 线阵相机知识大合集
线阵相机知识大合集
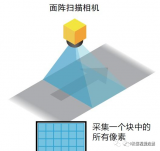
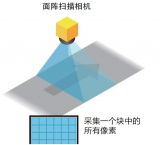
线阵相机顾名思义就是取像是成线性的。它的传感器是成线型的。
举个例子:
比如面阵相机的分辨率是640*480就是说这个相机横向有640个像元,纵向有480个像元。
而线阵相机分辨率只体现在横向,比如2048像素的线阵相机就是说横向有2048个像元,纵向大多数为1。(RGB相机和TDI相机除外)
1 关于线阵相机的传感器 70年代大多数使用的是MOS,而从70年代末CCD开始迅速发展,一直到现在也是主流,CMOS大概是在80年代中期开始出现的,但是随着技术的发展CCD的取像速度要低于CMOS,而且直到2010年以前CMOS的传感器价格要高于CCD,从2010年以后几家主要的相机制造商都已经大力开发CMOS的相机了,并且也得到了不少的实际应用。 鄙人认为,以后的线阵相机主流将是CMOS的传感器。(这两种传感器的优缺点大家可以到网上找,主要是取像速度和敏感度的差异)
2 线阵相机的几个重要参数:
resolution: 像素数, 传感器上有多少个像元。
MAX DATA RATE(应该叫相机时钟吧):意思是相机每秒可以采取最大的数据量。
Linerate 行频:意思是每秒钟相机最大可以采取多少行影像
比如像素为8192*1, data rate为160Mhz, 那么此相机的行频就是160M/8192= 19000line/sec。
每秒钟最大可以取像19000行,横向为8192pixel,纵向为19000pixel, 1秒钟取得的这幅图像大小大概为160M。
还有就是像元的大小和镜头的尺寸。一般ccd的像元大小最小为5um,再小好像做不出来,而且感光度也差,cmos的像元可以比ccd小近一倍。
相机的选择十分重要,直接关系到整体设备的成本,像素多就要采用大的镜头,数据量大就要采用传输率大的数据线,还需要图像处理卡,数据量大对运算要求也高,对计算机的要求也高。
相机的输出方式也有多种,8bit,10bit,12bit, 我主要了解的就是8bit 黑白256进制影像。
有single输出,取像时1,2,3,~8192,有双输出,1,3,5,7/ 2,4,6,8, 也有1,3,5~4095/ 4097,4099~8191
这里的输出方式可以大概了解下(一般使用默认值对取像不会造成影响)
相机的主要几个设定有exposre,gain,还有内触发/外触发模式,不常用的当然也有很多如平均影像灰度,offset设定等等。
exposure , 这个设定和相机的行频有直接关联,此设定必须低于可以采取的最大行频。
线阵相机的应用领域,主要为连续的生产线(web),比如钢铁冶金,有色金属,电子素材,纺织,造纸,LCD等等,也可以说面阵相机可以应用的领域线阵相机也都可以完成,但是就是成本问题了。
线阵工业相机的选型
计算分辩率:幅宽除以最小检测精度得出每行需要的像素
选定相机:幅宽除以像素数得出实际检测精度
每秒运动速度长度除以精度得出每秒扫描行数
根据以上数值选定相机如幅宽为1600毫米、精度1毫米、运动速度22000mm/s
相机:1600/1=1600像素
最少2000像素,选定为2k相机
1600/2048=0.8实际精度
22000mm/0.8mm=27.5KHz
应选定相机为2048像素28kHz相机
线阵镜头的选型
为什么在选相机时要考虑镜头的选型呢?常见的线阵相机分辨率目前有1K,2K,4K,6K,7K,8K,12K几种,象素大小有5um,7um,10um,14um几种,这样芯片的大小从10.240mm(1Kx10um)到86.016mm(12Kx7um)不等。很显然,C接口远远不能满足要求,因为C接口最大只能接22 mm的芯片,也就是1.3inch。而很多相机的接口为F,M42X1,M72X0.75等,不同的镜头接口对应不同的后背焦(Flange distance),也就决定了镜头的工作距离不一样。
确定了相机分辨率和像素大小,就可以计算出芯片尺寸(Sensor size);芯片尺寸除以视野范围(FOV)就等于光学放大倍率。β=CCD/FOV
接口(Mount):
主要有C、M42x1 、F、T2、Leica、M72x0.75等几种,确定了之后,就可知道对应接口的长度。
后背焦(Flange Distance)
后背焦指相机接口平面到芯片的距离,是一个非常重要的参数,由相机厂家根据自己的光路设计确定。不同厂家的相机,哪怕是接口一样,也可能有不同的后背焦。
