 什么是波特图?为什么要学波特图呢?
什么是波特图?为什么要学波特图呢?
为什么要学习波特图呢?
波特图将传输函数和频率响应定性的联系起来了,通过波特图的绘制,可以了解极点和零点是怎么影响频率响应的幅度和相位,进而影响电路的性能。
换成人话,可以这样说。
呀,这个电路不稳定啊。画画波特图,噢,原来相位裕度接近为0啊。这个可以看看,电路上哪些因素会影响极点零点的位置,调整一下,就能改进电路的稳定性。
什么是波特图?
在这里先推荐一篇轻松看懂波特图(点击阅读) 波特图也是根据人名命名的,它是出自贝尔实验室,由荷兰裔科学家 Hendrik Wade Bode在1930年发明的。
Bode当时需要设计用于电话网络的放大器,放大器带有负反馈。
为了能够快速了解放大器保持绝对稳定所需的增益裕度和相位裕度,Bode开发了波特图。
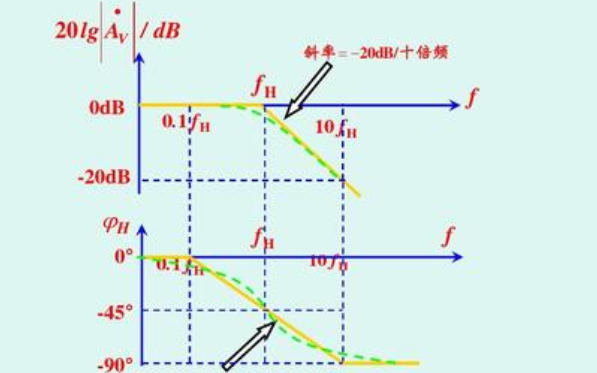
假设一系统为线性时不变系统,传输函数为H(s)。则波特图有两副图,幅频图和相频图,分别对应增益和相位。
幅频图是|H(s=jw)|随频率的函数,其横轴为频率,用对数尺度表示;纵轴为功率的dB值,即20log10|H|。
相频图是arg(H(s=jw))随频率的函数,其横轴为频率,用对数尺度表示;纵轴的单位一般为度,为线性值。
怎么画波特图?
画幅频图时,遵循以下规则:
(1) 当频率w经过极点时,|H(jw)|的斜率变为-20dB/dec,也就是以频率变化10倍,|H(jw)|变小20dB;
(2) 当频率w经过零点时,|H(jw)|的斜率变为20dB/dec,也就是以频率变化10倍,|H(jw)|变大20dB;
(3) 图在起始点时的增益值,可以计算频率的下限值对应的|H(jw)|;
如果零点没有在原点处的时候,可以将w=0代入|H(jw)|,计算其在DC处的增益;
如果有零点处在原点处,则可以选择一个靠近w=0的值,比如说w=1作为|H(jw)|的初始值。零点在原点,即w=0时,|H(jw)|=0,因为纵轴是对数值,所以不可能在图中包括|H(jw)|=0的值。
(4) 图在起始点的斜率,取决于在w小于起始点处零点和极点的个数,然后按照(1)和(2)的规则计算;如果在w小于起始点处无零点和极点,则初始斜率为0。
画相频图时,遵循以下规则:
(1) 假设极点为wp,即其则曲线在0.1wp处开始变化,在wp处变化-45度,在10wp处变化接近于-90度。
(2) 假设零点为wz,则曲线在0.1wz处开始变化,在wz处变化45度,在10wz处变化接近于90度。
看到电路,快速画出波特图,了解系统的稳定性
如下图所示,是一个通用的反馈系统框图。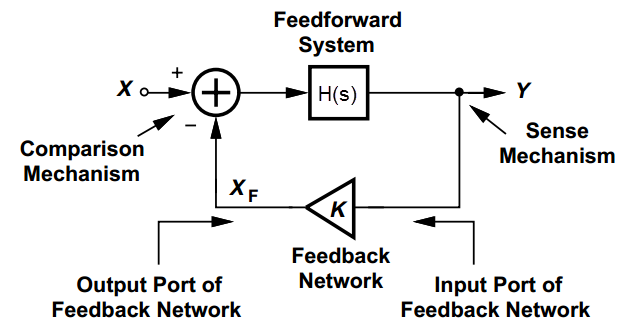
当K等于0时,没有反馈,此时系统为开环系统; 当K不等于0时,此时系统为闭环系统。 该系统的传输函数为: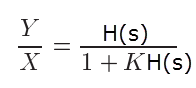
其中,KH(s)称为环路增益。
假设上面的系统的输入为正弦信号,则s=jw。这个假设是合理的,因为任何信号都可以分解成多个正弦函数之和。
所以: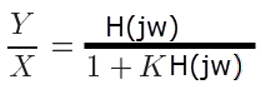
由上面等式可知,当KH(jw)=-1时,Y/X-->无穷大,即使X很小很小,也会导致很大的Y输出,即系统处于振荡状态,不稳定。
所以为了保证系统稳定,需要在任何频率处都不能满足KH(jw)=-1的条件,即|KH(jw)|=1&arg(H(jw))=-180度。
那如果是|KH(jw)|>1&arg(H(jw))=180度呢?
