 步进电机常见丢步原因分析及解决方法
步进电机常见丢步原因分析及解决方法
在一些自动控制领域中,步进电机的使用仍占着相当大的比例,步进电机与驱动电路组成的开环数控系统,因其简单的结构、低廉的价格和可靠的性能,目前已在很多行业中(工业自动化、医疗自动化、纺织自动化等)广泛应用。
步进电机经常被用于精确定位的场合,因而保证电机不发生失步至关重要。
如果在调试过程中会发现步进电机丢步、堵转和定位不准现象,遇到这种情况不要着急,
更不要因此直接否定所选用步进电机,一定要冷静观察分析出现该现象的原因,由此找出解决之道!
步进电机的丢步及定位不准,一般由以下几方面原因引起:
1、 改变方向时丢脉冲,表现为往任何一个方向都准,但一改变方向就累计偏差,并且次数越多偏得越多;
2、 启动速度太高,加速度太大,引起丢步;
3、 在用同步带的场合软件补偿太多或太少;
4、 步进电动机本身的工作转矩不足,没有足够的能力来驱动负载;
5、 控制器受干扰引起误动作;
6、 驱动器受干扰引起;
7、 软件缺陷;
针对以上问题分析如下:
1)一般的步进驱动器对方向和脉冲信号都有一定的要求,如:方向信号在第一个脉冲上升沿或下降沿(不同的驱动器要求不一样)到来前数微秒被确定,
否则会有一个脉冲所运转的角度与实际需要的转向相反,最后故障现象表现为越走越偏,细分越小越明显,解决办法主要用软件改变发脉冲的逻辑或加延时。
2)由于步进电机特点决定初速度不能太高,尤其带的负载惯量较大情况下,建议初速度在1r/s以下,
这样冲击较小,同样加速度太大对系统冲击也大,容易过冲,导致定位不准;电机正转和反转之间应有一定的暂停时间,若没有就会因反向加速度太大引起过冲。
3)根据实际情况调整被偿参数值,(因为同步带弹性形变较大,所以改变方向时需加一定的补偿)。
4)适当地增大马达电流,提高驱动器电压(注意选配驱动器、驱动芯片)选扭矩大一些的马达。
5)系统的干扰引起控制器或驱动器的误动作,我们只能想办法找出干扰源,
降低其干扰能力(如屏蔽,加大间隔距离等),切断传播途径,提高自身的抗干扰能力,
常见措施:
①用双纹屏蔽线代替普通导线,系统中信号线与大电流或大电压变化导线分开布线,降低电磁干扰能力。
②用电源滤波器把来自电网的干扰波滤掉,在条件许可下各大用电设备的输入端加电源滤波器,降低系统内各设备之间的干扰。
③设备之间最好用光电隔离器件进行信号传送,在条件许可下,脉冲和方向信号最好用差分方式加光电隔离进行信号传送。
在感性负载(如电磁继电器、电磁阀)两端加阻容吸收或快速泄放电路,感性负载在开头瞬间能产生10~100倍的尖峰电压,如果工作频率在20KHZ以上。
6)软件做一些容错处理,把干扰带来影响消除。
同时还可能是以下原因:
原因一:
转子的加速度慢子步进电机的旋转磁场,即低于换相速度时,步进电机会产生丢步。
这是因为输入电机的电能不足,在步进电机中产生的同步力矩无法使转子速度跟随定子磁场的旋转速度,从而引起丢步。
解决方法:
①使步进电机本身产生的电磁转矩增大。因此可在额定电流范围内适当加大驱动电流;或者在高频范围转矩不足时,可适当提高驱动电路的驱动电压;也可以改用转矩大的步进电机等。
②使步进电机需要克服的转矩减小,因此可适当降低电动机运行频率,以便提高电机的输出转矩。
原因二:
步进电机及所带负载存在惯性,由于步进电机自身及所带负载存在惯性,使得电机在工作过程中不能立即起动和停止,而是在起动时出现丢步,在停止时发生越步。
解决方法:
通过一个加速和减速过程,即以较低的速度起动,而后逐渐加速到某一速度运行,再逐渐减速直至停止。
原因三:步进电动机产生共振
共振也是引起丢步的一个原因。步进电机处于连续运行状态时,如果控制脉冲的频率等于步进电机的固有频率,将产生共振。
解决方法:
一、适当减小步进电机的驱动电流;
二、采用细分驱动方法;
三、采用阻尼方法,包括机械阻尼法。
以上方法都能有效消除电机振荡,避免丢步现象发生。
那有没有一款步进驱动芯片可以内部集成算法来优化电机性能,防止丢步呢?
针对步进电机丢步的问题,Trinamic推出的TMC5160电机驱动芯片的DcStep功能可以有效防止电机丢步。
TMC5160的DcStep功能介绍:
DcStep 能让电机在其负载极限和速度极限附近运行而不失步。如果电机上的机械负载增加到堵转负载点,电机会自动降低速度,这样它仍然可以驱动负载。
有了这个功能,电机将不会堵转。除了在较低速度下增加扭矩之外,动态惯性将允许电机通过减速克服机械过载。
DcStep 直接与斜坡发生器集成,因此即使电机速度因机械负载增加而需要降低,也能达到目标位置。
DcStep 可以在没有任何失步的情况下达到 10 倍或更大的动态范围。通过优化高负载情况下的运动速度,该功能进一步提高了整体系统效率。
DcStep 优势:
电机在过载情况下不会失步
应用程序可以更快的运行
自动实现最高的加速度
在速度极限下实现最高的能效
全步驱动达到最高电机扭矩

