 Haptics系统的工作原理和ERM/LRA的特点
Haptics系统的工作原理和ERM/LRA的特点
Haptics系统通过触觉反馈来实现人机交互,用户通过点触屏幕即可完成短信、打字、游戏等各种应用,得益于其简单方便的交互体验,Haptics已经成为了智能手机、平板电脑中广泛应用的人机交互方式。
Introduction
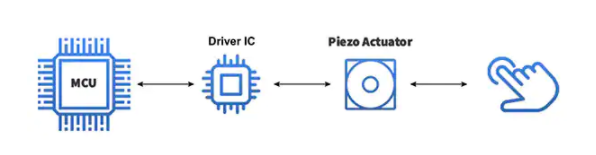
针对不同的应用场景,手机厂家会设计不同的效果波形,当屏幕控制器感应到用户的某种Touch操作后,触发Processor生成一个对应的振动指令和驱动波形给Haptics Driver IC,Driver IC对驱动波形进行放大和修正后,驱动Actuator执行对应的振动效果。
Haptics系统主要由以下几部分组成:
Processor:终端设备的处理器,当Processor接收到触觉触发信号时,会生成对应的振动指令和振动效果波形发送给Haptics Driver IC,将振动指令和效果传达出去。
Haptics Driver Solution:Haptics驱动方案,对Processor产生的振动波形进行放大和修正后,驱动Actuator产生振动。针对不同的Actuator,Haptics Driver Solution有所不同,除了相应的Driver IC,还包括必要的软件或算法程序,下文将会展开介绍。
Actuator:振动发生器,是Haptics系统中最为关键的一环,生成振动效果反馈给用户,是将电能转换为机械能的过程。常用的Actuator通常可以分为三大类:偏心转子马达(Eccentric Rotating Mass: ERM)、压电马达(Piezo)、线性谐振马达(Linear Resonant Actuator: LRA),根据振动方向的不同,LRA又分为Z轴LRA和X轴LRA。由于Piezo采用特殊压电材料制成,价格相比ERM和LRA要昂贵许多,在终端设备中很少使用,本文不作讨论。
2. EMR
如图2所示,ERM主要由四个部分组成,图片最左侧的偏心转子质量块用于产生振动;右上方的磁铁、马达壳、螺钉和主轴承组成ERM的定子组件;中间的无芯绕组、转向器电机轴组成ERM的电枢组件;下方的端盖组件用于固定和连接。将ERM固定在终端设备上,即可将偏心转子旋转所产生的振动频率和强度传递给终端设备。
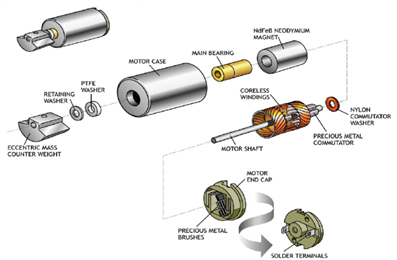
Figure 2, Eccentric Rotating Mass
ERM体积和重量都比较大,利用离心运动产生振动效果,震感比较强烈,并且振动频率可以从1Hz到300Hz,方案简单,价格低廉。
然而,ERM的构造决定了它的固有缺点:首先,ERM的驱动波形为DC波形,通常随着输入电压增大,ERM的振动增强,但由于ERM体积和重量都比较大,需要驱动电压大于一定值时,才能开始振动,因此相比于其他类型的Actuator,ERM的功耗通常较大;第二,ERM利用离心运动产生振动效果,振动响应速度慢,起震和停止的速度都比较慢,触觉体验不好。
针对ERM的特点,TI提供了多种Driver Solution,Driver芯片集成了Overdrive过载驱动和Brake刹车功能[2],能够减小ERM的起震时间和停止时间,改进ERM的触觉反馈效果,如TI的DRV2603/DRV2604/DRV2605等Haptics Driver IC,具体设计方案可以参考DRV2605的Evaluation Kit。
