 用于大功率机器视觉闪光灯的LED驱动器
用于大功率机器视觉闪光灯的LED驱动器
作者:Keith Szolusha and Kyle Lawrence
机器视觉系统使用非常短的强光闪光来生成用于各种数据处理应用的高速图像。例如,快速移动的传送带通过机器视觉系统运行,用于快速标签和缺陷检查。红外和激光LED闪光灯通常用于接近和运动感应机器视觉。安全系统发出高速、难以检测的 LED 闪光灯,以感应运动并捕获和存储安全录像。
所有这些系统面临的一个挑战是产生非常高的电流和短期(微秒)LED相机闪光波形,这些波形可以分布在很长一段时间内,例如100 ms到1 s以上。创建由长时间分隔的短方形LED闪光波形并非易事。随着LED(或LED串)的驱动电流上升到1 A以上,LED导通时间缩短至微秒,挑战也随之增加。许多具有高速PWM功能的LED驱动器可能无法在短时间内有效地处理长关断时间和大电流,而不会降低适当的高速图像处理所需的方形波形。
专有 LED 闪光灯
幸运的是,LT3932高速LED驱动器可以为高达2 A LED灯串提供机器视觉相机闪光灯,即使关断时间较长,如1秒、1小时、1天或更长时间。LT3932 的特殊相机闪光灯功能使其能够保持输出电容器和控制环路充电状态,即使在长关断时间内也是如此。在对输出和控制环路电容器的状态进行采样之后,LT3932 在较长的关断时间内继续对这些组件进行涓流充电,以补偿典型的漏电流,而其他 LED 驱动器没有考虑到这一点。
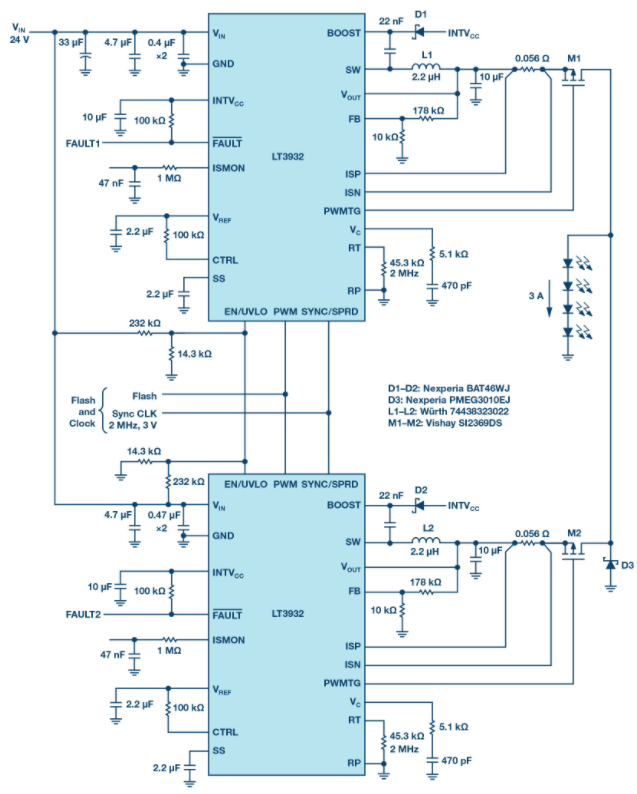
