 凤凰动力AGV舵轮AGV驱动轮结构及工作原理详解
凤凰动力AGV舵轮AGV驱动轮结构及工作原理详解
AGV舵轮是一种用于控制AGV行驶方向的重要部件。它通常由电机、减速箱、回转支承、轮子、齿轮和轴承等配件组成。
●AGV舵轮的工作原理是:通过电机驱动齿轮转动,齿轮再带动轴承和轮辋一起旋转,从而使整个舵轮转动。当AGV需要改变行进方向时,控制系统会发送信号给舵轮电机,使其旋转到相应的角度,从而改变车体的行进方向。
●由于AGV舵轮具有灵活性和精度高等特点,因此在自动化物流、智能制造等领域得到了广泛应用。
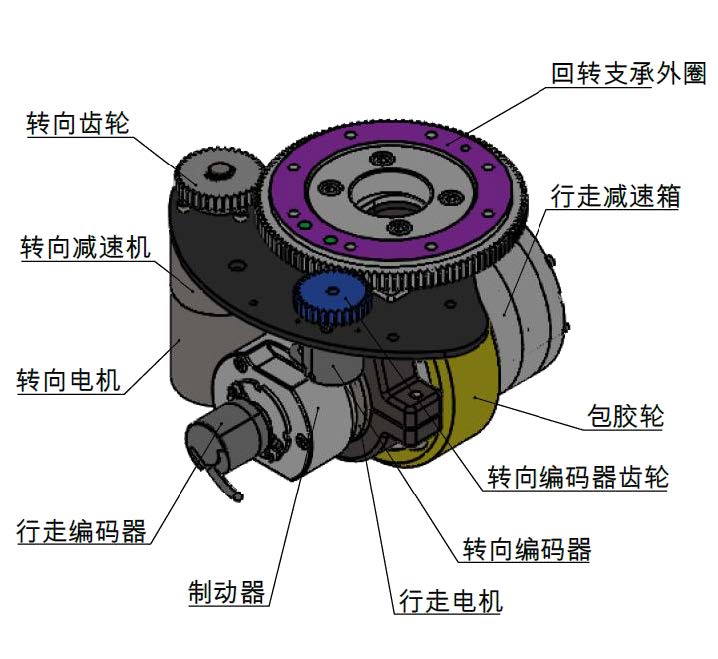
AGV舵轮基本组成机构
●舵轮总成基本组成机构:行走机构和转向机构。
●行走机构包含:行走电机、行走减速箱、包胶轮、制动器、反馈单元。
●转向机构包含:回转支承、转向齿轮、转向减速机、转向电机、电子限位、机械限位装置、反馈单元。
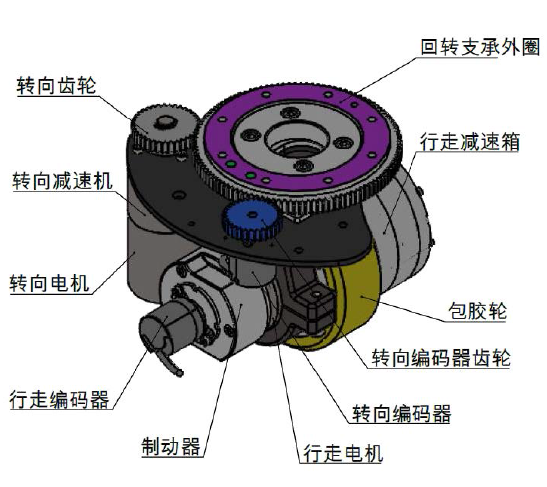
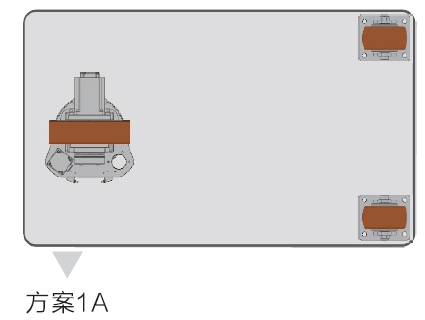
结构示意图1
●行走电机:行走电机与行走减速箱连接,电机工作产生的扭矩,通过行走减速箱放大,在包胶轮上输出车辆前进所需的扭矩,包胶轮与地面摩擦产生推力,推动车辆前进或后退。
●制动器:制动器用于停车后驻车制动,防止车辆或设备移动;严禁电机转速高于100rpm 时制动。图中行走电机和制动器同轴,与电机转速相同,制动器制动后扭矩直接作用于电机轴。图中回转支承外圈,安装在车体上与车体相对固定;舵轮转向时,其他部件绕回转支承中心转动。图中回转支承是舵轮与车体安装连接的部件,安装面位于回转支承外圈,见紫色显示部分;安装孔为8 个M8 的螺纹孔(见结构示意图2)。
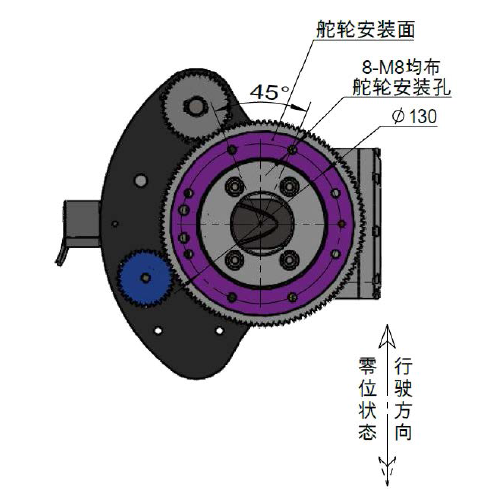
结构示意图2
如图所示,舵轮0位状态使用时,车辆直行,在舵轮驱动力作用下可以实现前进和后退。通过控制转向电机,可调整舵轮行进方向。
车辆需要转向时,控制程序控制转向电机转动,转向电机的扭矩经过转向减速箱、转向齿轮传动,使得舵轮的行进方向达到预设的偏转角度,配合行走部分产生的推力,实现车辆的转向、横移、原地转向等功能。
图中限位螺栓(见结构示意图3)固定在回转支承外圈的下部,用于舵轮转向时先后触发电子限位和机械限位。
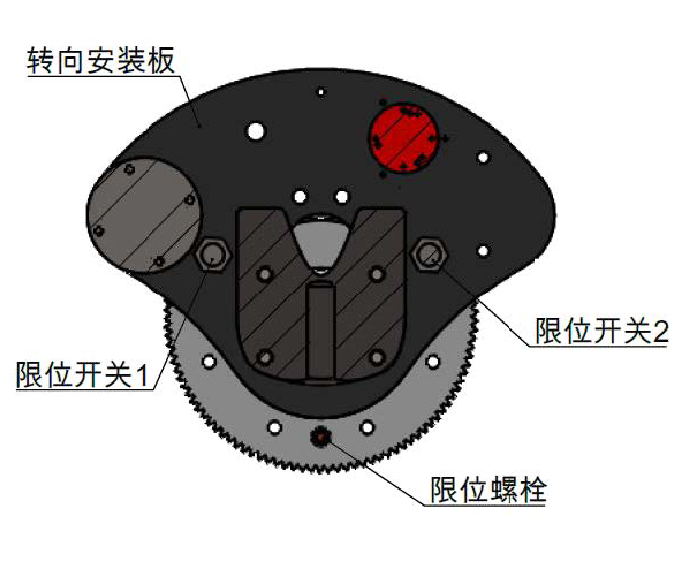
●右侧限位开关在舵轮向右转向时,到达限位角度会检测到限位螺栓,触发右侧电子限位。
●左侧限位开关在舵轮向左转向时,到达限位角度会检测到限位螺栓,触发左侧电子限位。
