 步进电机的结构及控制原理
步进电机的结构及控制原理
工业现场中有大量的步进电机应用,比如自动化控制,机器人关节,打印机控制等等。其中应用最广泛的是 混合式步进电机 ,也是我们日常接触到的绝大部分步进电机的形式。在概念上,步进电机和变磁阻电机也存在一定的联系和差别,本文就初步浅谈一下磁阻电机/步进电机的结构和工作原理,并且比较一下不同电机之间的差别。
1、变磁阻电机
变磁阻电机(Variable-Reluctance Machine)也被称为开关磁阻电机,也许是所有电机结构中最简单的电机,由装有励磁绕组的定子和具有凸极结构的铁磁转子构成。转子没有线圈绕组以及永磁体,依靠转子在不同位置磁阻的变化产生电磁力(dΨ/dθ)。
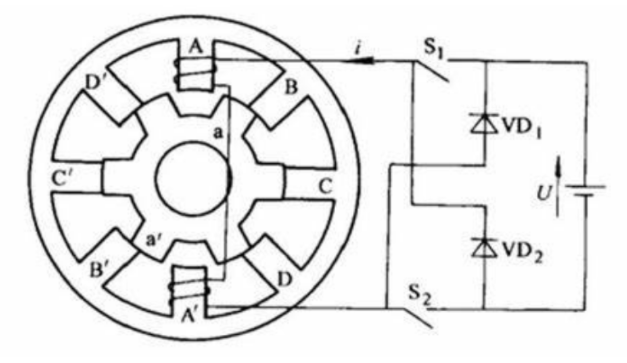
我们知道, 磁通总是倾向穿过磁阻最小的路径。 如图1.1所示,S1 S2控制电流开启和关断,VD1 VD2 为电流的续流二极管。图示位置中AA'和aa'的位置磁阻最大,CC'的磁阻最小,如果此时D相通电,转子将逆时针旋转;如果此时B相通电,转子将顺时针旋转;如果此时A相通电,转子保持维持不变。需要注意的是,开关磁阻电机 无法通过电流方向的改变实现电机转动方向的改变 ,而是通过改变通电时序的变化实现电机的正反转。
顺时针旋转通电顺序:B-A-D-C
逆时针旋转通电顺讯:D-A-B-C
由于电机在转动过程中磁阻的变化剧烈,因此磁阻电机的转矩****脉动将变得很高,为了保证电机能够平稳高效的运行,控制磁阻电机需要知道转子的位置,负载的状态,速度的状态等信息。并且磁阻电机的模型没有永磁同步电机/异步电机有很好 线性度 ,需要大量的预测模型和算法进行控制精度的提升,这无疑是增加了磁阻电机控制的难度。

图1.1 变磁阻电机的基本结构
2、从变磁阻电机到步进电机
变磁阻电机由于其特殊的控制方式(脉冲式交替导通),增加定子和转子的突极数量或者增加定子的 通电相数 ,可以将移动角度进行细分。这种细分的结构有很多种,角扭矩特性也不一样,就不展开进行讨论。本文将探讨几种常见的变磁阻电机机构,从不同的维度看看步进电机是如何从千变万化的变磁阻电机结构中脱颖而出的。
2.1 城堡式变磁阻电机
前面说到增加突极数量,可以将移动的角度进行细分,但是越多的突极将会占用大量的线圈空间,电机绕线效率降低,不能无限制的增加突极。在驱动相数不变的情况下,通过在突极上刻上一个个小齿,同样可以将机距角进行细分。如图2.1所示,为 三相城堡式变磁阻电机 ,定子为6极,每极4齿,转子为28极。依次对线圈1,线圈2,线圈3进行通电,可以驱动转子旋转,每一步的步进距离为2β/3。β值需要根据电机设计的齿槽比进行设计,这里不展开讨论。
这种电机一般应用在低速、大扭矩和精密角度分辨率的场合,这种结构已经可以称为“ 步进电机 ”,因为该电机的控制以及可以 脱离位置检测 ,通过脉冲序列驱动就能实现比较平稳的控制。

