 「微侃」未来的智能驾驶,还需要高精度地图吗?
「微侃」未来的智能驾驶,还需要高精度地图吗?
聚焦汽车科技,剖析产业趋势和变革浪潮
假如你今年有买车的打算,现在有两台配置几乎一模一样的车,价格也在预算范围。唯一的不同,就是其中一台辅助驾驶的功能。你愿意为这个多出来的功能花多少钱呢?
根据辅助驾驶实现的功能高低不同,这个市场价大约是几千到几万块,但很有可能大部分用户的答案是:0。也就是说,直接选择没有配置辅助驾驶的、更便宜的车。我完全理解这样的选择,因为现在就算好用的高阶辅助驾驶,大多有点鸡肋,只能在有高精度地图的区域使用,而高精度地图覆盖的区域又不多,这点儿为数不多的体验,不买单显然是比较理性的选择。
高精度地图曾经是各方争夺的关键资源。但今年,华为率先站出来说,它的城市辅助驾驶技术,不再依赖高精度地图了。
那么高精度地图是什么?为什么当初做自动驾驶的企业会选高精度地图这条技术路线?现在又为什么被放弃了?
Part 1
缘起
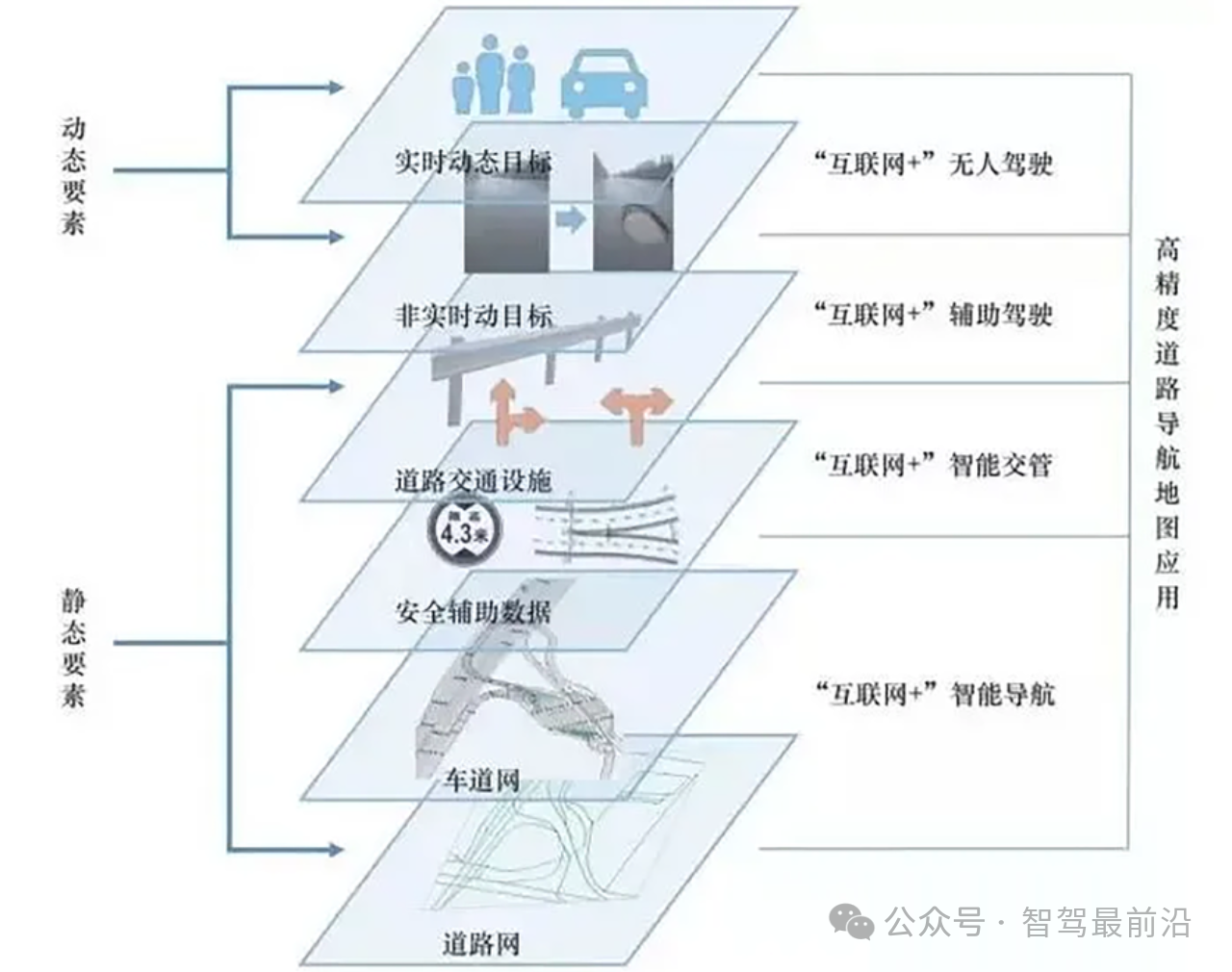
高精度地图是一种精度可达厘米级的电子地图,相比之下,传统电子导航地图精度为米级。高精度地图包含了更多的信息:
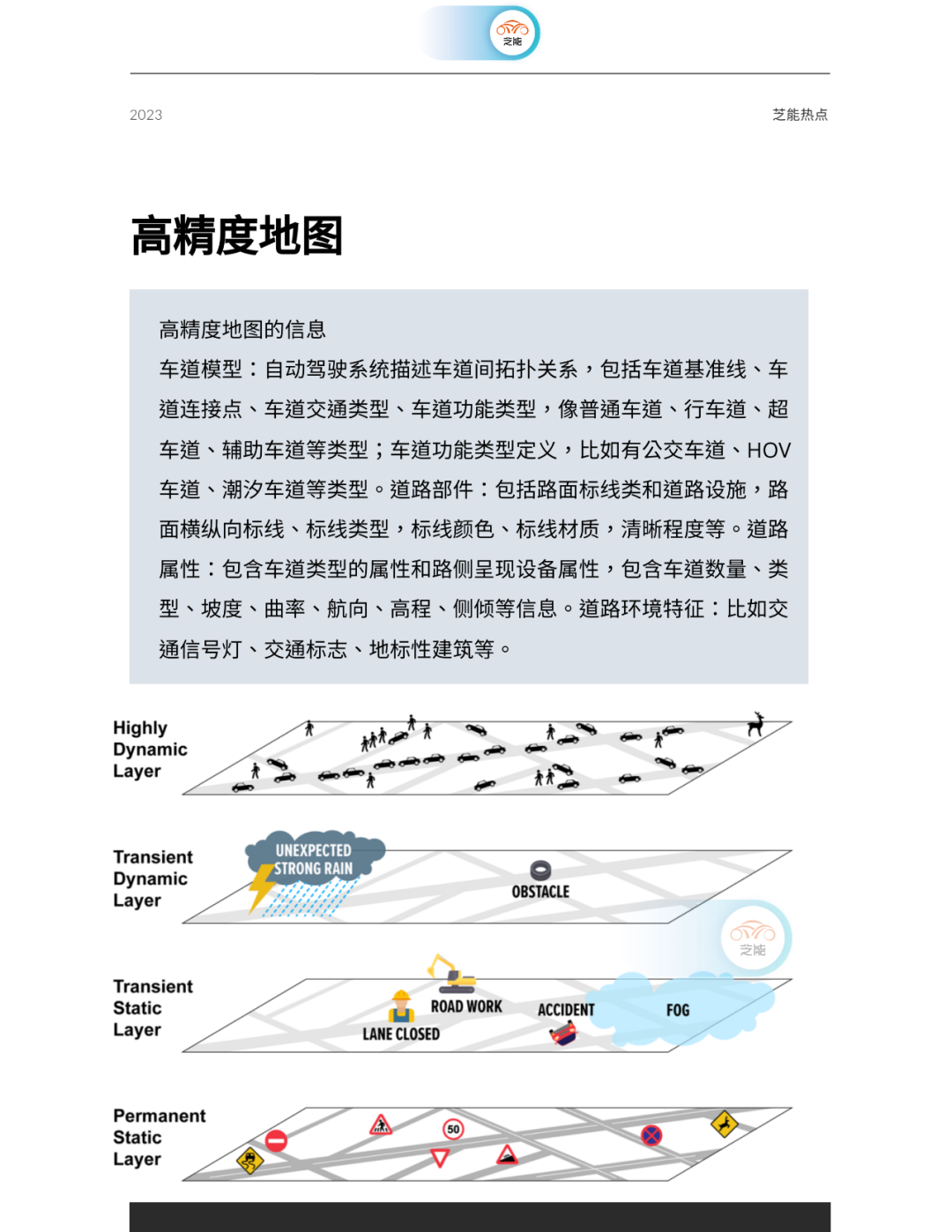
车道模型:自动驾驶系统描述车道间拓扑关系,包括车道基准线、车道连接点、车道交通类型、车道功能类型,像普通车道、行车道、超车道、辅助车道等类型;车道功能类型定义,比如有公交车道、HOV车道、潮汐车道等类型。