LT3932 的专有闪存技术可在驱动器并联以增加 LED 闪光灯电流时纵向扩展。保持所需的闪光形状和完整性。图1显示了3 A相机闪光灯并联两个驱动器是多么容易——最高可达4 A的设计。
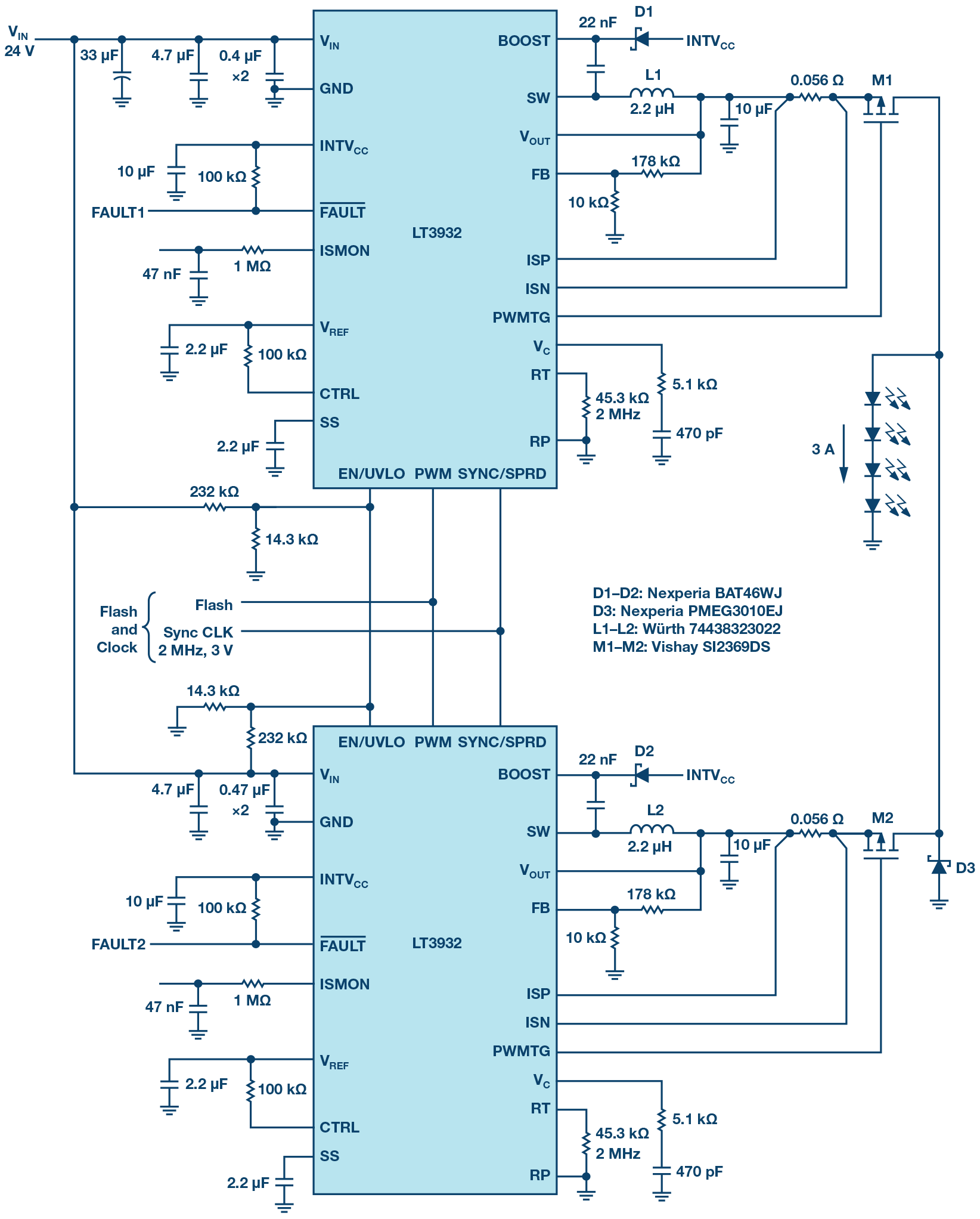
图1.并行LT3932 1.5 A LED驱动器可产生3 A机器视觉LED脉冲,相对于标准PWM调光频率具有较长的关断时间。
机器视觉系统的LED闪光灯要求远远超过标准PWM调光驱动器所能满足的要求。也就是说,大多数高端LED驱动器设计用于在至少100 Hz的PWM频率下产生PWM调光亮度控制。这是因为人眼可以将较低的频率感知为恼人的闪烁或频闪,即使LED波形是方形且可重复的。在 100 Hz 时,理论最大关断时间约为 10 ms。在10 ms关断时间内,如果设计正确,LED驱动器损失的输出电容电荷最小,使其能够以与结束最后一个PWM ON脉冲大致相同的状态启动其控制环路。电感电流和下一个 LED PWM ON 脉冲的快速响应和斜坡上升可以快速且可重复,并最大限度地减少启动时间。较长的关断时间(频率低于 100 Hz)可能会因泄漏而导致输出电容器电荷损失,从而阻止 LED 重新打开时的快速响应。
用于更高电流的并联 LED 驱动器
LED驱动器充当电流源,调节通过发光二极管发出的电流。由于电流仅沿单个方向流向输出,因此多个LED驱动器可以并联放置,并且它们的电流通过负载相加。不需要保护电流源免受电流反向流过一个转换器或输出不匹配的影响。另一方面,稳压器本身并不擅长均流。如果它们都试图将输出电压调节到一个点,并且它们的反馈网络略有不同,则稳压器可能会消耗反向电流。