3. LRA
LRA可以被认为是质量弹簧系统,该系统的质量系统在AC驱动信号的驱动下进行线性运动,产生所需的触觉反馈振动效果。不同于以DC电压进行驱动的ERM,LRA需要由AC信号驱动。若LRA在驱动信号作用下沿Z轴振动,即为Z轴LRA;若LRA在驱动信号作用下沿X轴振动,则为X轴LRA。相比ERM,LRA的体积更小,重量更轻,振动响应速度快,起震和停止的时间都很短,触觉反馈体验更加清脆。
图3为LRA系统的频率响应,组成LRA的质量弹簧系统是一个Q值很高的谐振系统,偏离谐振频率的频率响应急剧下降。如图3所示,LRA共振频率可能由于制造公差和环境因素等变化而变化。因此,为了达到最大的振动强度,需要确保其驱动频率始终能跟踪LRA的谐振频率点。
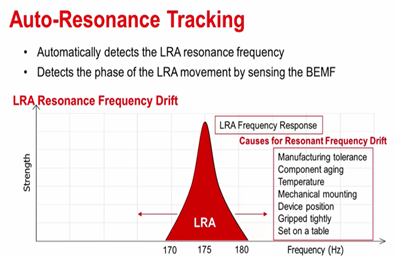
Figure 3, LRA Frequency Response
TI的Haptics Solution使用Auto-F0 Tracking算法检测LRA的谐振频率F0,使驱动信号的频率跟踪LRA的谐振频率F0,以实现LRA更好的振动效果。下面以TI针对Z轴LRA的Haptics Solution为例,介绍TI Haptics Solution使用的Auto-F0 Tracking算法如何工作。
3.1 Z轴LRA
如图4所示,Z轴LRA的主要由5部分组成:移动质量块、弹簧、音圈、磁铁以及端盖组件,通过音圈的电流在移动质量块上施加机械力使质量块上下移动,驱动LRA振动[1]。因为图4所示LRA在驱动信号作用下沿着Z轴方向振动,故称Z轴LRA。
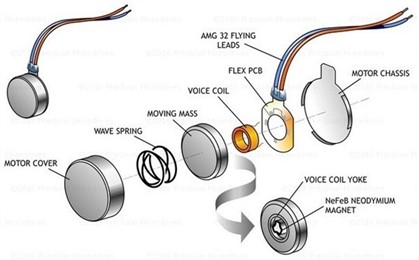
Figure 4, Z-axis LRA
TI的 DRV260X系列Haptics Solution可以直接用于Z轴LRA,集成了LRA驱动所需的Auto-F0 Tracking算法。以图5所示的DRV2605为例,Auto-F0 Tracking是以Back-EMF检测模块为核心构成的闭环控制算法[2]。
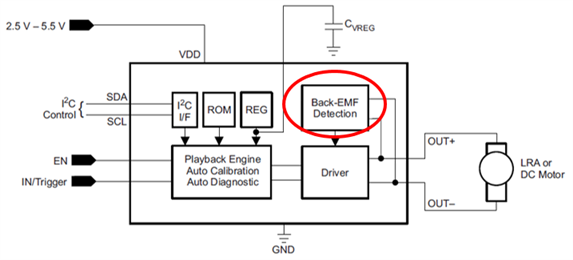
Figure 5 DRV2605 Block Diagram
Auto-F0 Tracking的原理如下:Haptics Driver施加在LRA音圈的电流将在LRA内部质量块上产生机械力,驱动LRA线性振动,随着LRA内部质量块的移动,LRA音圈相对于磁场的移动也将产生反向电动势(Back-EMF),图5中DRV2605的Back-EMF模块将检测LRA产生的Back-EMF电压,根据Back-EMF电压与频率特性的对应关系可以确定LRA系统的谐振频率F0。
通过Auto-F0 Tracking得到的F0频率,一方面可以应用于驱动振动的波形频率,得到更有效的振动;另一方面,也可以直接应用于与驱动振动的信号反相的刹车信号,使振动停止非常迅速。这种Auto-F0 Vibration & Braking机制最终使Haptics系统得到清脆不拖沓的触觉反馈效果。针对Z轴LRA的Haptics Solution可以参考DRV2605, http://www.ti.com/lit/ds/symlink/drv2605.pdf。
