 一个关于三相Vienna拓扑技术知识(上)
一个关于三相Vienna拓扑技术知识(上)
一. 序言
最近这几年充电模块是热门,从最开始的7.5 kW、10 kW到后面的15 kW、20 kW,功率等级不断的提高。现在市场上的大功率充电模块绝大部分都是三相输入,PFC部分也基本都是采用的三相无中线Vienna结构的拓扑。结合Microchip的MCU和功率半导体,和大家分享一下。由于本人水平有限,也难免会有一些个人见解有误的地方,希望和大家一起探讨交流。
二. 主电路的组成
-
主拓扑
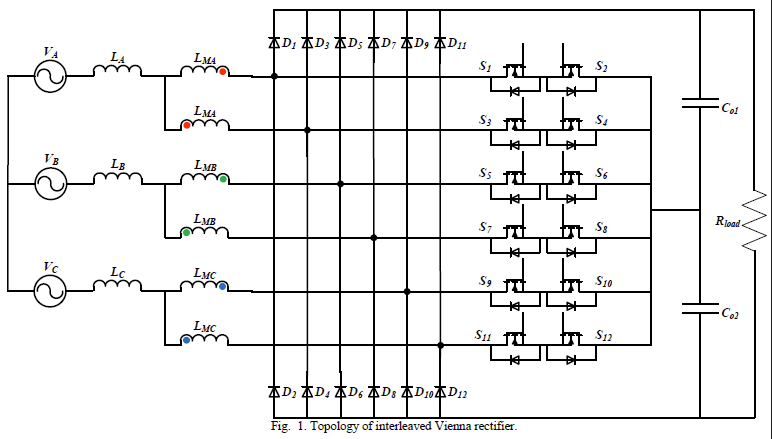
如图1所示,主拓扑是三相Vienna PFC拓扑的主电路:

图1 三相三电平Vienna主拓扑结构
-
三相二极管整流桥,使用超快恢复二极管或SiC二极管; -
每相一个双向开关,每个双向开关由两个MOS管组成,利用了其固有的反并联体二极管,共用驱动信号,降低了控制和驱动的难度。相比其他组合方案,具有效率高、器件数量少的有点; -
电流流过的半导体数量最少:以a相为例,双向开关Sa导通时,电流流过2个半导体器件,euo = 0,桥臂中点被嵌位到PFC母线电容中点;双向开关关断时,电流流过1个二极管,iu > 0时euo = 400V, iu < 0时euo = -400V,桥臂中点被嵌位到PFC正母线或负母线。

图2 单相电流路径
电路的工作方式靠控制Sa、Sb、Sc的通断,来控制PFC电感的充放电,由于PFC的PF值接近1,在分析其工作原理时可以认为电感电流和输入电压同相,三相电平衡,并且各相差120度。
-
等效电路 -
三相三电平Boost整流器可以被认为是三个单相倍压Boost整流器的Y型并联; -
三个高频Boost电感,采用CCM模式,减少开关电流应力和EMI噪声; -
两个电解电容构成电容中点,提供了三电平运行的条件;

图3 单相整流电路

图4 主电路等效电路
根据等效电路,各参数表达式如下:

注: 这个eun的表达式非常重要,是后面很多公式计算的基础,推导如下。
将如图1所示的主电路进行等效:

图5 电路等效图
列出电路的平衡方程,其中三相平衡下:

在任意时刻:

化简得到:

因此:

其中Vuo,Vvo,Vwo,是三相端点A、B和C的电压, L = La= Lb= Lc。
三. 工作原理
-
主电路的开关状态
三相交流电压波形如图6所示,U.V.W各相差120度

图6 三相交流电压波形
通过主电路可以看出,当每相的开关Sa、Sb、Sc导通时,U、V、W连接到电容的中点O,电感La、Lb、Lc通过Sa、Sb、Sc充电,每相的开关关断时,U、V、W连接到电容的正电平(电流为正时)后者负电平(电流为负时),电感通过D1-D6放电,以0~30度为例,ia、ic大于零,ib小于零。
每个桥臂中点有三种状态,三个桥臂就是3^3=27种状态,但不能同时为PPP和NNN状态,故共有25种开关状态;开关状态见附件!