TMC5160 为外部增量编码器提供编码器接口。编码器不仅用于失步的判断,还可实现运动控制器的归零功能(替代参考开关)。
可编程预分频器寄存器设置了编码器分辨率以适应电机分辨率。内部包含 32 位编码器计数器。
如果对位置要求非常高的应用,又怕步进电机丢步,那就建议上闭环步进了,
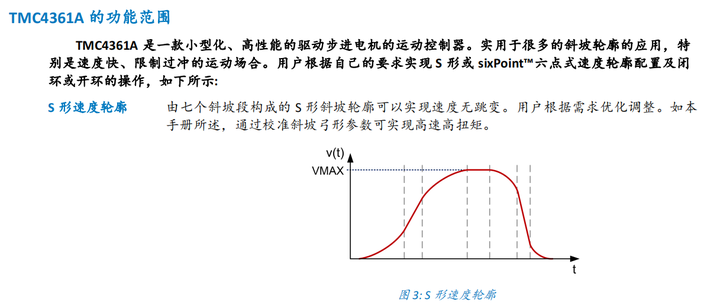
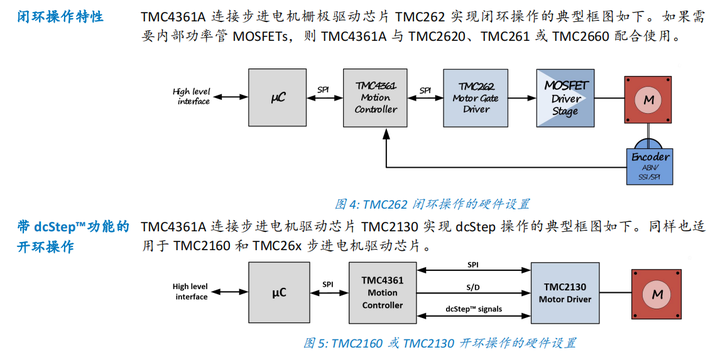
针对步进闭环应用,Trinamic推出了一款带S型加减速曲线的控制芯片---TMC4361,
并支持 sixPoint 六点式斜坡,进行了高速优化,支持动态修改运动参数。 TMC4361A 包含 SPI 接口、Step/Dir 接口及闭环所需的编码器接口。
审核编辑:汤梓红
-
步进电机
+关注
关注
150文章
3109浏览量
147443 -
驱动电路
+关注
关注
153文章
1529浏览量
108489 -
自动控制
+关注
关注
10文章
714浏览量
44152
发布评论请先 登录
相关推荐
伺服电机常见故障及解决方法有哪些
逻辑分析仪的常见故障及解决方法
服务器错误是怎么回事?常见错误原因及解决方法汇总

75FB003步进电机有几种方法
伺服电机驱动器的常见故障及解决方法
电机逆变器的常见故障及解决方法
步进伺服电机出现失步现象的有哪些原因?







 工商网监
工商网监
评论