LED 驱动器保持其输出电流,而不考虑可能提供输出负载总和的额外电流的其他驱动器。这使得并联LED驱动器变得非常简单。例如,图1所示的两个并联LT3932 LED驱动器的LED闪光灯系统以3 A电流高效驱动4个LED,10 μs短脉冲按机器视觉系统定义。每个 LT3932 转换器在 PWM 导通时间内提供总串电流的一半,并在 PWM 关断时间期间关断并保存其输出状态。关断时间可短可长,对闪光波形的可重复性没有影响。
在长关断时间内,并行相机闪光灯应用与单个转换器具有几乎相同的简单性。转换器在最后一个PWM导通脉冲结束时观察共享输出电压,并保持输出电容充电至该状态,即使在长关断时间内也是如此。每个转换器将其PWM MOSFET与共享负载断开,并通过在输出电容泄漏能量时向该电容提供电流,使其输出电容充电至大约最后一个电压状态。这些电容器在长关断时间内遇到的任何泄漏都可以通过少量的维护电流来克服。当下一个PWM导通脉冲启动时,每个转换器的PWM MOSFET导通,输出电容以与最后一个脉冲大致相同的状态启动,无论10 ms过去了还是一整天。
图2(a)和2(b)显示了LT3932并行LED驱动器以10 μs机器视觉相机脉冲在3 A电流下驱动4个LED。无论 10 ms PWM 关断时间 (100 Hz) 还是 1 s PWM 关断时间 (1 Hz),LED 脉冲都锐利而快速,非常适合机器视觉系统。
