 在精密运动控制应用中最大限度地减少步进电机噪声和振动
在精密运动控制应用中最大限度地减少步进电机噪声和振动
步进电机在广泛的应用中运行良好,但可能会遇到转矩脉动和电流失真问题。了解 QuietStep,这是 Allegro MicroSystems 的专有算法,作为可能的解决方案。
在许多应用中,步进电机比直流 (DC) 和无刷直流 (BLDC) 电机具有独特的优势。双极步进器提供精确的开环位置以及零速扭矩,无需使用控制回路或外部传感器。凭借其受控步进功能,步进电机适用于各种精密运动控制应用,包括闭路电视 (CCTV)、3D 打印机、计算机数控 (CNC)、纺织制造设备和拾取和放置机器。
成功部署步进电机需要有效管理噪音和振动。例如,在闭路电视应用中,振动直接转化为图像传感器和万向节。大变焦与移动相结合会使图像失真。在3D打印中,由高扭矩脉动引起的电机共振或过冲会导致许多不必要的打印伪影。在大多数情况下,减少电机振动可以带来更好的图像质量或更精确的3D打印。减少电机振动还可以实现更安静的整体运行。
基于专有算法的先进技术现在可用于通过减少转矩纹波和电流失真来最大限度地减少步进电机设计中的噪声和振动。在深入研究这些运动控制解决方案之前,了解导致振动和可听噪声的原因很有帮助。首先,让我们仔细看看步进电机是如何工作的。
步进机基础知识
双极步进电机是一种具有离散极位置的直流电机,由多线圈组成,分为两组,称为相位。两相之间的电流比决定了转子在两个绕组之间的位置。通过这种方式,步进电机可以在两极之间将其位置划分为较小的增量,称为微步。
每个步进电机绕组中的电流可以相加以创建一个矢量,其中矢量的大小是扭矩。通过检查极空间中两个相位中每个相位的电流,我们可以可视化矢量在每个电周期中旋转时。
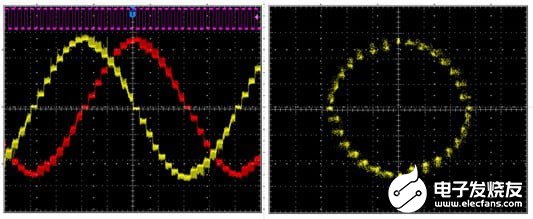
图1.
双极步进电机的两个绕组中的相电流均为 1/8(左)。双极步进器的两个绕组中的相电流为1/8步长,但以极性域表示(右)。
在基于时间的域中(图1左),扭矩定义为两条曲线下面积的总和。在极性域(图1右)中,矢量的大小是扭矩。在这些图像中,我们可以看到,当磁场通过每个电周期移动时,扭矩是恒定的。当扭矩不恒定时,系统会经历振动和可听噪声。
假设电机未在谐振时运行,转矩脉动将成为步进电机中可听见噪声和振动的最大来源。
控制步进电机(电流控制)
脉宽调制(PWM)电流控制是驱动步进电机的最常见方式。通过实施电流控制,控制器PWM斩波输出,限制每个绕组中的电流,以保持定义转子位置的比率。
PWM电流控制的性质导致基于施加的占空比,电机电感和两端电压的电流纹波。为了将纹波降至最低,控制器可以通过实施各种衰减模式来管理绕组中电流的减小方式。
让我们回顾一下从驱动电流斜坡上升开始的单个PWM周期的常见衰减模式。
在驱动之后(如图2A所示),衰减模式在PWM关断时间内通过图2B和2C所示的两种同步方法实现。
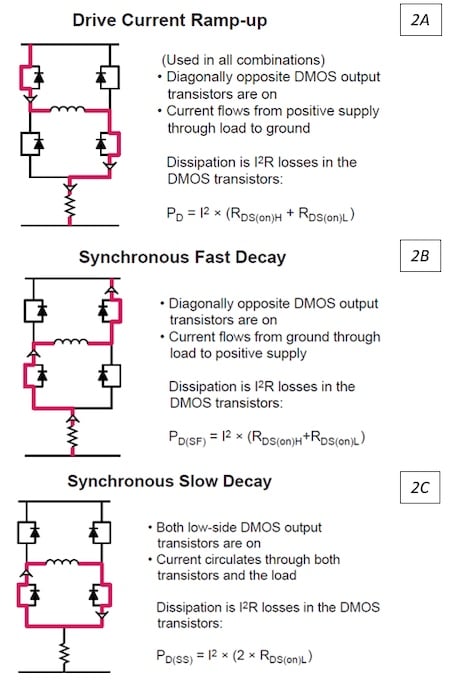
图2.
