 协作机器人:将机器肌肉与人类灵巧性相结合
协作机器人:将机器肌肉与人类灵巧性相结合
当人们第一次想象机器人时,他们想象的是机器人,它们看起来和动作都像人类,并且通过承担日常繁琐的工作来为凡人的主人服务。
例如,捷克作家 Karel Çapek(因从斯拉夫语词根“robota”中创造出“机器人”一词而闻名,意思是强迫劳动者)描绘了模仿人类并乐于在房子和花园周围奴役地做家务的机器人,在至少在一开始(后来在查佩克 1921 年的戏剧《Rossumovi Univerzální Roboti》(罗森的万能机器人)中,事情变得很糟糕)。
但直到现在,拟人化的“服务”机器人才开始发挥查佩克所设想的潜力。计算能力、人工智能(AI) 和机电学的最新进展已在应用中引入了商业服务机器人(例如,帮助发达国家的老龄化人口)。
工业(机器人)革命
在服务机器人出现之前,机器人技术的重大革命是由工业推动的。一旦电子产品和软件成熟到足以使技术变得实用且便宜,机器人就会在 20 世纪 70 年代被引入装配线,以研磨和抛光管接头、焊接汽车、给冰箱上漆或组装家具。在这些重复、精确、无差错操作必不可少的大批量应用中,机器人将人类牢牢地置于阴影之下。制造商采用了一种不需要舒适休息、病假、加薪或工会代表的技术。虽然工业机器人并不便宜,但它们确实提供了证明初始资本投资合理所需的多年可靠服务。
今天的工业机器人与科幻小说中的金属人相去甚远。国际标准化组织 (ISO) 将工业机器人定义为“一种自动控制、可重新编程、多用途机械手,可在三个或更多轴上进行编程,可以固定在原地或移动,用于工业自动化应用。” 换句话说,工业机器人是一种强大的巨型手臂,可以在工厂的家中使用,并且可以在大型操作范围内移动到需要快速、重复和精确地完成工作的地方。
工人和机器合作