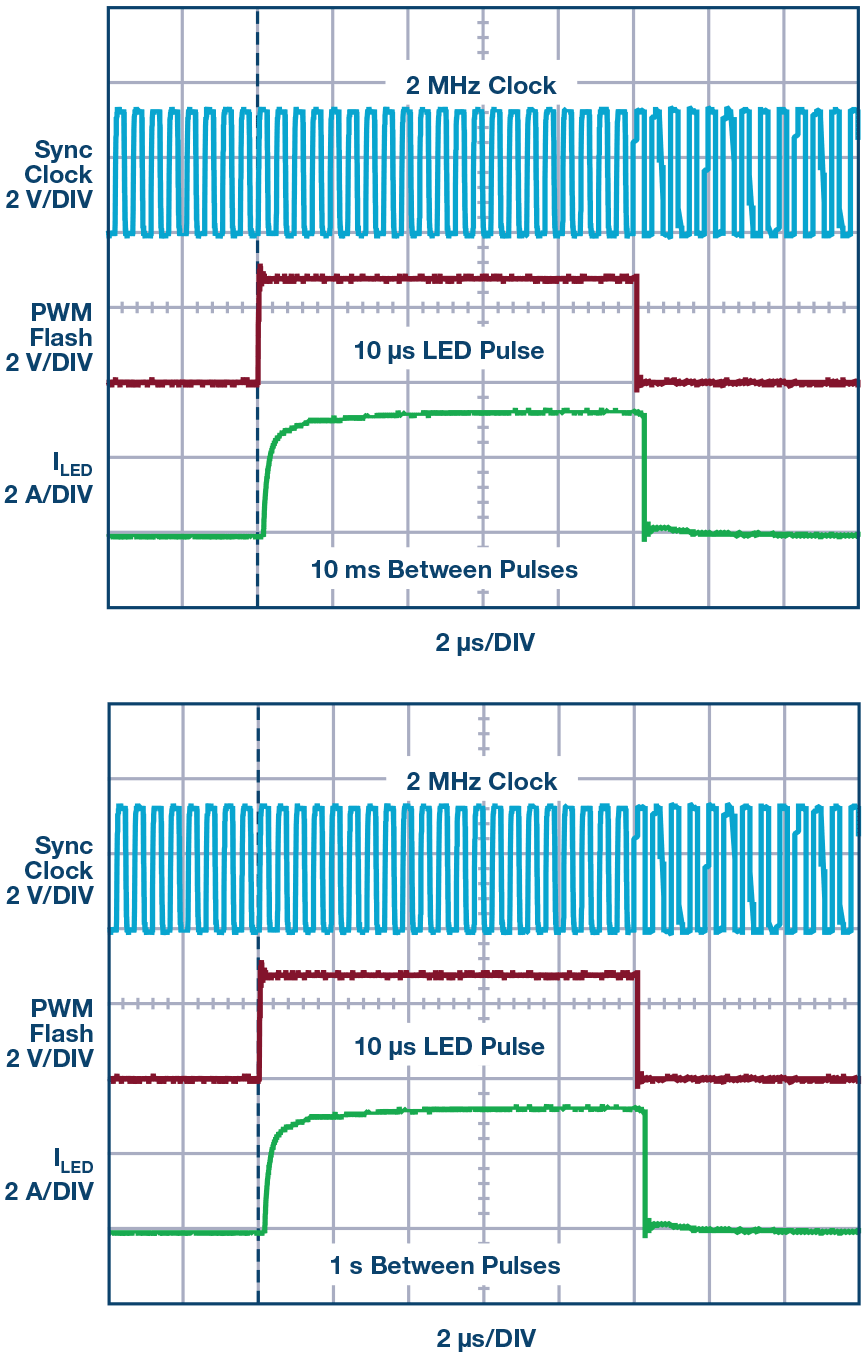
图2.3 图1的并行LED驱动器的相机闪光波形看起来相同,无论PWM关断时间长短如何。波形显示,(a)10 ms之后的10 μs脉冲和(b)1秒后的10 μs脉冲是相同的。LT3932 LED 闪光灯在一天或更长时间的 PWM 关断时间后看起来也是一样的。
甚至可以实现更高的电流
并联LED驱动器不限于两个转换器。三个或更多转换器可以并联,以产生具有锋利边缘的更高电流波形。由于该系统没有主器件或从器件,因此所有转换器都提供相同的电流并平均分担负载。建议所有并行LED驱动器转换器共享相同的同步时钟并保持同相。这确保了所有转换器在其输出电容的纹波上具有大致相同的相位,以便纹波电流不会倒流或在不同转换器之间流动。PWM脉冲波形必须与2 MHz同步时钟保持同相。这可确保LED闪光波形保持方形且无抖动,从而产生最佳的图像处理效果。
LT3932演示电路(DC2286A)设计用于驱动1 A的LED电流通过一个或两个LED,作为降压型LED驱动器。如图1所示,它可以很容易地改变和并联,以实现更高的电流、更高的电压或并联操作。图4显示了如何将其中两个电路轻松连接在一起,从24 V输入通过4个LED驱动10 μs、3 A脉冲。出于测试目的,脉冲发生器可用于同步时钟信号,如图4所示。在生产机器视觉系统中,时钟芯片可用于生成同步和PWM脉冲。对于更高电流的脉冲,使用相同的并联方案添加更多演示电路DC2286A转换器。