道路部件:包括路面标线类和道路设施,路面横纵向标线、标线类型,标线颜色、标线材质,清晰程度等。
道路属性:包含车道类型的属性和路侧呈现设备属性,包含车道数量、类型、坡度、曲率、航向、高程、侧倾等信息。
道路环境特征:比如交通信号灯、交通标志、地标性建筑等。
高精度地图提供超视距环境感知能力以及提供车道级别最优路径规划。因此,高精度地图在高级别的辅助驾驶中,可以实现更可靠的融合高精定位。
●高精度地图怎么生成的
曾经,激光雷达和高精度地图是天生一对——Google旗下的Waymo率先开始研究自动驾驶技术,就是利用激光雷达制作高精度地图。激光雷达输出的点云数据,将每帧的数据拼接起来,从而建立整个场景的点云地图,然后在拼接好的点云地图基础上,标注出车道线信息、交通标志信息、红绿灯信息等,最后得出道路的结构化信息。
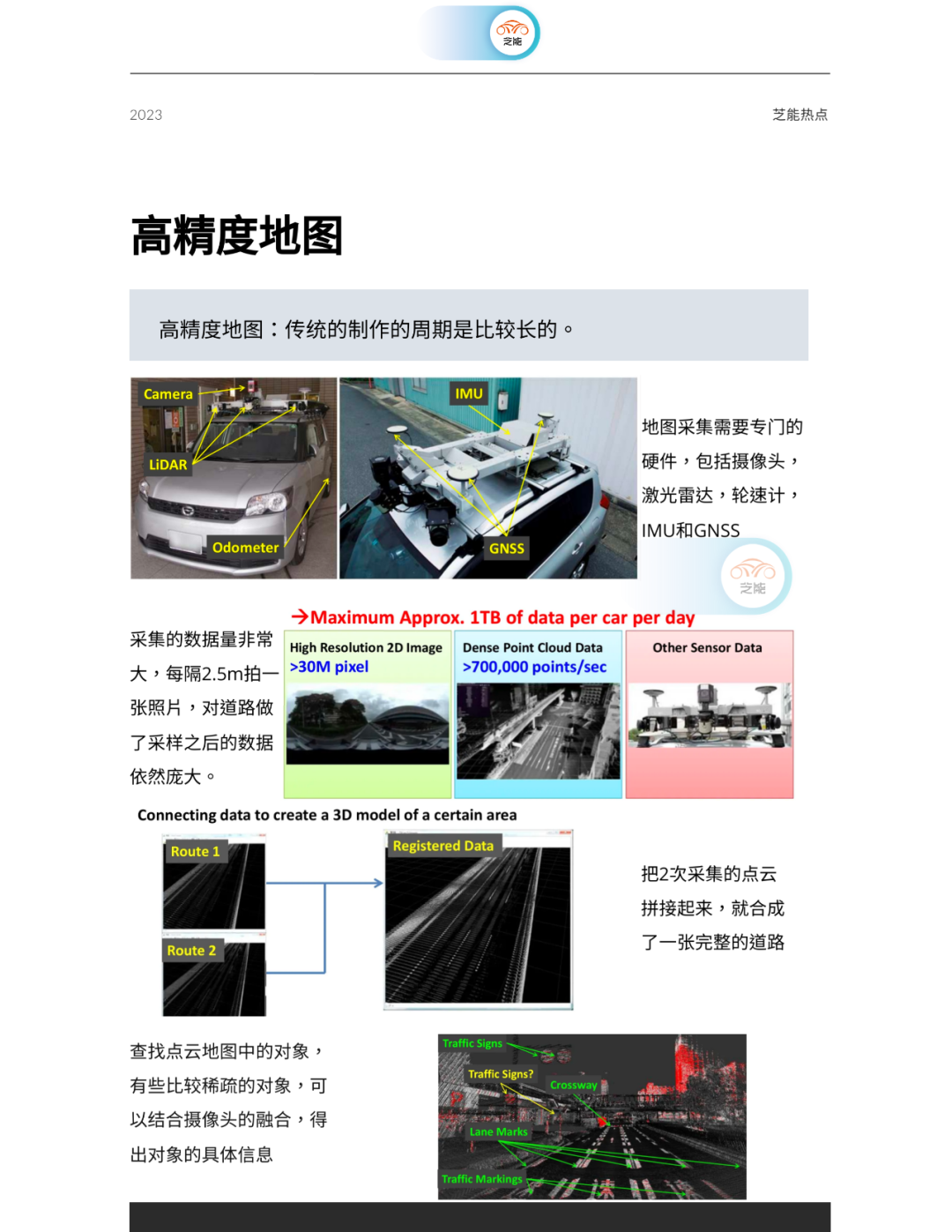
从高精地图的生成方式就可以看出,这是一件数据量很大的工作,尤其一开始这些标注都是靠人工手动,后来改为效率更高的自动标注,但工作量并不会减少。所以高精度地图一般只在封闭的路段提供,而且只是部分路段。
车企一般会选择直接购买图商提供的地图,欧洲三大车企戴姆勒、宝马和奥迪就斥资 25亿欧元收购诺基亚地图服务Here。

曾经,除了特斯拉之外,所有的玩家都觉得激光雷达是高精度地图的必需品:
