系统使用多天线系统,每个发射天线独立于其他发射天线辐射任意波形。每个接收天线都可以接收这些信号。由于不同的波形,回波信号可以重新分配给单个发射机。
N个发射机天线的场和K接收机的场数学上合成为一个虚拟的K*N单元的场,形成一个较大的虚拟孔径,使设计者可减少必要的的阵列单元数目。因此,MIMO雷达系统提高了空间分辨率,极大提高了对干扰的抑制。通过提高信噪比,目标检测概率也增加了。
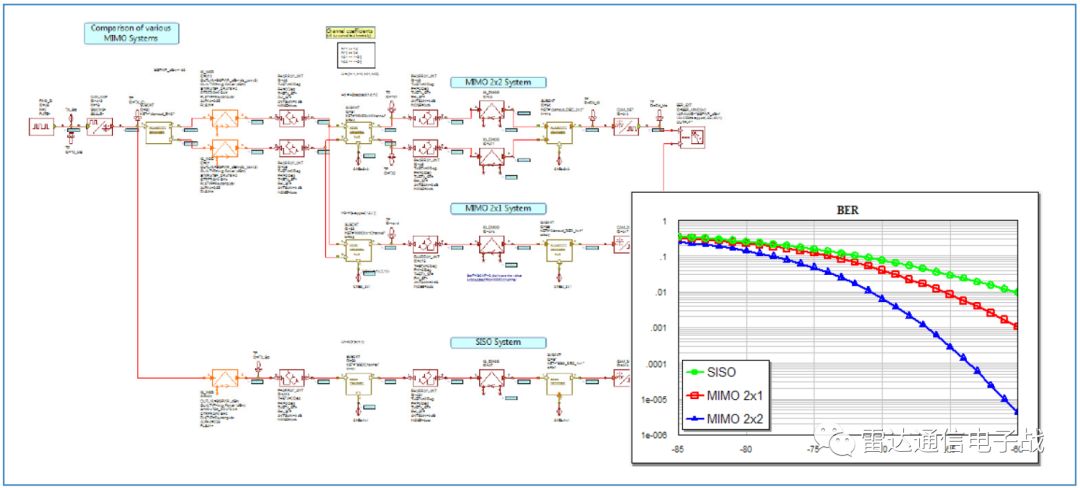
VSS软件能实现用户规定的MIMO算法,评估与具体信道模型相关联的总体性能。这种信道模型可以仿真高度定制的多径衰落信道,包括信道路径损耗、收发信机之间的相对速度、最大多普勒扩散。支持独立的或连续的块与块之间的操作,信道可以包含多种路径(LOS、瑞利、莱斯、频移),可以根据其衰落的类型、延迟、相对增益和其他应用特征独立地配置。
该模块也可以仿真用户定义几何尺寸的接收机天线,使其能仿真单输入多输出(SIMO)系统,如上图所示。
总结
本应用示例讨论了ADAS设计面临的挑战,通过例子阐述了VSS软件的雷达设计能力如何帮助设计者克服这些障碍。在车辆中ADAS越来越普及,不断地研究与开发使其更复杂、可靠性更高。类似NI AWR设计环境平台这种仿真技术的进步,特别是对射频敏感的电路设计、阵列建模和系统级协同仿真,使天线设计者和系统集成者可优化这些系统,以达到挑战性的尺寸、成本和可靠性目标。
审核编辑:郭婷
-
NI
+关注
关注
19文章
1123浏览量
100303 -
adas
+关注
关注
309文章
2183浏览量
208626 -
智能汽车
+关注
关注
30文章
2843浏览量
107242
原文标题:基于FMCW的毫米波雷达及天线系统
文章出处:【微信号:雷达通信电子战,微信公众号:雷达通信电子战】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AWR1642参考时钟使用单端晶振,手册中的DC-Vih指的是输入高电平判决门限,还是输入信号的最大值?
AWR2243评估模块(AWR2243BOOST)毫米波检测解决方案

康谋分享 | AD/ADAS的性能概览:在AD/ADAS的开发与验证中“大海捞针”!

基于AWR2944的汽车雷达DDMA波形的原理和实现
康谋分享 | 直面AD/ADAS快速开发挑战:IVEX自动驾驶场景管理及分析平台!


AWR6443、AWR6843 单芯片 60GHz 至 64GHz 毫米波传感器数据表
如何在不同应用场景下构建音频测试环境






 工商网监
工商网监
评论