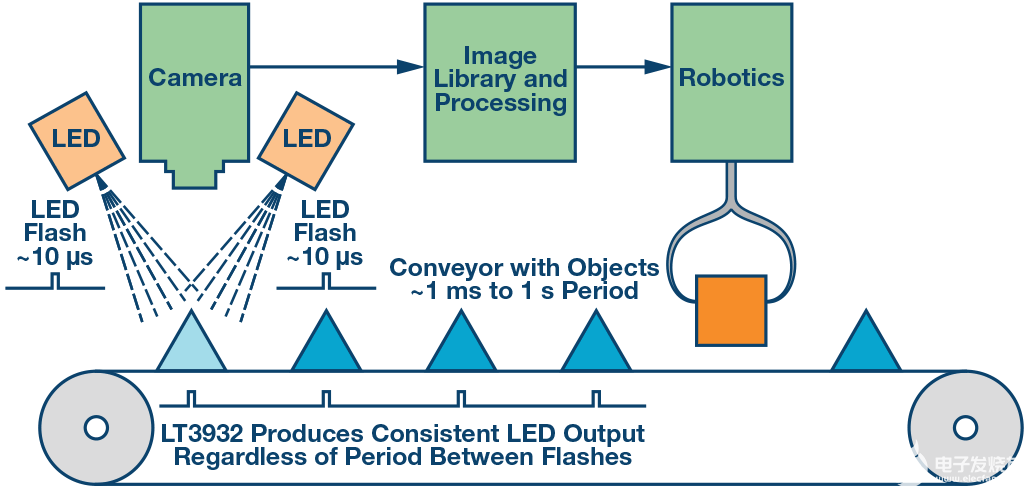
图3.工业传送带上的机器视觉示例。检测系统以许多不同的速度移动,但闪蒸技术必须快速而清晰。
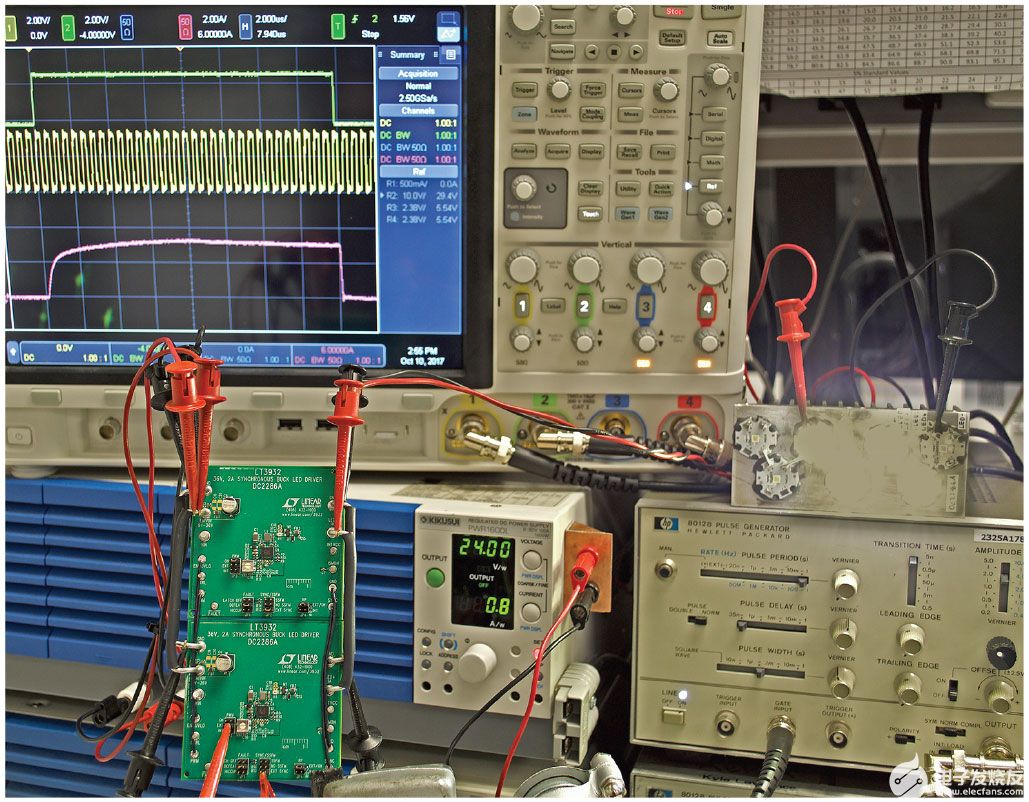
图4.两个DC2286A LT3932演示电路可轻松并联,以创建图1所示的3 A至4 A机器视觉LED闪光灯应用。
结论
机器视觉系统可以使用并行 LED 驱动器来创建自动图像处理所需的快速、方形、高电流波形。LT3932 LED 驱动器的专有相机闪光灯技术可通过连接并联转换器扩展到更高的电流。并联 LT3932 转换器可实现 3 A 和更高几微秒级的脉冲,即使关断时间较长也是如此。无论LED闪光灯之间的关闭时间有多长,LED相机闪光波形都保持方形且无抖动。
审核编辑:郭婷
-
驱动器
+关注
关注
52文章
8226浏览量
146245 -
led驱动器
+关注
关注
12文章
1128浏览量
72805 -
机器视觉
+关注
关注
161文章
4369浏览量
120275
发布评论请先 登录
相关推荐
5个灯的LED闪光灯驱动器电路,5 Lamp/LED Fla
基于LTC3453的LED闪光灯驱动器设计
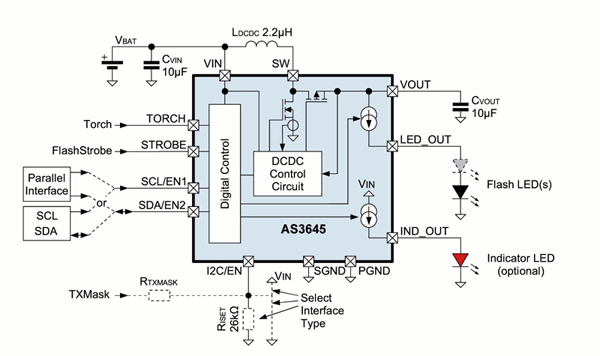
LED闪光驱动器ADP1653资料
闪光灯LED驱动器的设计原理及特性


用于高功率机器视觉闪光灯的LED驱动器LT3932简介





 工商网监
工商网监
评论