◎Waymo使用高精度地图和激光雷达+定位做匹配
◎传统汽车企业使用高精度地图做匹配,让L2级别的辅助驾驶可以做到脱手操作,比如通用汽车的Super Cruise
在中国,以小鹏汽车为代表的新势力车企,在自动驾驶技术上迎头赶上。他们在国内首先将高精度地图与激光雷达技术相结合,取得了显著的成果。
●特斯拉对高精度地图的不同看法
然而,特斯拉凭借Tranfomer 模型取得重要突破,在两次AI Day上展示了令人惊叹的技术潜力。
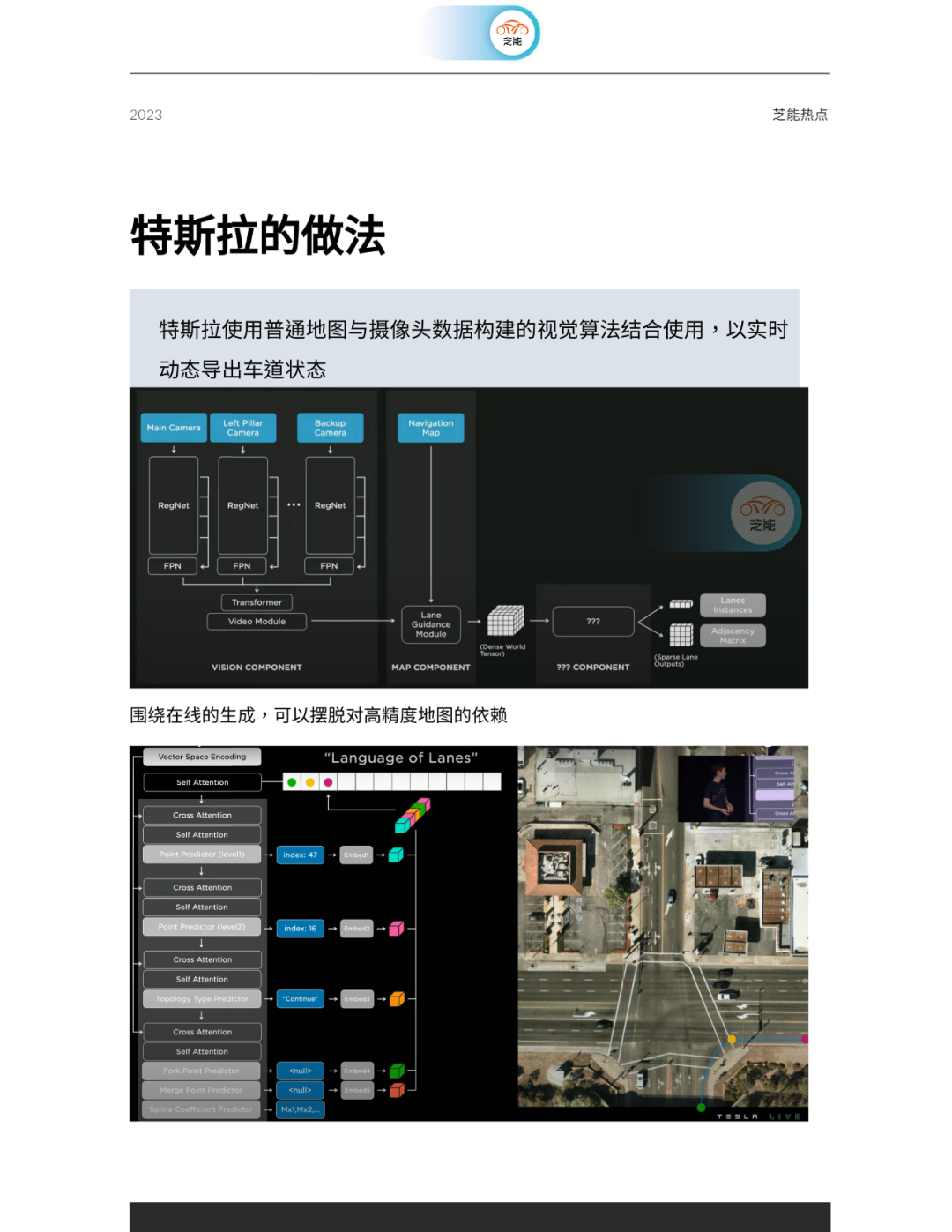
特斯拉使用纯视觉 、多视图的方案,把摄像头捕捉到的视觉信息融合在一起,让他的车能更好地理解周围的环境。
为了更准确地描述道路上的车道线和其他关键点之间的关系,特斯拉还会阅读地图上的文字描述,然后用Tranfomer 模型 把这些信息融入到自动驾驶的视觉系统中。这让系统不仅能找到车道线、人行横道线等地图元素,还能了解更多车辆行驶所需的信息,提高定位准确性。
特斯拉还能把不同类型的数据翻译成同一种语言,让他们在同一个“语义空间”中对话,然后用Tranfomer 模型 让他们相互学习,获得更丰富的信息。这里本质上也是建立了高精度地图,但不同于 之前的地图,这是一种局部、实时构建高精度地图,这种方式更有效率,可以降低制作成本、提高使用便利性和能够实时更新。
Part 2
城市战场