-
主电路发波方式
主电路的工作状态与发波方案有比较大的关系,采用不同的发波方案会在每个周期产生不同的工作状态。一般Vienna拓扑采用DSP数字控制,控制灵活,可移植性强。
(1)采用单路锯齿波载波调制电流环控制器输出的调制信号被馈送给锯齿波载波,如图7所示,保持恒定的开关频率;在0~30度这个扇区内,每个周期产生4个开关状态,由于波形不对称,电流波形的开关纹波的谐波比较大;采用该种方式进行调试,桥臂中点线电压的最大步进是2Ed(Ed为母线电压的一半,400V);

图7 锯齿波载波方式
(2)采用相位相差180度的高频三角载波,如图8所示,当对应的输入电压是正半周的时候,采用Trg1,当对应的输入电压是负半周的时候采用Trg2,每个周期产生8个开关状态,与传统的控制方案产生4个开关状态相比,8个开关状态相当于频率翻倍,减小了输入电流的纹波,对THD指标有好处;

图8 三角波载波方式
三角波载波方式仿真波形如图9所示:

图9 三角波载波方式仿真波形
-
工作状态
上面我们提到,三相三电平PFC可以看作是三个单相的PFC,每个单相相当于由两个Boost电路组成,在交流电压的正负半周交替工作,正半周如下所示:

图10 单相ON-OFF电流波形
以a相为例,驱动信号为高时,则开关管Q1导通(交流电压的正半周)或者Q2导通(交流电压的负半周);驱动信号为低时,开关管Q1和Q2都关断。电压正半周时,a相上桥臂二极管导通;电压负半周时,a相下桥臂二极管导通。
通过上面的分析,采用移相180度的三角载波进行调制,在0~30度的扇区内有8种开关状态,4种工作模式ONO,ONP,OOP,POP。
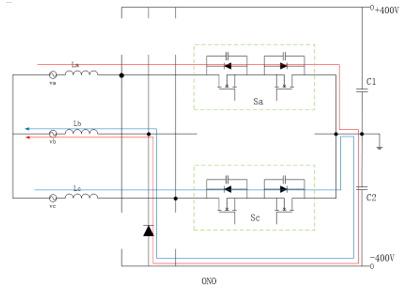
ONO工作模式:a相和c相导通,b相截至,U和W电压为0,V点电压-400V;该工作状态只给C2进行充电;

图11 ONO开关状态
ONP工作模式:a相导通,b相和c相截至;U点电压为0,V点电压为-400V,W点电压为+400V;

图12 ONP开关状态
OOP工作模式:U和V点电压为0,W点电压为+400V;

图13 OOP开关状态
POP工作模式:U和W点电压为+400V,V点电压为0,该工作模式只给C1进行充电;

图14 POP开关状态
当然,这只是在0~30度扇区的工作状态,其实在整个工频周期,是有25个工作状态的,具体见我上面发的开关状态附件。ONO和POP这两种工作模式只给C1或C2充电的状态对后面母线电压均压起决定性的作用。
四.器件应力的分析
-
PFC电感应力
从上面的工作状态,我们可以知道,PFC电感的前端接输入,后端电压在开关不同的状态分别接PFC电容三个电位,P,O,N,我们以输入的三相中点为基准, PFC母线电压是波动的,三个状态的电压分别为:

其中Vu,Vv,Vw为三相开关端点相对母线电容中点的电压,以A相为例,当Va>0时,Vu可以取0,400V,而其余B,C相可以取除(400V,400V)以外的任意向量,因B,C相不可能同时为正,所以此时PFC电感右端的电压范围-266~533V。
同理当Va<0时Vu可以取0,-400V,而其余B,C相可以取除(-400V,-400V)以外的任意向量,所以此时PFC电感右端的电压范围-533~266V。电感两端的电压峰值出现在该相60度时(大于60度后其余两相为负,GND到O的电压最大值变成了133V,所以从仿真上可以看出峰值电压的跌落,最大值为:

