 KUKA 机器人编程语句SWITCH介绍
KUKA 机器人编程语句SWITCH介绍
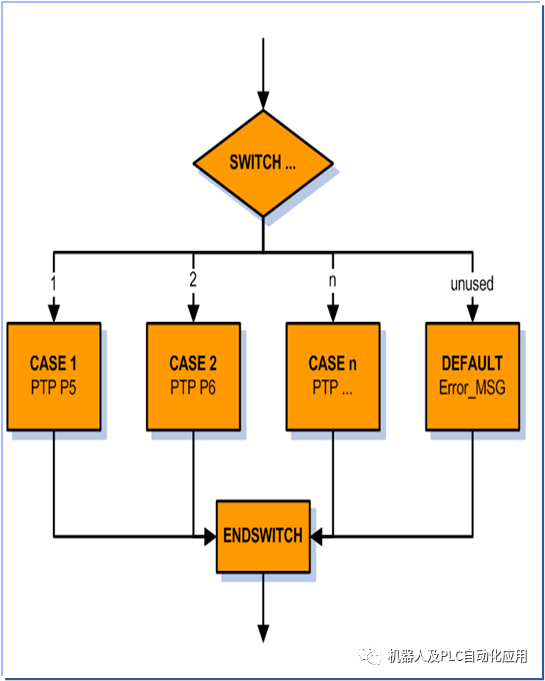
在几个语句分支中选择。
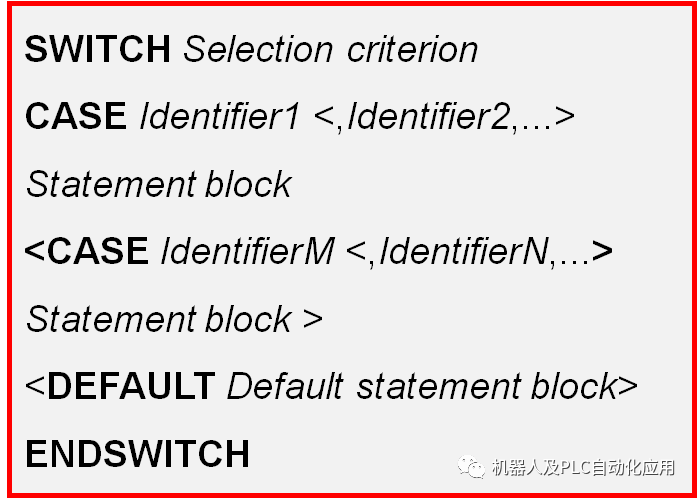
SWITCH 选择标准
CASE 标记 1 <, 标记 2,...>
指令块
指令块 >
默认指令块>
ENDSWITCH
SWITCH语句是为了选择程序中的变量。选择标准由前面SWIT CH语句确定的值分配。
如果选择符合块标识符,那么执行相应的分支后程序直接跳跃到ENDSWITCH语句。如果没有块标识符符合选择标准,那么如果有DEFAUL语句块的话执行;否则程序在语句ENDSWITCH后重新开始。
几个块标识符能分配在一个程序分支中。另一方面,它几次使用一个块标识符是不明智的,作为首个分支有相应的经过考虑的标识符。
数据类型的选择标准和块标识符必须符合。SWITCH语句必须最少包含一个CASE语句;它必须确保没有空白行或注释出现在SWITC指令和第一个CASE语句之间。
DEFAULT 语句可以被忽略。在SWITCH语句中默认的语句可能只出现一次。
SWITCH语句不能使用EXIT语句提前的退出。
范例 :
选择标准和整数类型的块标识符。DEFAULT语句在这儿用于输出错误信息。
SWITCH VERSION
CASE 1
SP_1( ) ;调用子程序SP_1
CASE 2,3
SP_2( ) ;调用子程序SP_2
SP_3( ) ;调用子程序SP_3
SP_3A( ) ;调用子程序SP_3a
DEFAULT
ERROR_SP( ) ;调用子程序ERROR_SP
ENDSWITCH
选择标准和字符类型的块标识符。语句SP_5( )从不执行,因为块标识符“JOHN” 出现了两次。
SWITCH NAME
CASE ”ALFRED”
SP_1( );调用子程序SP_1
CASE ”BERT”,”JOHN”
SP_2( );调用子程序SP_2
SP_3( );调用子程序SP_3
CASE ”JOHN” SP_5( ); 调用子程序SP_5ENDSWITCH
例如在CELL里:
Folgestarten打开Folge程序
-程序启动-
SWITCH P_TYPE-程序使用类型选择
CASE0;-以整数形式接受发出程序号
SWITCHPGNO
CASE10-如程序满足选择程序10
FOLGE10()-执行程序10
CASE124
FOLGE124()
CASE125
FOLGE125()
ENDSWITCH
选择标准
类型:INT、CHAR、ENUM
可能是所述数据类型的变量、功能调用或表达式。
标记
类型:INT、CHAR、ENUM
标记的数据类型必须与选择标准的数据类型一致。
一个指令块可以有任意多的标记。多个标记必须通过逗号相互隔开。
-
数据
+关注
关注
8文章
7002浏览量
88938 -
编程
+关注
关注
88文章
3614浏览量
93685 -
KUKA机器人
+关注
关注
4文章
143浏览量
9071
原文标题:KUKA 机器人编程语句SWITCH...CASE...ENDSWITCH
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
自律型机器人制作入门.基于Arduino
KUKA机器人问题解答
库卡KUKA机器人四种启动方式介绍
KUKA库卡机器人伺服驱动器相关型号举例
KUKA焊接机器人伺服电机常见故障及维修处理
工业机器人组成结构相关资料分享
Motoman机器人离线编程
库卡机器人MGV电源模块维修
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载






 工商网监
工商网监
评论