随着自动驾驶技术的普及,全球各大车企开始将竞争从高速场景转向城市自动驾驶场景。传统的高精度地图制图方式,开始赶不上新的需求了。特斯拉的技术优势开始凸显,而中国汽车企业也紧随其后。
●高精度地图技术的突破
传统的高精地图想要全面铺开使用,难度非常大。第一是因为高精度地图要覆盖全国,范围太大,很多道路使用频度不高,因此用标注的方式去生成地图,不知道什么时候才能收回成本。另一个问题是城市场景对高精地图的鲜度要求很高,国内的道路几乎实时在变动,传统制作高精度地图的方法是没办法满足鲜度要求,所以需要局部实时构建高精度地图的技术,就成为实现城市辅助驾驶的关键。
高精度地图的鲜度(Freshness)指的是地图数据的实时性和更新频率。随着道路状况、交通标志、建筑物等地理环境不断发生变化,高精度地图的准确性和可靠性可能会受到影响。因此,为了确保地图数据的准确性和可靠性,需要定期更新地图,使其保持新鲜状态。
简而言之,地图鲜度是衡量高精度地图数据是否保持最新状态的一个重要指标。更新频率越高,地图的鲜度就越好,用户在导航、自动驾驶等方面的体验也就越好。
◎小鹏在第二代智能辅助驾驶系统 XNGP 中逐步摆脱高精地图的依赖,今年 3 月底推送的第一阶段能力,已经在全国无精度地图城市部分解锁了 NGP:
- 2023 年上半年,城市 NGP 发布,支持广州、深圳、上海;全国范围(所有无图城市)开放识别红绿灯并直行通过路口能力
