 主轴从轴AR时的CAM运行
主轴从轴AR时的CAM运行
1_回顾及简介
上节介绍了主从轴均为Relative时的CAM测试。CamIn后,从轴马上处于InSync状态。主轴启动,从轴马上跟随启动。与主从轴的当前值无关。如先启动主轴,则执行CamIn时,从轴马上处于InSync状态,并启动CAM运行。
本节介绍主轴为Absolute,从轴为Relative时的CAM测试。
2_具体操作介绍
1. AR模式,起始值为(0,0)时的测试
在CamTableSelect中,主轴和从轴分别设置为Absolute和Relative。主从轴当前值设置为(0,0)。
执行CamIn。可发现执行CamIn后,从轴直接处于InSync状态。这是因为Cam表的起始点也是(0,0)。 与主从轴启动时的当前值重合。
2. AR模式,添加Sync测试
主从轴AR模式下,在MC_CamIn功能块上,MasterSyncPosition设置为60,MasterStartDistance设置为20。主轴当前位置设置为20.
CamIn,CamIn执行后,Active和InSync的状态均为False。因为当前(20,0)的位置与Cam表不重合。
主轴速度设置为15,启动。启动后报错。
报错原因分析:按照参数设置,主轴从40运动到60的同时,从轴要从当前位置0,运动到与主轴60相对应的从轴的位置(大概61左右)。而因为主轴速度是15,导致从轴追赶时的最大速度超过50r/s,超过了从轴最大速度,导致报警。
处理方法:
把MasterStartDistance设置为30,即留给从轴追赶的时间长一些。
把主轴速度由15降到10。由此,可减小追赶时,从轴的最大速度,使从轴的最大追赶速度不要超过50r/s。
3. AR模式,添加Sync测试,从轴追赶OK
当主轴运行到30时,Active信号置为True。即:从轴开始启动,追赶主轴。
当主轴运行到60时,InSync信号置为True。即在主轴运动到60时,从轴与主轴耦合上。此时从轴的位置为Cam表定义的,与主轴位置60对应的从轴位置(61.xx)。
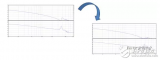
4. 结合Trace曲线分析
在Diagram 3中添加Cam_In.InSync和Cam_In.Active信号,并辅助Trace曲线分析。
通过Trace,以图表化的方式分析运动过程,更直观简捷。
-
CAM
+关注
关注
5文章
200浏览量
42970 -
工业控制
+关注
关注
37文章
1451浏览量
85828
发布评论请先 登录
相关推荐
深圳电主轴生产厂家:电主轴的操作如何做到零失误?
深圳机床主轴用哪些材质呢?
机床主轴常用轴承_机床主轴轴承安装_数控机床主轴的结构
主轴异响的问题处理说明





 工商网监
工商网监
评论