 如何用PID指令如何编写PID程序
如何用PID指令如何编写PID程序
PID程序除了可以用PID向导组态的方法编写,还可以利用PID指令进行编写,指示程序稍微繁琐些,如果自己编写程序可以选用向导完成,但是如果调试修改别人用PID指令编写的程序,就必须要学会用指令编写。
在目录树>浮点运算>PID调出PID运算指令如下图:
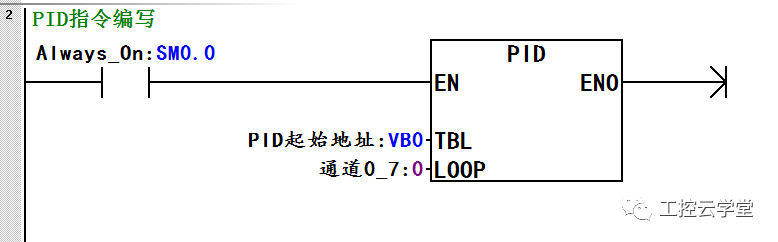
LOOP:PID运算通道号。可以设成0-7共八个PID回路。
TBL:PID回路起始地址,共分配80个字节。常用地址分配表如下表,更多地址分配参看帮助中PID回路定义表:

定义过程变量输入PV,由上表可知缓存在地址VD0中,vwin 量传感器将外部温度检测成4-20ma电流信号输给模拟量输入模块变换成5530-27648数值,利用模拟量换算库I_to_R将输入模块检测的数值5530-27648换算成0.0-1.0存储到VD0中,如下图所示:

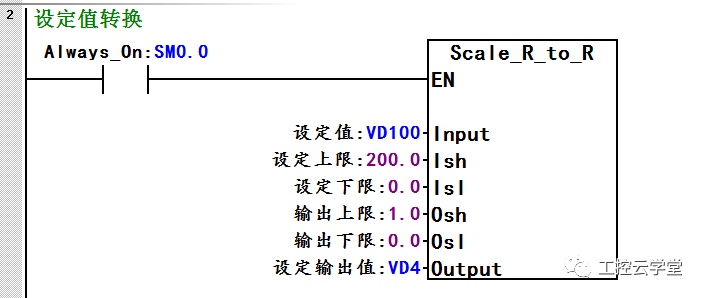
定义设定值,缓存在地址VD4中,利用模拟量换算库R_to_R将设定温度0-200摄氏度范围换算成0.0-1.0范围的浮点数存放到VD4中,如下图所示:
PID输出值转换,PID运算后输出值缓存在地址VD8中,输出值为0.0-1.0范围的浮点数,利用模拟量换算库R_I将输出值0.0-1.0范围的浮点数转换成5530-27648范围的整数赋给AQW16再变换成模拟量控制外部设备,如下图:

最后根据参数定义表找到增益 (P)VD12,采样时间 (TS)VD16,积分时间或复位 (I)VD20,微分时间或速率 (D)VD24,设置好采样时间,再通过调节PID参数使系统趋向稳定。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网 网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- PID
+关注
关注
35文章
1460浏览量
84598 - 程序
+关注
关注
114文章
3686浏览量
80191
发布评论请先登录
相关推荐
PID控制算法仿真与控制
PID控制算法仿真与控制:了解计算机控制过程,及用不同种高级语言
编写实验
程序的方法与特点。单回路温度控制箱了解
PID算法和
程序设计。掌握阶跃
发表于07-01 18:25
•
42次下载
pid算法_什么是pid算法
PID控制器是一种最优控制。本文讲述了增量式
PID算法原理与数字
PID算法原理与数字
PID算法
程序,详细讲解了什么是
发表于01-01 11:58
•
1.1w次阅读

PID指令_程序算法_温度、压力模拟量控制_触摸屏_源程序
PID
指令,
程序算法,温度、压力模拟量控制,触摸屏。一款完整无缺的
程序,每一个
指令都有注释,值得任何初学者与中等学都学习。强烈建议。
发表于11-05 18:10
•
13次下载
C51单片机的PID程序编写
//主
程序====================================================== #include “Main.h” #include
发表于12-04 14:53
•
5490次阅读
逆变电源PID程序
逆变电源
PID
程序(共享单车的锁电源)-该文档为逆变电源
PID
程序简介文档,是一份很不错的参考资料,具有较高参考价值,感兴趣的可以下载看看………………
发表于07-26 14:29
•
39次下载







 工商网监
工商网监
评论