- 2023 年下半年,大部分无图城市开放变道、超车、左右转能力
- 2024 年上半年,全场景打通,实现从车位到车位的智能导航辅助驾驶能力
◎2023华为智能汽车解决方案发布会上,华为发布了高阶智能驾驶系统ADS 2.0,宣布不再依赖高精地图。同时,公布了一项激进计划:今年第三季度将在15城落地,第四季度扩大至45城。搭载HUAWEI ADS 2.0系统的汽车,都可以实现城区的辅助驾驶。

HUAWEI ADS 1.0已实现基于Transformer的BEV架构,而HUAWEI ADS 2.0进一步升级,基于道路拓扑推理网络进一步增强,即使无(传统)高精地图也能看懂路,红绿灯等各种道路元素。
●合作与竞争
可以看出,所谓“无图”指的就是不再依赖传统的高精度地图,那以前的高精度地图还能用吗?
目前来看传统的高精度地图有点像自动驾驶的轮椅,过分依赖高精地图会让自动驾驶系统变得极其脆弱,普及起来更加困难,所以目前大家都在尝试从这个轮椅上站起来。智能辅助驾驶后续的发展路线,将会在高速等有地图的路段,继续使用高精度地图,而在无图的路面,采用实时构建高精度地图的模式。从而逐渐减少对传统高精地图的依赖。
Part 3
未来之路
自动辅助驾驶技术正在改变我们的出行方式。技术路线的竞争如火如荼,已经从高速公路的较量进入了城市驾驶的新战场。特斯拉引领着时代的潮流。中国汽车企业也紧随其后。