但人类仍然在制造业中发挥着重要作用。他们在耐力、速度和精确度方面的不足,在灵活性、灵活性和解决问题的能力方面得到了弥补。在世界许多地方,他们的劳动力很便宜。这使得人们非常适合挑剔的组装,因为产品组合经常变化并且需要广泛的技能。
在机器人领域和人类领域之间存在一个区域,两者的才能可以显着提高制造生产力。该区的特点是产量相对较低,产品价值相对较高。通过自动化零件的拾取、提升和获取以及装配过程中重复的常规元素,引入机器人将大大提高生产率。
这不是汽车装配线的金属怪物的工作。一方面,它们的购买和运行成本太高,更重要的是,它们对人类来说就像顶级掠食者一样危险。让工人与工业机器人一起工作就像用动物园里的狮子来骑孩子一样——这是一场即将发生的灾难。
这就是为什么新型“友好”机器人正在填补这个空缺。这些机器被称为协作机器人(或简称为“cobots”),重量轻、与人规模相当、价格低廉,并且对同事有同理心。
协作机器人设计挑战
设计协作机器人很棘手:挑战不在于让它们执行各种流水线任务——这相当简单——但更多的是确保工人不会受伤。工程师必须将强度、速度和可重复性等操作参数与运动传感器、力限制器和流线型设计(以消除夹点等问题)等安全元素结合起来。内置传感器相对简单使协作机器人完全停止,如果人类工人进入操作范围,但在某些情况下,人和机器人必须相互作用——要求协作机器人的关节有一定程度的松弛度,这样它就不会撞到骨肉太硬。今天的工业机器人具有按照高规格制造的关节,可以精确地消除松弛,因为松弛会影响准确性;在放宽公差的同时保持这种精度需要新的设计技术。
这只是硬件。工业机器人需要经验丰富的技术人员对其进行编程。当一台机器需要非常少的更新来应对新的车身时,这并不是什么大不了的事情,在花费了数年的时间将以前的类型焊接在一起之后。相比之下,协作机器人需要很容易被人类同事“编程”,以应对新产品的频繁推出。编程操作应该尽可能简单,例如,在机器“学习”运动顺序的同时,手动引导机器人的手臂完成涂胶操作。但支持这种简单编程的潜在复杂性尚未完全开发。