-
MOSFET和二极管应力
如图1所示,每相的两个二极管跨接在正负母线之间,其中点的电平可以为0,-400V,400V,所以对于二极管,其两端承受的最大平台电压为输出PFC输出电压,800V母线电压考虑MOS开关带来的电压尖峰,二极管的最大尖峰电压会接近1000V,其电流应力可以通过控制方程计算出来。
其实考虑整流二极管不仅要考虑耐压、通流能力,还有一个很重要的参数是抗浪涌冲击的能力。在实际调试的过程中,有尝试选择用SiC二极管,但是SiC二极管的抗浪涌冲击电流的能力比较弱,所以一般都是采用超快恢复的高压二极管,比如Microsemi的ATP30DQ1200B系列。
我们知道,当模块在打浪涌的时候,电流都是走低阻抗的路径,一般前级的压敏电阻会泄流一部分电流,但是压敏电阻不会泄放所有的电流,依然会有大量的电流留到后级电流中。对于单相模块,一般的做法是在PFC电感前面增加一个二极管到PFC母线电容,这样,浪涌电流就会通过防雷二极管引入到PFC母线电容,保护了功率器件。但是对于三相PFC而言,PFC电容是一个五电平的波动,无法采用这种方法。否则,电路正常工作时就会有电流流过该二极管而导致Vienna无法工作。所以,大电流会通过电感、PFC Diode进入母线电容,这个时候就要求PFC Diode抗浪涌电流的能力比较强。
MOSFET的VDS电压,由于采用三电平技术,使MOSFET电压只有三相PFC 800V母线电压的一半,考虑尖峰,这个电压会接近600V。对于MOS电压应力我们 最关心的是对顶MOS的中点相对三相输入的参考地的电位差 ,如果采用隔离光耦进行驱动,这个电压决定隔离驱动光耦的选型。
五.控制方案
我们知道,这种控制电路一般采取双环的控制方式,即电压外环+电流内环。电压外环得到稳定的输出直流电压,供后级电路的使用(比如Three Level LLC、PS Interleave LLC、PSFB 等),电流内环得到接近正弦的输入电流,满足THD和PF值的要求。

图15 控制环路
其实数字控制无非就是把vwin 的方案转换为数字的运算,可以参考如图16所示模拟PFC控制逻辑框图,利用它的控制思想来实现数字化。

图16 模拟控制框图
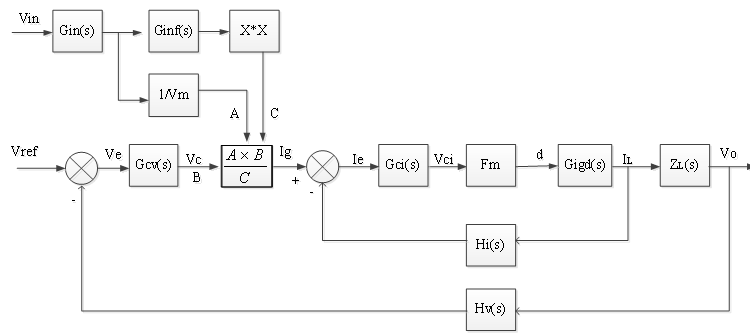
PFC母线输出电压经过采样和滤波由DSP的ADC采样到DSP内部,与电压给定信号进行比较,产生误差后经过Gvc(s)补偿起后输出一个A信号,然后通过乘法器与交流AC电压相乘得到电流的给定信号,正是该乘法器的作用才能保证输入电压电流同相位,使电源输入端的PF值接近1;将采样的电感电流波形与电流给定进行比较得出误差,经过Gic(s)补偿器进行补偿后得到电流环的输出值,该值直接与载波进行调制,得到PWM波形,控制电压和电流;大致的控制框图可以用下图来简化表示,如图17所示;

图17 PFC传递函数框图
其中:Gcv(s)为电压环的补偿函数,Gci(s)为电流环的补偿函数,Hi(s)为电流环采样函数,Hv(s)为电压环采样函数,Gigd(s)为电感电流对占空比D的函数。
六.控制地的选择
在传统的单相有桥PFC中,一般把PFC电容的负极作为控制AGND,因为该点的电压通过整流桥跟输入的L、N相连。当输入为正半周的时候,AGND为整流桥钳位在N线;当输入负半周的时候,AGND被整流桥钳位在L线;所以母线电容的负极地AGND(相当于PE)是一个工频的变化,由于输入一般都是50Hz的交流电,所以相对还是比较稳定的,可以作为控制电路的控制地。
但是相比较Vienna PFC就不一样了,母线电容的中点相对与工频电压中点(PE)是一个开关级的5电平高频变动的电平:±2/3Vo、0、±1/3Vo(这里的Vo代表母线电压的一半,典型值400V,5电平是如何产生的请参考开关状态附件的eon),如果以如此大的高频波动去作为控制地的话,那么噪声和共模干扰就会非常的大,可能会导致采样电压和驱动不准确,严重影响到电路的可靠性。
由于电容中点的高频变化不能作为控制地,那怎么办?我们是否可以认为的构建一个虚拟的地来作为控制地AGND?我们可以采用在三相输入之间通过分压电阻相连,采用Y型接法来产生虚拟地而作为控制地。不过构建了这个控制地后,那么其他所有的采样、驱动都要以差分和隔离的方式相对于这个控制地来工作。采用这种方法,输出电容中点O与控制地AGND分开了,避免了高频剧烈变动带来的干扰。