因为每经过一次环路,信号都会被进一步放大,因为反相,所以叠加出来的信号会变得越来越大。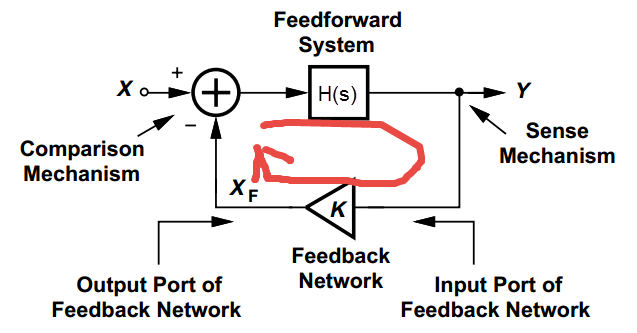
所以当 |KH(jw)|>=1 arg(KH(jw))=180度, 系统都处于一个不稳定的状态。
用图形示意,可能会比较直观。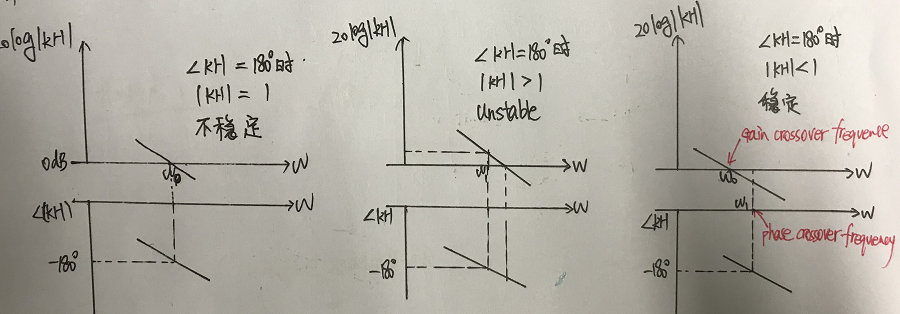
增益等于0dB对应的频率,称为gain crossover frequency. 相位等于-180度对应的频率,称为phase crossover frequency. 若系统稳定,则要求gain crossover frequency
所以,如果电路只包含一个极点的话,那么这个系统肯定是稳定的。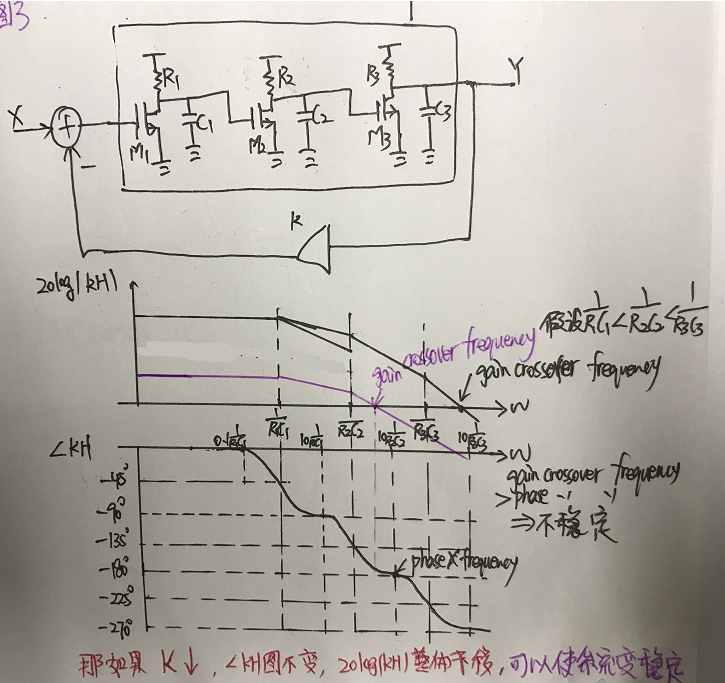
可以看到,系统中相应部件对最后波特图的影响,比如说,原来系统处于不稳定的状态,但是当降低K的值时,系统则会变稳定。
增益裕度和相位裕度
