 异步电机速度估计之直接计算法
异步电机速度估计之直接计算法
导读:异步电机速度估计的方法主要分为两大类:模型法和基于非理想特性的方法。本期文章介绍的是直接计算法(动态速度估计器),这种方法属于模型法中的开环速度估计。
如果需要文中的仿真模型,关注微信公众号:浅谈电机控制,留言获取。
异步电机矢量控制系统中,转速的闭环控制必不可少,其是保证控制稳定性和控制性能的保证。矢量控制从其获取速度的不同方法来分,可以分为有速度传感器和无速度传感器两大类。一般早期的异步电机矢量控制常采用光电码盘等速度传感器来进行转速的直接检测,并反馈被测电机的转速信号。但额外的速度传感器不仅会增加系统的成本,其次如果传感器安装不当也易影响测速精度,而且传感器的安装还会使电机轴向上体积增大,给电机的日常维护带来一定困难,并且速度传感器还会降低电机的机械鲁棒性,在高温、高湿环境下传感器精度也会受到影响.基于这些不足,为了克服上述问题人们开始研究无速度传感器矢量控制方法。
本文着眼于无速度传感器矢量控制系统的研究,重点在于讲解异步电机无速度传感器矢量控制系统的实现,井给出一些控制系统框图进行试验仿真,接下来就无速度传感器矢量控制方法速度估计的一些方法介绍(本期重点先讲解动态转速估计器)。
一、动态转速估计器介绍
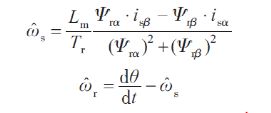
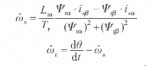
动态转速估计器是以电机的动态派克方程为基础进行推导,分别由电机的电磁关系及转速的定义数学方程式中得到关于转差或转速关系的表达式,其推导方法具体可以从以下三个方面入手:
(1)转子磁场定向控制入手求解电机的角速度;
(2)定子磁场定向控制方程求解角速度;
(3)电机方程直接推导角速度;
本文介绍的是一种常用的异步电机动态转速估计器方案是磁链闭环估算,速度开环计算。
二、仿真系统搭建
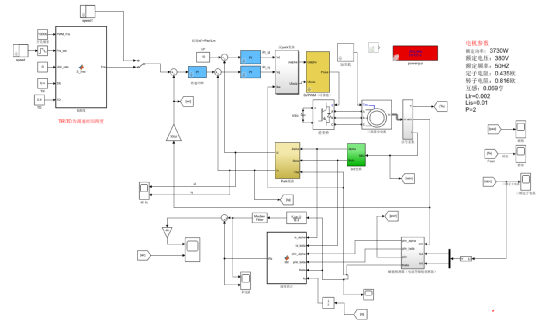
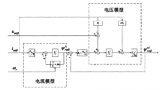
图1 异步电机无速度传感器矢量控制系统仿真
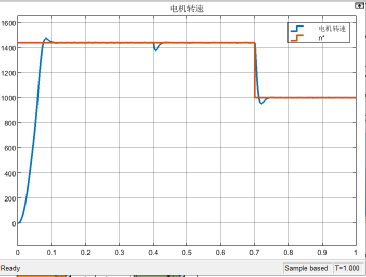
图2 异步电机无速度传感器矢量控制系统仿真波形变化情况
从图2可以发现,速度估计的波形在突加载和速度变化的时候都能很好的跟踪上给定值,证明该估计方法的可行性和有效性。
三、总结
第一节介绍的三种角速度的估算方法,具有直观性强、速度的计算理论上没有延时, 但这种动态转速估计的缺点也是十分突出。其缺点具体表现在,该方法计算中包含磁通量的计算,因此电机磁通的观测与控制好坏直接影响电机转子转速估计的精度.其次,由其计算方程式可以看出方程中包含了大量电动机参数,但由于交流异步电机是个非线性系统,其电机参数会随着电机使用时间,温度、湿度,及供电频率等因素的影响而发生变化.为了解决电机参数变化的影响, 常需要在电机控制系统中加上参数的辨识环节,但是额外的参数辨识环节会使系统过于复杂,且辨识过程的延时十分的严重,但若不加上辨识环节,则会使计算精度受到影响.再次由于动态转速估计器是从电机方程式入手求解角速度的,但电机的非线性性,会使电机速度随时发生变化,而由于动态估计器估计电机速度的方法缺少误差校正环节,所以难以保证系统的抗干扰性能,从而导致系统不稳定的运行情况.总之,如何有效的进行电机参数辨识,以及利用误差校正环节来提高系统速度估计的抗干扰能力,是动态转速估计器方法需要进一步研究的方向.
-
传感器
+关注
关注
2550文章
51035浏览量
753047 -
算法
+关注
关注
23文章
4607浏览量
92821 -
异步电机
+关注
关注
6文章
427浏览量
32844
发布评论请先 登录
相关推荐
异步电机的无速度传感矢量控制设计
基于遗传算法的异步电机
异步电机直接转矩控制simulink仿真教程
基于EKF的异步电机直接转矩控制系统
异步电机直接转矩控制simulink仿真

异步电机控制笔记
异步电机矢量控制之磁通估计器
异步电机速度估计-直接计算法






 工商网监
工商网监
评论