图18 控制地AGND
这样做是不是完美解决了控制地的问题?在实际工作过程中,AGND依然存在剧烈的波动,并不是我们想象的那么平静,AGND跟随着O在剧烈的波动,AGND的峰峰值非常的大。
如何解决?其根本原因是AGND 和O之间存在采样电阻的连接(输出电压的采样),而AGND跟PE之间又存在Y电容连接,在O点的高频信号作用下,AGND自然就被迫分担一定比例的电压。解决方案是在AGND与PE之间增加一个低阻通路来降低阻抗,承担一定的电压来降低AGND-PE的纹波电压。
七.母线均压原理的分析
我们知道,三相Vienna PFC拓扑的母线电压800V是由两个电容C1和C2串联进行分压,电容中点的电位O由电容的充放电决定,两个电容的电压应该保持均衡以保持真实的三电平运行条件。否则输出电压可能包含不期望的谐波,甚至会影响到电路的完全性。
三相三电平PFC正负母线的均衡度会影响PFC的性能:
1、输入电流THD;
2、功率开关管和二极管的应力(本身以及后级功率电路);
3、动态时母线电容容易过压;
电容中点的电位偏差与PFC正负母线电容的充放电过程相关,通过附件开关状态可以看出,a组和z组工作状态没有电流流入或流出电容中点,因此两个电容的充放电是一样的,不会产生偏压。只有b、c、d组的开关状态才会影响到PFC母线电容充放电的差异,产生偏压。
根据前面的工作原理分析,POP工作状态只给电容C1进行充电,ONO工作状态只给电容C2进行充电,故可以根据这两个工作状态来控制中点电位,在控制中可以调节ONO和POP两个工作状态的作用时间来进行均压。

图19 C2充电

图20 C1充电
这个时候可以在整个控制环路中添加一个偏压环,用于调节ONO和POP的作用时间,来进行母线电压的均压作用。
具体实施方:是分别对正母线和负母线进行采样,然后得出差值(直流分量),该差值经过偏压环的补偿器调节之后叠加到输入电流参考正弦波,经过精密整流后变换为幅值有差异的双半波作为电流环的给定,以此来改变ONO和POP的作用时间,改善PFC母线均压。

图21 偏压给定
如图22所示,compa、compb和compc分别是每相的电流环计算出来的结果,以0~30度扇区为例,当正母线相对于中点的电压低于负母线时,正半波的给定变小,负半波的给定变大,POP工作状态的时间变长,给正母线电容的充电时间变长;ONO工作状态的时间变短, 给负母线电容的充电时间变短。当正母线相对于中点的电压高于负母线时,正半波的给定变大,负半波的给定变小,POP的作用时间变长,给正母线电容充电的时间变短,ONO的作用时间变长,给负母线的充电时间变长。图中comp值实线代表上个周期的值,虚线代表当周期的值;阴影部分代表变化的时间;

图22 均压控制示意图
以上说明的是主功率回路正常工作时候可以通过调节来控制PFC母线电容的均压,但是当模块起机的时候呢?可以采用辅助电源直接从+400V~-400V之间进行取电,由于电容有差异性,内阻不可能完全相等,也会差生偏压。还有一个是要采用更高等级的MOSFET,成本高,而且现在充电模块的待机损耗也是一个问题,很多客户要求模块的待机损耗不能超过多少。
当然还有另一种辅助电源取电方式,也是现在厂家主流的方式。就是正负母线均挂一个辅助电源,在起机的时候通过充电电阻给母线电容充电,变压器采用绕组竞争的方式,谁的母线电压高,就采用谁供电,这样可以很好的保证模块在起机过程中的均压效果;在模块正常工作起来以后,也是同样的道理。而直接从+800V取电没有这种效果。