增益裕度和相位裕度都是衡量系统稳定程度的方法。
在相位图上,找到相位达到-180度时对应的频率,然后计算该频率对应的幅度值。如果|KH(jw)|180>=1,则该系统不稳定;如果|KH(jw)|180<1,则系统稳定。
而20log|KH(jw)|180即为增益裕度,代表相位达到-180度时对应的幅度值与0dB的距离。
在波特增益图上,找到|KH(jw)|=1的频率,称为w0dB,然后找到该频率下KH(jw)w0dB的相位。
如KH(jw)w0dB的相位大于-180度,则系统稳定。
KH(jw)w0dB的相位与-180度之间的差,称为相位裕度。
一般取相位裕度为60度左右,此时任务系统处于一比较好的稳定状态。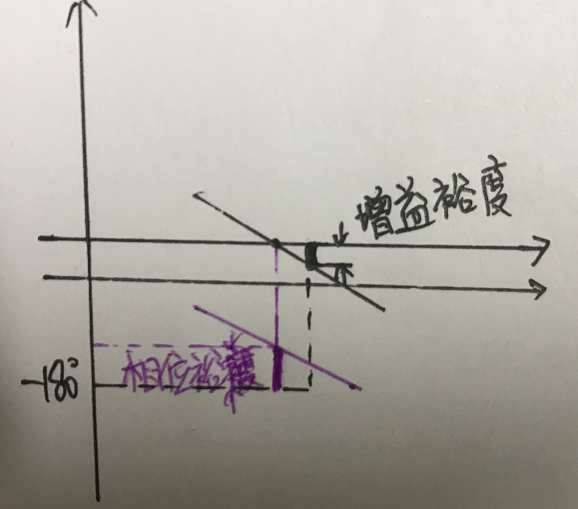
不想自己手工画波特图,怎么办?
计算机已如此普及,当然可以不用手工画啦。matlab中有现成的函数。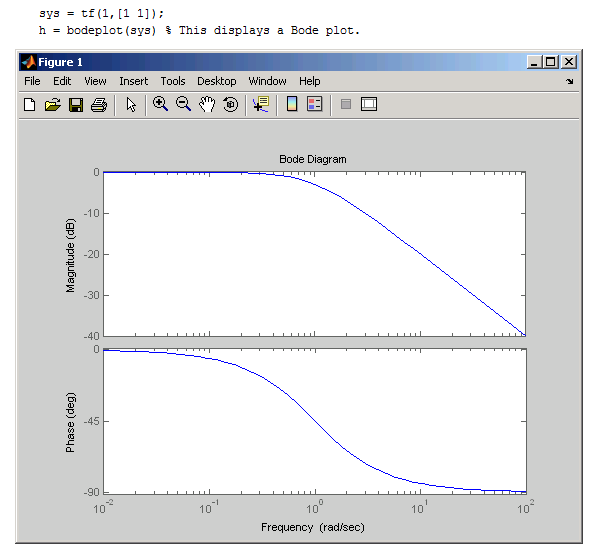
还有什么可以用到波特图呢?