全桥电流路径显示驱动和衰减模式。
快速衰减可提供最佳的电流控制,但会导致高纹波。缓慢衰减会产生低纹波,但衰减速率受电机反电动势 (BEMF) 的影响,在某些情况下,这会导致电流失真。
图3A显示了使用100%慢衰减时会发生什么。当绕组电流下降时,缓慢衰减不能足够快地降低电流,从而导致下降沿失真。图3B显示了使用100%快速衰减的效果。纹波电流要大得多,但控制器可以保持对电流的精确控制。
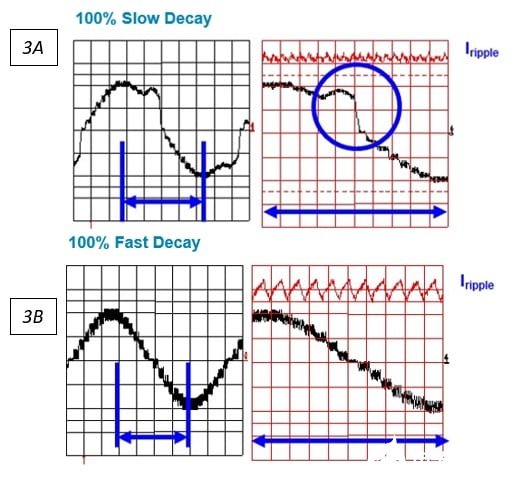
图 3A.
当负载电流减小时,缓慢衰减会产生失真。
图 3B.
快速衰减会导致较大的纹波电流,从而导致振动和可闻噪声。
我们可以避免图1所示的影响,并通过达成折衷方案来保持合理的纹波电流。当负载中的电流减小时,驱动器实现快速衰减和慢速衰减的组合,称为混合衰减。关断时间分为一部分快速衰减和一部分慢衰减,如图4所示。当负载中的电流增加时,缓慢衰减可将纹波降至最低。
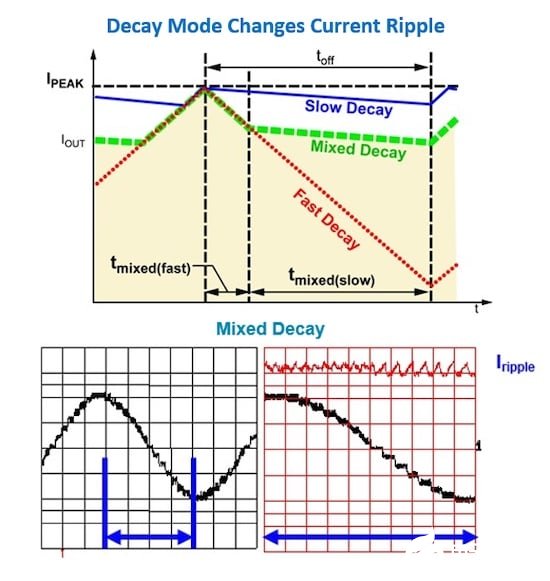
图4.
混合衰减可最大限度地减少纹波,同时保持对绕组中电流的控制。
根据步进电机的特性及其LR时间常数,上升沿的缓慢衰减可能会在低电流下产生问题,其中电流变化率太快,PWM控制器由于电流检测放大器消隐而无法调节到低电流。当负载中的电流增加时,这种情况会导致电流失真,如图5所示。
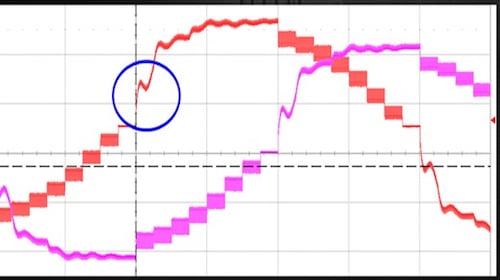
图5.
