 组件增益推动下一代协作机器人
组件增益推动下一代协作机器人
几十年来,机器人一直是制造业的一部分,但工业5.0的到来在大数据的推动下,正在帮助重组方程式,以支持机器人不仅增加而且灵活的自动化。当然,仍然需要关在笼子里的巨型机器人,它们可以在一分钟内将汽车保险杠捣碎,但它们更灵活、体积更小的表亲:协作机器人也是如此。协作机器人,简称为协作机器人,与更传统的机器人相比具有许多优势:它们可以快速重新编程以承担新任务,甚至可以在一天内完成。协作机器人与人类相处融洽,并能高效地与他们一起工作。通常情况下,协作机器人会承担重复和无聊的任务,从而让人类有时间从事更复杂的工作。最重要的是,协作机器人被认为具有成本效益,这意味着即使是中小型企业也能负担得起自动化。
协作机器人正在推动工业 5.0,即下一次工业革命。2018 年全球协作机器人市场价值 6.491 亿美元,预计到2025 年将以惊人的 44.5% 的复合年增长率增长。在这里,我们将讨论支持下一代协作机器人的一些组件。
协作机器人工业手臂
工业机器人手臂是机械手,有点像人类的手臂。它们的机械关节不是肌肉,而是由外部电源提供动力,通常是电动机。手臂负责繁重的工作,计算机软件充当大脑。视觉和运动检测系统帮助它感知物体并根据该信息采取行动。
接近感应
由于协作机器人没有笼子,它必须满足一定范围的安全条件。它必须在任务执行期间启用接近感应。这样,当员工靠得太近时,它就会知道强制执行安全停留。更复杂的视觉系统还可以监控人类向它们移动的速度,以便它们可以准时停止并在人类离开时继续。除了接近感应之外,它还应该允许员工使用标准的紧急停止 (E-stop) 按钮来覆盖其行为。
力感应
协作机器人还必须知道何时停止推动或在执行任务时施加多大的力。例如,与处理金属轴承的机器人相比,处理鸡蛋的拾放协作机器人需要施加不同的力。力感应是机械臂的一个重要方面,需要包含嵌入式传感器以相应地调整其响应。
在制造或其他应用中,机械臂配备了一系列臂端工具选项,从软夹具到真空吸盘,具体取决于所需的应用。
协作机器人组件
控制机械臂的计算机“大脑”必须能够时刻感知所有关节的当前角度位置。这是所有工业手臂(包括传统笼式机器人和协作机器人手臂)控制算法正常运行的基本要求。为了感知关节位置,这些机器人需要将专用传感器集成到关节电机中。对于机器人制造商而言,这些传感器是采购的关键组件。它们必须在机器人的整个工作寿命期间可靠地工作,即使关节因在工厂地面上加载而变热时也是如此。这些传感器的关键要求之一是能够适应非常狭窄的空间。每次重新设计手臂连杆时,都需要选择与之匹配的传感器。
TEConnectivity 的工业旋转变压器非常符合要求。它们是用于工业伺服电机的vwin 角度位置传感器。这些空心轴高精度旋转变压器更可靠,专为低空间要求而设计,允许用户定制和更大的灵活性。
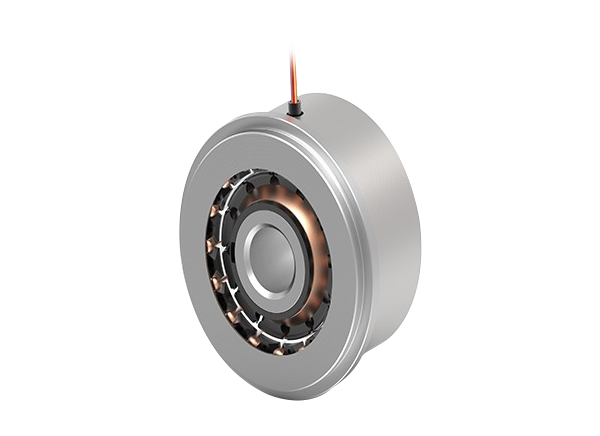
图 1:TE Connectivity 工业旋转变压器提供 360 度范围内的绝对角度信息,具体取决于版本。(来源:贸泽电子)
像所有工业机器人一样,协作机器人需要将电力可靠地输送到它们的电机。有许多用于连接控制信号、电力和电力电子元件的设计选项。在任何情况下,提供这种电源和信号的连接器都需要遵守工业标准,并能承受大量的机械扭曲和弯曲。线对板连接器将电线连接到印刷电路板 (PCB),从而实现电路之间的连接,是设计中要选择的关键部件。同样,一份通用的物料清单可能规定了一系列相关的连接器,这些连接器具有多种配置以进行混合和匹配。
TE Connectivity 的 ELCON 微型线对板电源解决方案在 3 毫米(触点间距)的常见工业足迹中提供高达每引脚 12.5A(最大值)的高电流密度。这种常见的行业足迹通过轻松升级现有设计为设计师和工程师提供了设计灵活性。
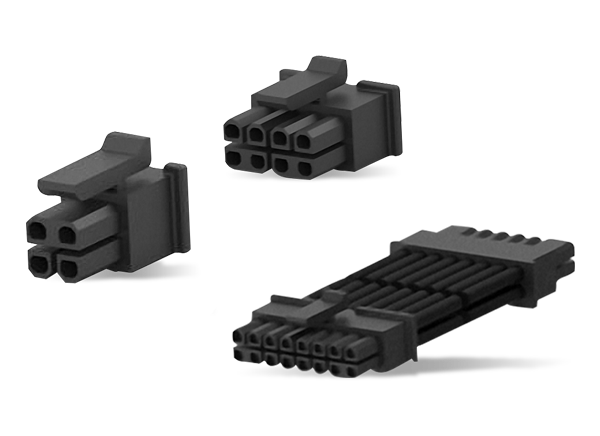
图 2:TE Connectivity ELCON 微型线对板电源解决方案支持 2 至 24 针配置和不同电流以及不同线径的多种组合。(来源:贸泽电子)
TE Connectivity 的此类组件可帮助企业设置协作机器人,以满足其特定的空间限制和编程需求。
结论
随着自动化程度的不断提高,协作机器人有望在加快其步伐方面发挥关键作用。下一次工业革命,即工业 5.0,已经到来。协作机器人可以在装配线、零件组装、驱动螺丝、抛光、检查和其他日常任务中执行拾取和放置任务。
随着先进的计算机视觉和传感功能的引领,驱动这些协作机器人的技术也变得越来越复杂。随着协作机器人越来越多地被要求以更少的成本做更多的事情,他们将需要类似于 TE Connectivity 的组件来构建下一代协作机器人。
审核编辑黄昊宇
- 机器人
+关注
关注
209文章
27751浏览量
203767
发布评论请先登录
相关推荐
TE Connectivity 赋能下一代服务机器人

TE无线连接,助力下一代服务机器人!
三星电子解散Bot Fit机器人业务团队
BlackBerry宣布与AMD合作革新下一代机器人系统
NVIDIA的专用AI平台如何推动下一代医疗健康行业的发展
PCB行业:用协作机器人,就选大族机器人
科聪协作科聪协作(复合)移动机器人整体解决方案

一文读懂:为什么碰撞检测是协作机器人的底层技术
交互的艺术:协作机器人如何定义新一代的人机关系?
华数机器布局工业协作机器人,发布多款工业协作机器人新品






 工商网监
工商网监
评论