那就是锁相环。
当环路滤波器只有一个电容时,如下图所示。
可以看到环路中只有两个零极点,所以相位图为接近-180度的一条直线,因此其总相位裕度基本为0,表面这个锁相环是不稳定的。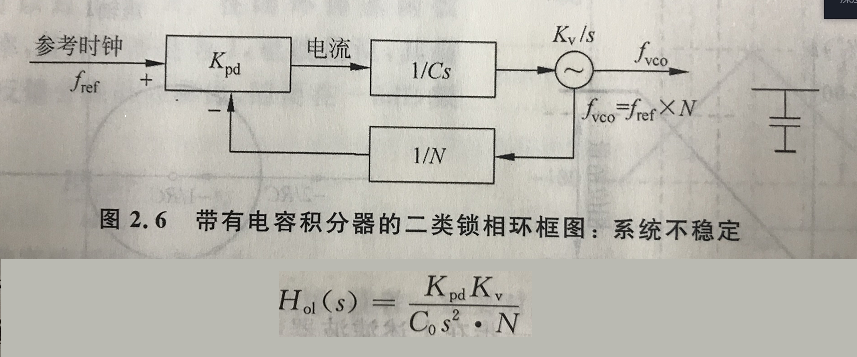
解决问题的一个办法是给电容加入一个串联电阻R,这样就引入了一个零点,从而对环路进行相位补偿。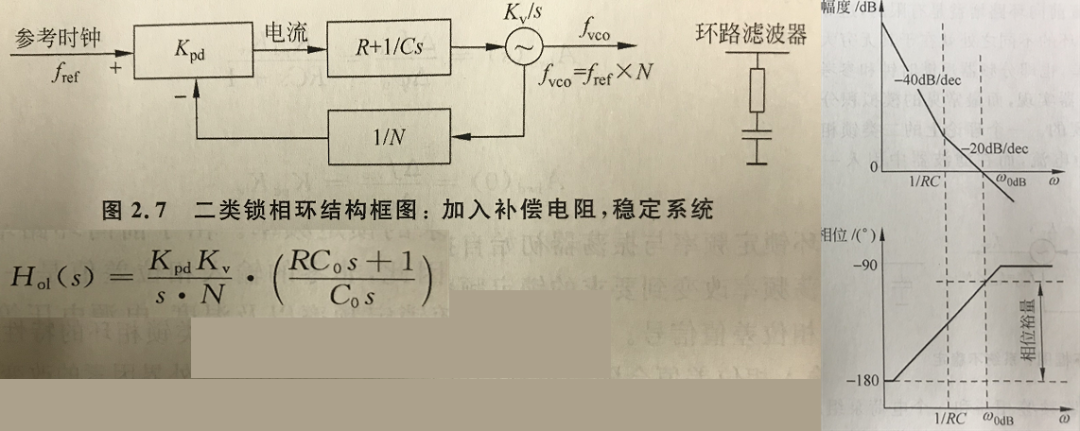
在实际的应用中,需要额外增加电阻电容低通滤波器,以滤掉一些高频噪声和电压波动。
其中最简单的一种是在上述电容电阻两端再加一个电容C1,通常C1远小于积分电容C0,如下图所示。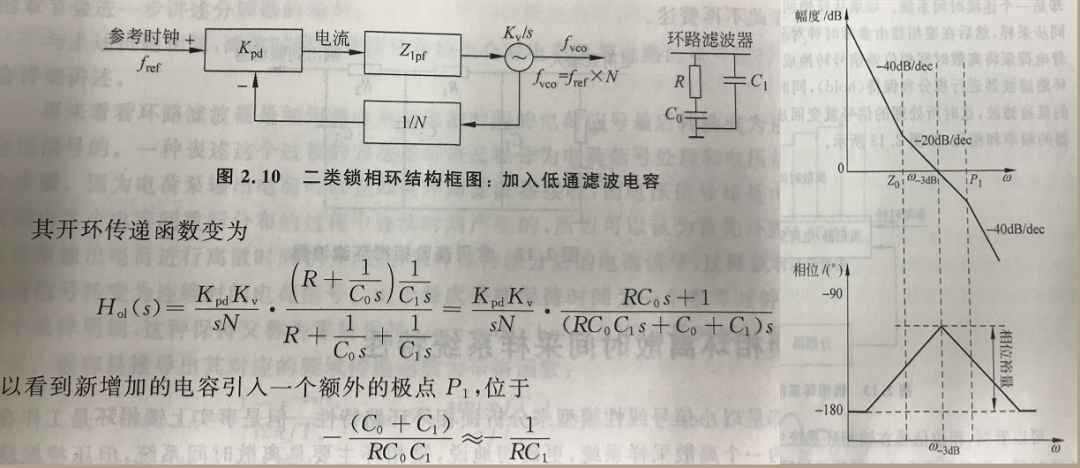
这就是我们常用的环路滤波器的结构。
审核编辑:刘清
-
放大器
+关注
关注
143文章
13583浏览量
213363 -
波特图
+关注
关注
1文章
29浏览量
11313 -
电阻电容
+关注
关注
1文章
40浏览量
9517 -
环路滤波器
+关注
关注
3文章
26浏览量
13157
原文标题:什么是波特图?为什么要学波特图?
文章出处:【微信号:mcu168,微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

波特图仪的SPICE陷阱
如何利用波特图来快速评估电源设计
什么是波特图?怎么画波特图?

教你如何看懂波特图
什么是波特率?为什么要设置波特率?

什么是串口波特率?串口通信为什么要设置波特率?






 工商网监
工商网监
评论