图23 辅助电源示意图
八.原理仿真
-
输入电流
输入电流波形,参数没有调好,将就着看吧。

图24 输入电流波形
-
各点电压波形
输入线电压峰值与PFC总母线电压的比值定义为调制系数m,m=Vlp/2Ed;其中Vlp是线电压的峰值;整流器可以被认为是与市电通过PFC电感连接的电压源,为了使输入电流正弦,桥臂中点线电压也应该为正弦波形。而实际情况下桥臂中点线电压是正弦 PWM波形,谐波分量和最大步进是两个主要考虑的因素。
(1)当输入线电压峰值值大于Ed时,桥臂中点线电压电压波形euv,是一个5阶梯的电压波形,幅值为0,±400V,±800V,步进是400V;

图25 桥臂中点电压1
(2)当输入线电压峰值值小于Ed时,桥臂中线线电压波形是一个3阶梯的电压波形,幅值为0,±400V,步进为400V;

图26 桥臂中点电压2
桥臂中点相对与市电中点的电压波形eun,是一个9阶梯的电压波形;幅值为0,±133V,±266V,±400V,最小步进是133V,最大步进是266V;由于功率开关管和散热器之间有寄生电容,这个阶梯信号会产生共模噪声;

图27 eun电压波形
电容中点O相对于市电中点的电压波形eon,是一个5阶梯波形,幅值为0,±133V,±266V,步进为133V;

图28 eon电压波形1

图29 eon电压波形2

图30 eon电压波形3
最后附一张电路起机波形:

图31 起机波形
九.环路分析及数字化
-
工作原理
输入交流电压和电感电流,以及PFC母线电压经过采样和滤波由DSP的ADC口采样到DSP内,然后通过一个电压反馈补偿器Gcv(S),输出电压环的反馈信号Vc,然后通过一个乘法器单元将电压调节器的输出Vc与输入电压的全波整流波形相乘,得到整流桥后电流的指令值Iref。正是该乘法器保证了输入电流与输入电压同相且波形相同,使电源输入端的功率功率因数为1,它是实现功率因数校正功能的关键。在图1所示的电路中,PFC参考电流合成器还包含了一个输入电压全波整流值的平方电路和除法器,主要是为了提高控制系统对输入电压变化的动态响应速度,它对于宽输入电压范围和输入电压波动较大的应用场合更为必要,我们将上面的电路框图用传递函数框图表示:

图32 PFC传递函数框图
其中:Gcv(s)为电压环的补偿函数,Gci(s)为电流环补偿函数,Vm为载波幅值,Gigd(s)为电感电流对占空比D的函数,ZL(s)为电感电流到输出电压的阻抗,Hi(s)为电流环采样函数,Hv(s)为电压环采样函数。
在三相PFC的数字控制当中,可以采用Microchip双核dsPIC33CH系列,由于其内部具备双核CPU,所以整个控制我们分配在两个内核中,主核Master完成电压环以及保护和快速采样滤波计算等环节,从核Slave完成电流环和发波的功能。
双核示意图如下:

图33 dsPIC双核框图
双核系列的dsPIC具有如下特点:

图34 PFC电流环框图
在Vienna电路中,两组PFC母线电容对输入等效为以中点为基准的两个并联电容组,三相二极管电流对其充电,对输出而言其又等效为两个串连的电容,对负载供电,所以每相流入PFC电容电流和流出PFC电容电流的关系为2/3。
故三相Vienna拓扑的主电路传递函数为:

L_fulload为满载情况下PFC电感值,RL为电感串联电阻。
我们知道了主电路的传递函数后,其他比如AD增益(包括采样、保持、转换)、硬件采样电路、Fm等传递函数都可以表达出来了。这样除了补偿器之外的开环传递函数都清楚了,计算或者仿真出除补偿器的Bode图,根据开环传递函数的Bode图,设计出合理的补偿器。
在数字电源控制中,一般采用的补偿器有PI控制器、SZSP控制器、2P2Z控制器、3P3Z控制等。在开关频率以下,电流环开环传递函数为一个单极点系统,可以将补偿函数设计为一个PI控制系统。
由于PFC电感在不同的直流偏置下感量变化非常明显,nFeSi材质在正弦电流过零点和峰值附近相差近3倍,为了能提高过零点的低频增益和带宽,同时保证峰值附近的稳定,我们需要实时的调节电流环的相关参数,这样能时时的改善带宽和增益。
-
电压环