有了光学放大倍率、接口、后背焦,就能计算出工作距离和节圈长度。选好这些之后,还有一个重要的环节,就是看MTF值是否足够好?很多视觉工程师不了解MTF,而对高端镜头来说就必须用MTF来衡量光学品质。MTF涵盖了对比度、分辨率、空间频率、色差等相当丰富的信息,并且非常详细地表达了镜头中心和边缘各处的光学质量。不仅只是工作距离、视野范围满足要求,边缘的对比度不够好,也要重新考虑是否选择更高分辨率的镜头。
线扫描线阵光源的选型
线扫描项目中,常用的光源有LED光源、卤素灯(光纤光源)、高频荧光灯。
卤素灯也叫光纤光源,特点是亮度特别高,但缺点也很明显--寿命短,只有1000-2000小时左右,需要经常更换灯泡。发光源是卤素灯泡,通过一个专门的光学透镜和分光系统,最后通过光纤输出,光源功率很大,可高达250瓦。卤素灯还有一个名字叫冷光源,因为通过光纤传输之后,出光的这一头是不热的且色温稳定,适合用于对环境温度比较敏感的场合,比如二次元量测仪的照明。用于线扫描的卤素灯,常常在出光口加上玻璃聚光镜头,进一步聚焦提高光源亮度。对于较长的线光源,还用几组卤素光源同时为一根光纤提供照明。
高频荧光灯,发光原理和日光灯类似,只是灯管是工业级产品,特点是适合大面积照明,亮度较高,成本低,但荧光灯最大的缺点是有闪烁、衰减速度快。荧光灯一定需要高频电源,也就是光源闪烁的频率远高于相机采集图象的频率(对线扫描相机来说就是行扫描频率),消除图像的闪烁。专用的高频电源可做到60KHz。
LED光源是目前主流的机器视觉光源。特点是寿命长,稳定性好,功耗非常小。
1,直流供电,无频闪。
2,专业的LED光源寿命非常长。(如美国AI的寿命50000小时亮度不小于50%)
3,亮度也非常高,接近卤素灯的亮度,并且随着LED工艺的改善不断提高。(目前美国AI线光源亮度高达90000LUX)
4,可以灵活地设计成不同结构的线光源,如直射、带聚光透镜、背光、同轴以及类似于碗状的漫反射线光源。
5,有多种颜色可选,包括红、绿、蓝、白,还有红外、紫外。针对不同被测物体的表面特征和材质,选用不同颜色也就是不同波长的光源,获得更佳的图像。
光源、镜头的调试
线扫描系统,对光源和相机来说,有效的工作区域都是一个窄条。也就是保证光源照在这个最亮的窄条与相机芯片要完全平行,否则只能拍到相交叉的一个亮点。所以机械安装、调试是比较费工夫的。同时由于幅宽比较宽,对于线光源有两个特别的要求,就是均匀性和直线性。因为线光源不同位置的亮暗差异,会直接影响图象的亮度高低,这一点LED比卤素灯更好控制。出光部分的直线性,取决于LED发光角度的一致性、聚光透镜的直线性以及线光源外壳的直线性。
由于现场环境比较复杂,客户总是希望花多一些时间去现场调试。但如我们前面讲到的相机、光源、被测物体的相对角度测试、分析,许多因素会直接影响到检测效果。所以我们建议先做实验室测试,有了方案之后,再去现场调试,这样会最有把握,也能提高调试效率。毕竟服务也是一种成本。
线扫描系统除了机械结构之外, 其主要组成部分还包括机器视觉和运动控制。要保证采集到的图像不被拉伸或者压缩,必须遵从一点,即“横向和纵向的分辨率相等”。
首先设定以下变量:
1)线阵相机的每线像素数(单位:pixel):Hc
2)目标物的宽幅(单位:m):Lo
3)目标物运行速率(单位:m/s):Vo
4)线阵相机线扫描速率(单位:Hz,即 线/s):Vc
5)扫描一帧图像目标物运行的时间(单位:s):To
6)扫描一帧图像线阵相机的扫描时间(单位:s):Tc
那么,
横向的分辨率为:Lo/ Hc,标定纸的值/单个相机像素(4096)
纵向分辨率为:( Vo* To ) / ( Vc* Tc ),速度/line值
很容易知道,To = Tc
根据“横向和纵向的分辨率相等”的原则,得到公式如下:
Lo/ Hc = Vo / Vc
则相机的线扫描速率为:
Vc = Hc * Vo / Lo
审核编辑 :李倩
-
传感器
+关注
关注
2550文章
51035浏览量
753047 -
CMOS
+关注
关注
58文章
5710浏览量
235401 -
相机
+关注
关注
4文章
1350浏览量
53580 -
分辨率
+关注
关注
2文章
1058浏览量
41918 -
线阵相机
+关注
关注
0文章
21浏览量
953
原文标题:【光电智造】线阵相机知识大合集
文章出处:【微信号:今日光电,微信公众号:今日光电】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
线阵相机与面阵相机的区别与选型
利用线阵CCD自动测量航空相机镜头的焦距
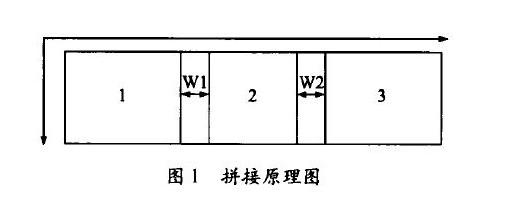
采用实时高精度拼接方法实现多线阵CCDS相机大幅面扫描仪的设计
机器视觉线阵相机原理和应用
工业面阵相机和线阵相机的异同点分析
工业面阵相机和线阵相机的应用对比和选型
为什么需要使用线阵相机 线阵相机与面阵相机的区别
面阵相机和线阵相机的区别





 工商网监
工商网监
评论