高精度地图并未真正消失,它仅是从传统标注的方式蜕变为实时局部的高精度地图。真正消失的,是传统的高精度地图生成方法。用Tranfomer 模型+BEV架构生成的高精度地图,能够更加迅速地更新,适应各种场景的需求。这是在大数据计算能力和创新方法的基础上所实现的技术突破,为自动辅助驾驶的不断改进提供了强大的推动力。
审核编辑 :李倩
-
高精度
+关注
关注
1文章
525浏览量
25449 -
智能驾驶
+关注
关注
3文章
2505浏览量
48734 -
自动驾驶
+关注
关注
784文章
13784浏览量
166370
原文标题:「微侃」未来的智能驾驶,还需要高精度地图吗?
文章出处:【微信号:QCDZSJ,微信公众号:汽车电子设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
企业上云后还需要数据库运维吗?真实答案看过来!
纳芯微发布低功耗高精度Δ-Σ型ADC
高精度定位在智能驾驶中有何关键作用?
高精度融合定位技术的原理、应用领域以及未来发展趋势


有了MES、ERP,为什么还需要QMS?

抛弃高精度地图旧模式,走向视觉感知新时代?
Aigtek:为什么需要高精度电流源

#2024,立Flag了嘛? #学习spinal HDL还需要学习对应的Scala语言
推荐一个好用的高精度MEMS惯性测量单元
自动驾驶地图研究:SD pro MAP快速上车,助力城市NOA轻地图智驾方案






 工商网监
工商网监
评论