图2.1 三相城堡式变磁阻电机
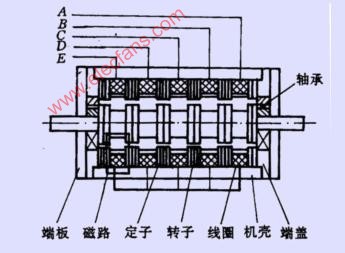
2.2 多段式变磁阻电机
由单个转子和具有多相绕组构成的变磁阻电机,也被称为“ 单段式变磁阻电机 ”。另外一种变磁阻电机是将转子和定子分为很多段,可以在不增加定子相数的情况下进行细分,并且对 定子的绕线结构更友好 ,可以设置一段一相,几乎取消的多相电机互绕的端部。对于n段电机,各段的转子或者定子错开其极距角的1/n,可将极距进一步进行n倍细分。
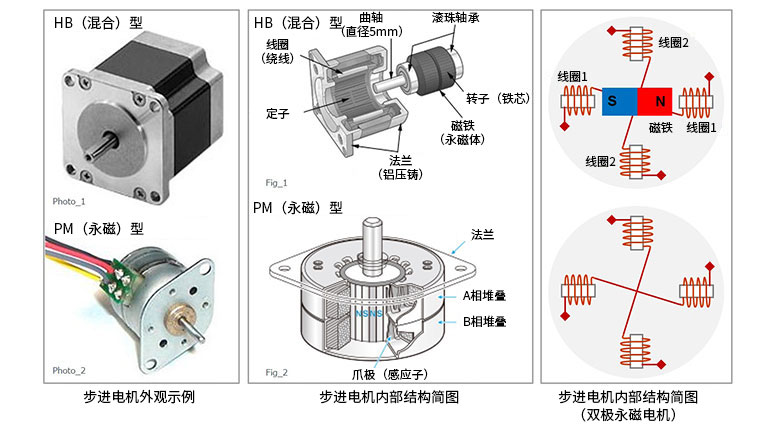
2.3 混合式步进电机
单纯的变磁阻电机,旋转的方向取决于 脉冲电流的时序和电机磁阻结构 ,而不受电流方向的影响。在不通电流的情况下,由于没有磁阻 转矩 ,转子不能固定在特定的位置,这将进一步增加控制的难度。在原有的开关磁阻电机的结构基础上加入永磁体,构成永磁式或者混合式变磁阻电机,能够显著提高步进电机的转矩和位置精度,这也是目前最常见的步进电机的结构。
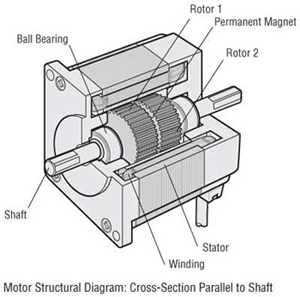
如图2.2所示,混合式步进电机结构上很像多段式变磁阻电机,在转子的两段之间插入永磁体,可以看出在近端为N极远端为S极。定子可以设计为单段电机的结构,并且 只需要两相驱动 ,大大简化了电机结构和成本。图示电机的转子极对数为3,因此一个电周期对应的机械角度为360/(2*3)=60。
为了便于理解,θ为机械角度,具体的驱动顺序:
- θ=0~10,相1和相2 同时通幅值相等的正电流
- θ=10~20,相2单独通正电流
- θ=20~30,相1单独通负电流
- θ=30~40,相1和相2 同时通幅值相等的负电流
- θ=40~50,相2单独通负电流
- θ=50~60,相1单独通正电流
- 循环导通……