图35 PFC电压环
PFC电流内环和功率级形成一个电流源,因此PFC电压环的被控对象在低频可以等效为驱动电容的电流源,在100Hz频率附近,电压环开环传递函数为一个单积点系统。PFC电压环在确保当负载变化时输出电压稳定的同时,带宽应该足够低,从而使频率大于100Hz时的环路增益足够低,以减小PFC输出电容上的100Hz电压纹波对PFC输入电流的调制作用,否则该调制作用会引起输入电流的严重畸变,当然过低的电压环带宽回导致电压动态速度过慢,在THD设计满足要求的情况下,可以再调节带宽。
以上是针对稳态的电压环设计,如果输入或者输出在进行动态跳变,为了保证电路的可靠性,可以加入快环。也即在动态时,为了加快环路响应,满足动态的要求,采用另外一组环路参数,同时去除软件滤波。当总母线电压采样大于或者小于当前总母线电压给定的一定值时,进入快环;当总母线电压采样不再大于或者小于当前总母线电压给定另一值时,退出快环。当然,由于母线电容的ESR容易受环境温度的影响,所以当环境温度过低时,母线电容的ESR增大,电压环调节过快,会导致母线电压过压。
所以电压环的设计不仅要考虑到稳态的低带宽,还要考虑动态响应以及受环境温度的影响。
-
母线电压偏压环
PFC电路有正负母线输出,所以要控制正负输出平衡: 。把叠加到电压波形给定中去,这样可以调节母线平衡(见均压原理分析)。
。把叠加到电压波形给定中去,这样可以调节母线平衡(见均压原理分析)。
母线电压偏压环是纯比例环节,即有静差调节,所以即使最终调节稳定的情况下,母线还是会存在一定的差异,如果K越大,δ 输出就越大,调节能力就越强,平衡度就越好,但是注入到输入电流的谐波也就越大,影响THD指标。所以需要在THD和母线平衡之间做出平衡。
为了消除正、负母线之间的静差,可以采用PI环节来代替纯比例环节,但是积分环节本身存在退饱和的问题,对于Vp, Vn 不停变化的系统,调压是通过改变小矢量的持续时间,积分的响应速度慢,可能反而对小矢量超调或欠调,导致正、负母线电压一直处于偏压的状态。所以采用纯比例环节进行正、负母线电压的调节可以保证时时性。
由于母线偏压环的调节,会对THD造成影响,所以要根据母线偏压的程序选择比例系数和输出δ的最大范围,避免过分调节。
-
补偿器的数字化
数字补偿器设计流程如下:
-
首先选择一个合适的已知原型滤波器传递函数(要选择合适的零极点); -
将该原型滤波器的s域传递函数映射到z域中; -
将z域转换为时域内的线性差分方程;
从s域到z域的变换,我们一般采用双线性变换,又称Tustin变换和梯形变换。它将s域中的模拟传递函数转换为z域中的等效数字传递函数,它只是表示的一个近似值,相对于采样频率的交叉频率越低,近似值就越可靠。
以3P3Z控制器设计为例,在s域的表达式为:

进行双线性变换,将  带入Hc(s)中,经过化简可以得出z域表达式:
带入Hc(s)中,经过化简可以得出z域表达式:

将z域转换为线性差分方程:

在MCU里面执行的大致过程如图36所示:

图36 数字Ⅲ型控制器实现方式
如想更详细的了解模拟s域到z域的转换,请登录Microchip官网或者咨询相关应用工程师。
-
二极管
+关注
关注
147文章
9627浏览量
166294 -
充电模块
+关注
关注
0文章
35浏览量
13248 -
VIENNA
+关注
关注
2文章
12浏览量
8237
发布评论请先 登录
相关推荐
美高森美展出新型30 kW三相Vienna PFC参考设计和SiC解决方案
基于powerSUITE的TIDM-1000三相VIENNA PFC方案的软件实施过程是怎么样的?
C2000 MCU三相功率因数校正参考设计包括BOM及层图
探讨交流个人对「三相 VIENNA 拓扑」的理解
三相VIENNA整流器调试过程中遇到的问题
T型三电平双向整流和逆变的功能
三相三电平VIENNA整流器的仿真分析
三相电源测量基础知识

大厂48V100A 电源,三相输入,Vienna+三电平半桥 拓扑,内容包含原理图 源代码 附赠大功率电源开发资料
一个关于三相Vienna拓扑技术知识(下)





 工商网监
工商网监
评论