上升沿的缓慢衰减会导致具有某些LR特性的电机失真。
很难实现适用于所有双极步进电机的简单折衷方案。为了解决这些问题,同时保持尽可能低的纹波,系统必须适应不同的电机特性。
降低转矩脉动的新方法
Allegro 推出了一种减少步进电机应用的转矩纹波和电流失真的方法。这项名为 QuietStep 的创新现在可作为 Allegro 最新 A5984 步进电机驱动器的选装件提供。
QuietStep技术使用专有算法,该算法可以逐周期动态调整(向上或向下)所需的快速衰减百分比,以便在所有操作条件下实现最佳性能,而无需使用复杂的软件。
该算法通过首先实现慢衰减,然后实现快速衰减来扭转混合衰减的传统方法。图6A显示了传统的混合衰减,其中固定部分为快速衰减和慢速衰减,快速衰减启动PWM关断时间周期。图6B显示了在PWM关断时间周期开始时使用QuietStep时缓慢衰减的开始情况。QuietStep自动调整快速衰减和慢速衰减的比率,以最小化电流纹波,同时保持精确的电流调节。
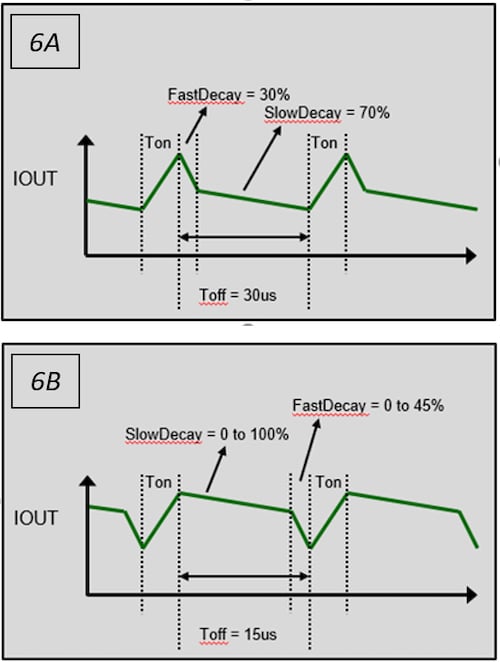
图 6A.
传统的混合衰变,其中快速和慢速衰减的比例是固定的。
图 6B.
QuietStep可以动态调整快衰减和慢衰减的比例,以保持电流控制并最小化电流纹波。
仅在需要电流调节时才引入快速衰减,从而产生尽可能低的纹波电流。图7显示了随着电流减小的固定混合衰减和电流随着电流的增加而缓慢衰减而导致的电流控制丧失产生的高纹波电流。与混合衰减相比,QuietStep技术通过将纹波电流降低一半来消除这些影响。当电流增加时,QuietStep 将电流调节保持在零安培。
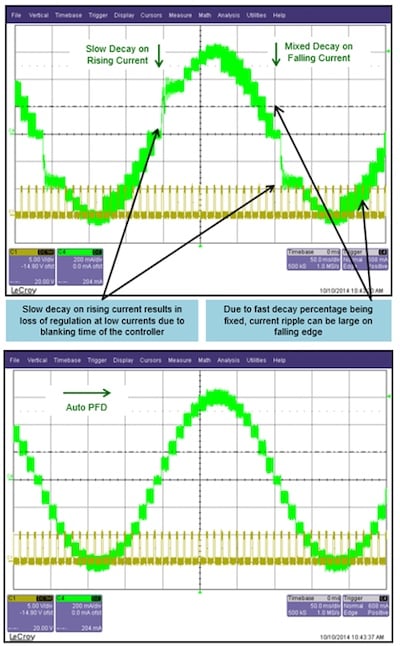
图7.
传统的电流增加时的缓慢衰减和电流减小的混合衰减导致电流增加时失去调节,随着电流的减小而产生较大的纹波。QuietStep 在电流增加时提供出色的电流调节,同时在整个电气周期内保持低纹波电流。
降低系统级电流纹波和谐振可最大限度地减少振动以及振动引起的可听噪声。结果是在闭路电视系统中实现更好的视频成像,在3D打印机中实现卓越的打印质量。
减少可听噪声和振动几乎增强了所有电机控制应用,从家庭自动化门锁和阀门控制到精密视觉系统和 3D 打印。Allegro 的 QuietStep 技术消除了尝试确定系统中噪声和振动源的麻烦。QuietStep完全集成到IC中,易于实现,无需编程或外部组件,并且是全自动的。
部署带双极步进电机驱动器的 QuietStep
借助支持这种先进技术的微步电机驱动器(如 Allegro A5984),电流波形可在各种步进电机速度和特性范围内自动优化。步进电机驱动器解决方案配备QuietStep技术,可在PWM周期内动态调整快速衰减量,以最大程度地减少各种工作条件下的电流纹波。
QuietStep 功能可提高系统性能,从而降低电机噪音、降低振动并提高步进精度。利用这项技术,A5984 驱动器设计用于在全步进至 1/32 步进模式下操作双极步进电机,并可实现高达 40 V 和 ±2 A 的输出驱动能力。 总体而言,QuietStep 算法可简化系统设计、实施和操作。
-
步进电机
+关注
关注
150文章
3109浏览量
147443 -
运动控制
+关注
关注
4文章
579浏览量
32855
发布评论请先 登录
相关推荐








 工商网监
工商网监
评论