图2.2 混合式步进电机结构
3、步进电机的控制
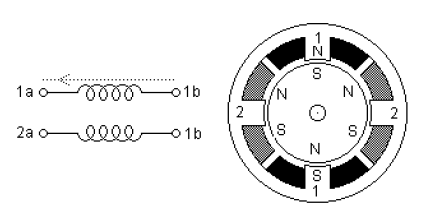
如图3.1所示,步进电机的驱动电路结构一般可以分为双极性电机和 单极性电机 :单极性电机通过绕组的交替导通实现磁通方向的改变,双极性电机通过H桥的控制实现电流方向的改变,从而实现磁通方向的改变。
单极性电机只需要4颗****功率 MOS ,对电流进行单极控制(从MOS管角度),但是电机绕线上需要多一个抽头;双极性电机在结构上更简单,两个绕组利用率高,但是需要增加到8颗功率MOS进行驱动,控制器的成本会上升。
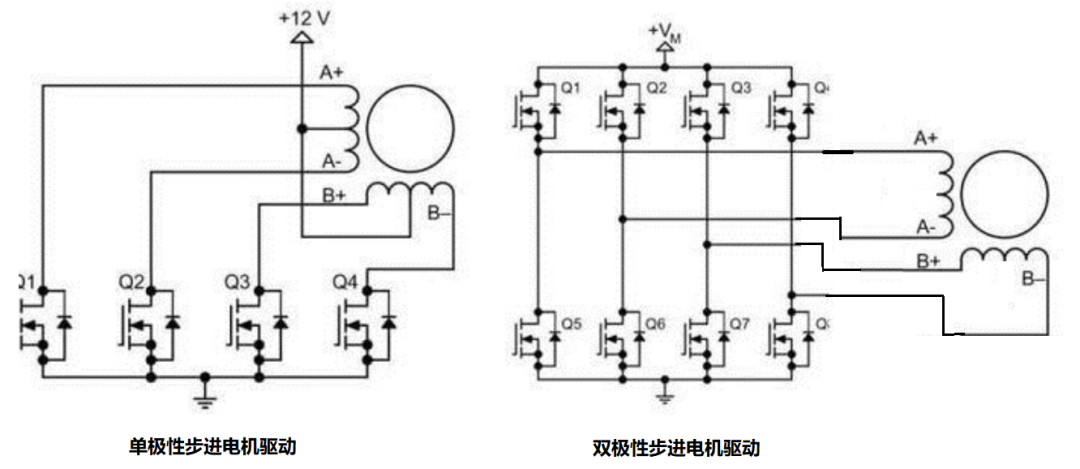
图3.1 单极性和双极性步进电机驱动
步进电机除了在电机结构上进行细分,还可以通过控制电流的波形来控制步进电机的细分精度。细分的原理是在最小的步距角之间插入vwin 出来的正弦波电流,以对步距角进行细分,该细分方式也称为 电流细分 。
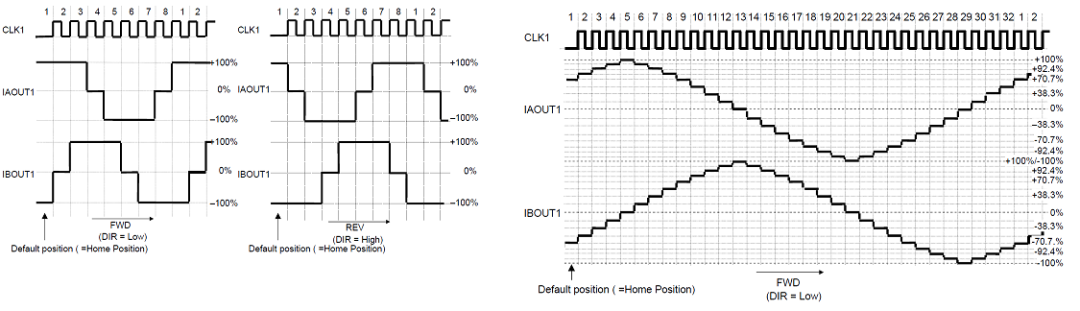
图3.2 步进电机驱动电流的细分
3.1 电流闭环
步进电机的电流的设定需要根据负载的需求的进行确定, 负载越大需要的驱动电流越大 ,但是开环控制的步进电机无法感知负载的大小,往往造成了开环驱动的效率不高。电流细分需要对电流进行精确的控制,需要形成受控电流的闭环,也即是 电流输出为恒流特性 ;另一方面,由于步进电机中的磁阻变化的非线性,需要时刻监控输出电流的大小防止由于铁芯饱和导致电流的失控。如下图3.3,为步进电机驱动芯片TB67S109AFNG对电流控制的波形原理图。Fchop为内部开关周期,通过内部时钟(Internal OSC)分频得到。
具体的恒流控制步骤如下:
- H桥导通,电流迅速上升至NF,电流上升的斜率为VDC/Ls
- 到达设定的电流点NF,关断H桥,电流通过续流二极管进行续流,下降的斜率为-VDC/Ls(Fast变化)
- 当电流到达设定点下线值,控制H桥进行电感线圈短路(一般为下桥),保持电流不变(Slow变化)
- 当电流的设定点发生变化,H桥通过相同的控制策略控制电流在最新的电流设定点保持恒定
如图 3.4所示,是步进电机的实测波形,如果细分的精度较低可以看出明显的 阶梯状电流波形 ,。如果细分的程度很高,那么电流就越接近于正弦电流,如图3.5所示。

图3.3 TB67S109AFNG电流控制

图3.4 步进电机实测电流(未细分)

图3.5 步进电机实测电流(细分)
3.2 开环控制和闭环控制
开环控制,由于不反馈转子位置信息,本质上是 不知道系统是否被控制跟随的 。如果存在一些负载异常突变,很容易造成 步进电机的丢步 。在一些高精度、高性能的应用场合,可以通过编码器或者其他的位置传感器回传位置信息,这样在可以步进驱动系统是否已经发生丢步,如果丢步将补发丢失的脉冲,在控制上也是比较容易实现的。

图3.6 闭环步进控制系统
小结
本文简述了变磁阻电机的基本结构及其向步进电机的演变,比较了几种常见的步进电机结构及控制逻辑。介绍了步进电机控制原理及电流细分的控制细节,对步进电机具有比较全面的了解。
审核编辑:刘清
-
机器人
+关注
关注
211文章
28379浏览量
206906 -
步进电机
+关注
关注
150文章
3109浏览量
147443 -
磁阻电机
+关注
关注
1文章
31浏览量
8390 -
可变磁阻
+关注
关注
0文章
6浏览量
5930
发布评论请先 登录
相关推荐
双极性步进电机的基本结构







 工商网监
工商网监
评论