●正常工作和运行时,舵轮转向不会到达机械限位位置。为了防止电子限位失效、程序异常等情况,舵轮转向到机械限位角度时,机械限位将阻挡舵轮进一步转向。
警告:出现机械限位的状况时,转向电机电流会大幅增加,请在控制程序中设定过流保护,保护转向电机和转向机构所有配件,防止异常损坏。
图中转向反馈单元,用于反馈信号给控制程序计算舵轮的转向角度,可以是转向电机的霍尔反馈,也可以是转向编码器;行走反馈单元,用于反馈信号给控制程序计算车辆的行驶速度和距离等,可以是行走电机的霍尔反馈,也可以是行走编码器。
AGV舵轮总成工作原理综述:
●行走机构可以实现较大的扭矩输出,为车辆提供驱动力,制动器可以完成驻车制动或设备异常状况下的紧急制动;转向机构可以通过程序控制舵轮的行走方向,进而改变车辆的行驶方向,使车辆匹配导航路径进行移动。AGV 等自移动设备,安装一个舵轮可以实现前进、后退、左右转向功能,安装双舵轮或多组舵轮可以通过程序控制实现二维平面任意方向移动。
苏州凤凰动力工业有限公司创立于2005年,本部位于江苏省昆山市花桥镇金捷路1号。
我公司是国内较早专业从事AGV/AMR舵轮、电驱动轮总成研发与生产的企业,主要产品包括卧式驱动轮、卧式舵轮、立式驱动轮、立式舵轮、重载AGV专用曲轴脚轮、高精密型脚轮万向轮。电驱动轮及舵轮功率范围0.2KW~50KW、轮径范围150mm~600mm、载重范围300KG~20000KG,几乎涵盖了工业领域各类电驱动移动设备的需求,客户选型游刃有余,并且还可以满足客户个性化的定制需求,为客户打造专属化产品。
自创立以来,我公司已经为超过1800家客户提供了完整的电驱动解决方案,涉及军工、航运码头、机场、建筑、钢铁、汽车、工业车辆、纺织、机械制造、电子制造等多个行业。取得各种专利40多项,建立起电机、齿轮、驱动控制系统等核心零部件优秀的供应链基础,完成了标准化、模块化、定制化、集成化、系统化、智能化初步架构,为提供优质的OEM、ODM整体解决方案打下了坚实的基础。
我公司紧紧依托于国家工业4.0的战略布局,不断持续加大研发与技术的投入,极致追求客户效益最大化,让客户对我们“信任而敢于托付”。
审核编辑 黄宇
-
电机
+关注
关注
142文章
9000浏览量
145335 -
AGV
+关注
关注
27文章
1302浏览量
41067
发布评论请先 登录
相关推荐


你想要的AGV小车减震结构,凤凰动力都为你梳理清楚了
凤凰动力舵轮驱动轮的稳定性如何影响AGV的运行效率和稳定性

凤凰动力AGV舵轮大揭秘!
驱动轮舵轮专家-凤凰动力详细介绍AGV部署攻略,发掘“无人工厂”的无限可能
凤凰动力为你详解AGV舵轮的工作原理








 工商网监
工商网监
评论