3.2 X轴LRA
相比ERM,Z轴LRA的振动效果已经有很大提升,但是由于Z轴LRA振动方向沿着Z轴,即上下振动,在厚度比较薄的终端设备中,振动幅度受限,而X轴LRA则解决了这一限制。
如图6所示,X轴LRA一般为矩形,主要由5部分组成:移动质量块、音圈、磁铁、弹簧和端盖组件。弹簧连接在质量块的左右两侧,因此LRA振动在X平面,具有更大的振动空间,可以达到更大的振动幅度。
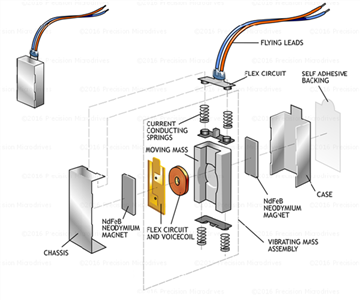
Figure 6, X-axis LRA
和Z轴LRA类似,X轴LRA频率响应的Q值非常高,因此也需要Auto-F0 Tracking来完成驱动信号频率对LRA谐振频率的追踪。除此之外,由于X轴LRA振动在X轴方向,具有更大的振动幅度,因此需要更高的驱动电压。
TI提供Smart Amp作为X轴LRA Haptics Driver的Solution。一方面,Smart PA内部集成了BOOST结构,能够提供X轴LRA需要的高驱动电压;另一方面,Smart PA集成了IVsense Feature可以检测LRA的Back-EMF电压[3],通过图7所示的算法结构完成LRA谐振频率F0的追踪和驱动波形频率校准。
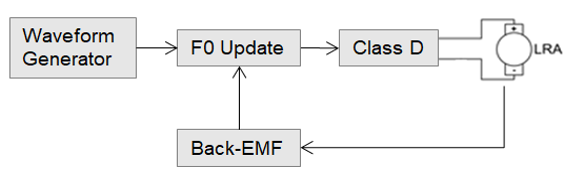
Figure 7, Auto-F0 tracking for X-axis LRA
4.Summary
综上所述,本文详细介绍了Haptics系统的工作原理和ERM/LRA的特点,针对不同的Actuator,TI提供全方位的Haptics Solution,包括Haptics Driver IC和相应的Driver Algorithm。随着智能手机越来越薄,我们可以预见的是X轴LRA会得到越来越多的应用,以帮助用户获得更好的触觉反馈体验。
审核编辑:郭婷
-
人机交互
+关注
关注
12文章
1206浏览量
55380 -
智能手机
+关注
关注
66文章
18477浏览量
180101 -
平板电脑
+关注
关注
4文章
2016浏览量
77724
发布评论请先 登录
相关推荐
ERM 和 LRA 触觉参考设计,具有 Bluetooth® 低能耗远程
支持触觉的游戏控制器设计
ERM 和 LRA 触觉参考设计,具有 Bluetooth® 低能耗远程
线性谐振传动器如何工作?
ERM&LRA触觉驱动程序
基于DRV2605高级触觉驱动器可简化消费类和工业类产品的触觉反馈设计包括原理图和物料清单
基于ERM和LRA触觉驱动器的具有Bluetooth低能耗远程的参考设计
适用于LRA和ERM电机的DRV2605触觉驱动器参考设计
Haptics系统介绍
带有针对线性谐振制动器(LRA)自动谐振跟踪和针对离心旋转质量制动器(ERM)优化驱动的触控反馈驱动器

探讨新型压电触觉执行器相比 ERM 和 LRA 的优势
ERM和LRA触觉参考设计 具有Bluetooth reg低能耗远程

从ERM到X-axis LRA,TI为你提供全面的Haptics Solution
开源硬件-TIDA-00266-ERM 和 LRA 触觉 PCB layout 设计,具有 Bluetooth® 低能耗远程
DRV2625 ERM、LRA触觉反馈驱动器评估套件





 工商网监
工商网监
评论