设计协作机器人是一门新生学科,因此,几乎没有可借鉴的指导。协作机器人的国际安全标准与首批工作场所模型的推出同时进行。ISO 10218 标准为协作机器人提供了一些具体指南,而 ISO 15066 则概述了协作操作的一些规则。ISO 技术委员会 (TC) 184/SC 2(针对机器人和机器人设备)目前正在起草的技术规范 (TS) 是一份比国际标准低一级的文件,有望为机器人和机器人设备的知识体系增添更多内容协作机器人设计。
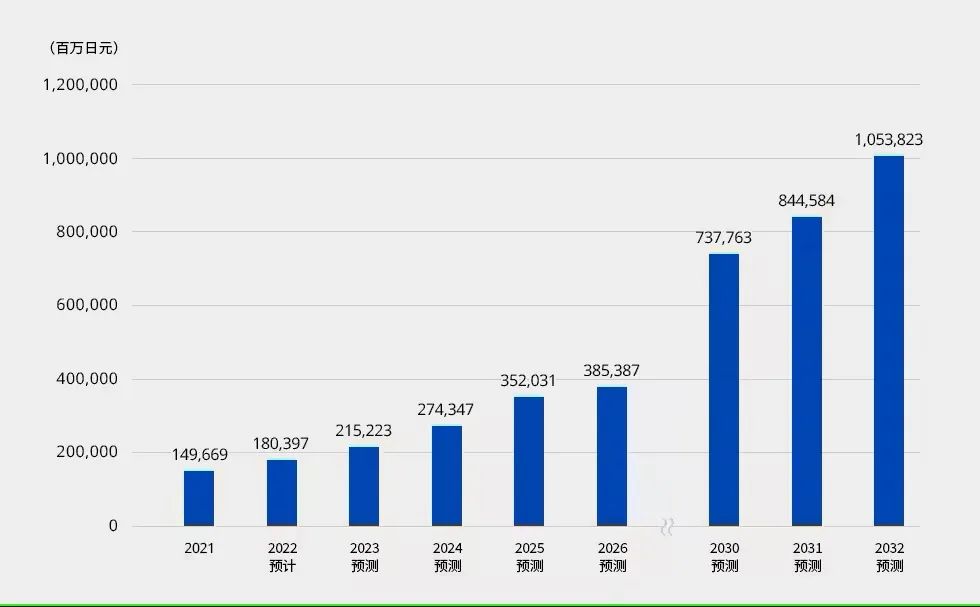
这个信息不会太快到来。协作机器人市场将在资本货物中占据巨大份额——正如巴克莱银行(一家总部位于英国的银行)的分析师估计,到 2025 年,该细分市场可能会从 2015 年的 1.16 亿美元增长到 115 亿美元。这大致相当于当今整个工业机器人市场。
审核编辑黄昊宇
- 机器人
+关注
关注
209文章
27720浏览量
203681
发布评论请先登录
相关推荐
3D打印“皮肤”助力机器人实现安全高效协同工作

什么是协作机器人?为什么使用协作机器人?
常见的工业机器人类型有哪些?
在工厂内外,机器人如何改善我们的世界
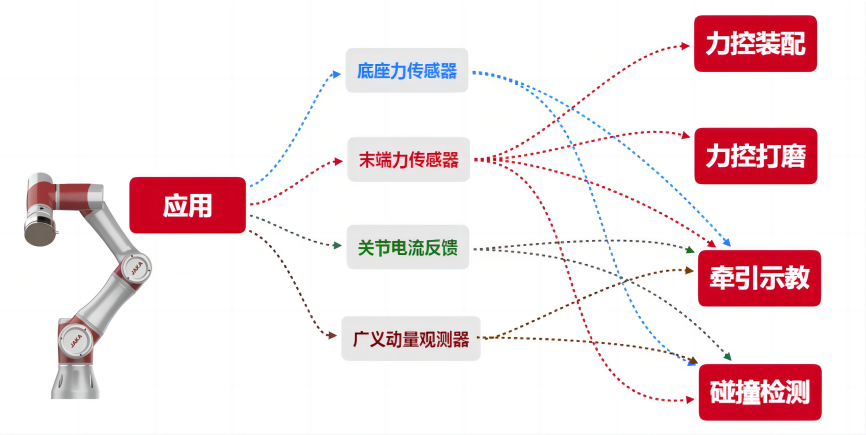
一文读懂:为什么碰撞检测是协作机器人的底层技术
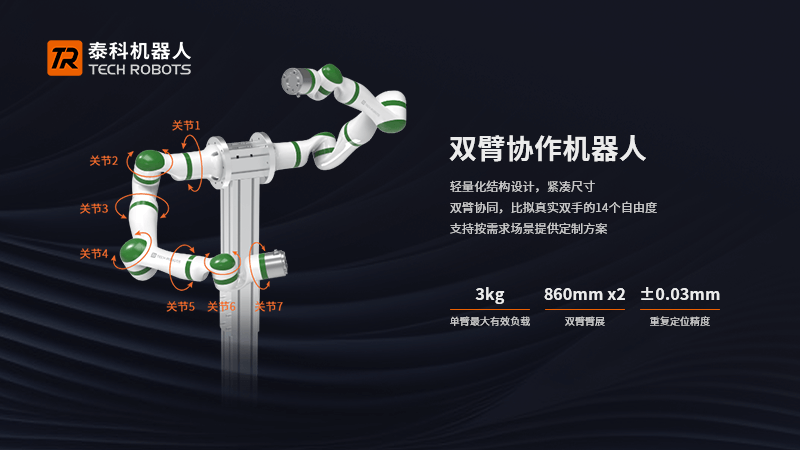
智慧医疗的新翼-双臂14轴协作机器人的崛起与应用
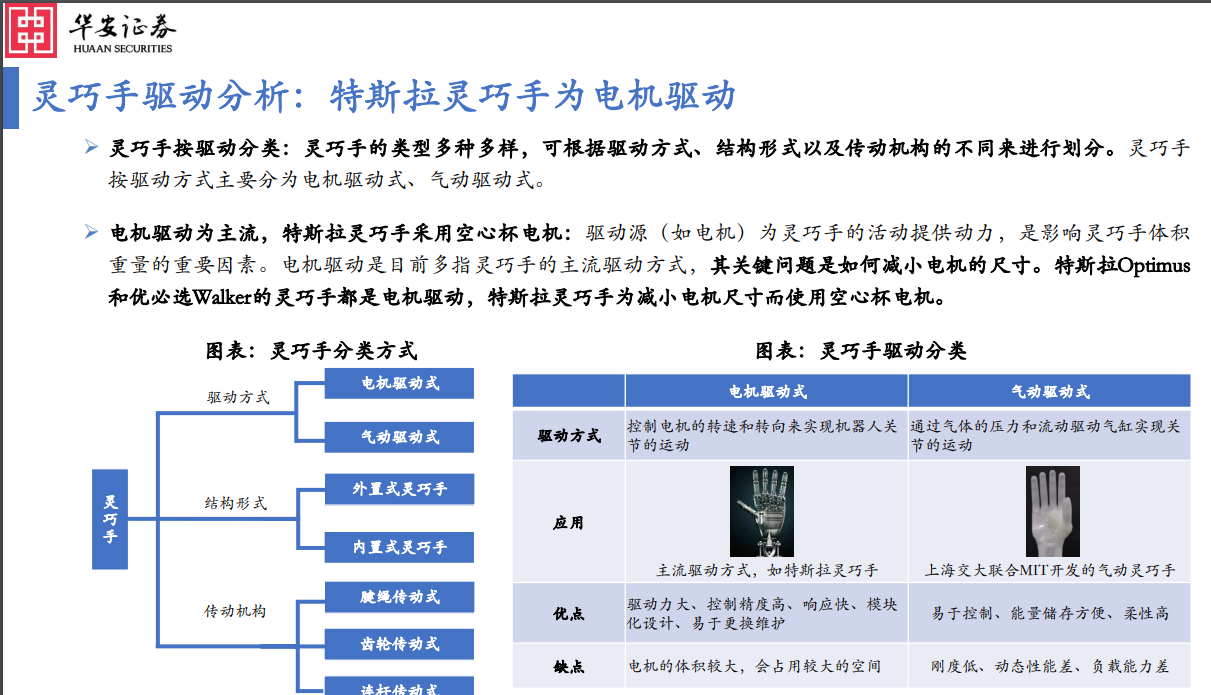
人形机器人崛起:灵巧手与空心杯电机市场的双重机遇
力控机器人是干什么的
以人为本的机器人将大大改变劳动现场
华数机器布局工业协作机器人,发布多款工业协作机器人新品






 工商网监
工商网监
评论